Professional Documents
Culture Documents
Alegerea Detectorilor Inteligenti
Uploaded by
Dan Constantin0 ratings0% found this document useful (0 votes)
28 views16 pagesalegerea detectorilor inteligenti
Original Title
alegerea detectorilor inteligenti
Copyright
© © All Rights Reserved
Available Formats
PDF, TXT or read online from Scribd
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this Documentalegerea detectorilor inteligenti
Copyright:
© All Rights Reserved
Available Formats
Download as PDF, TXT or read online from Scribd
0 ratings0% found this document useful (0 votes)
28 views16 pagesAlegerea Detectorilor Inteligenti
Uploaded by
Dan Constantinalegerea detectorilor inteligenti
Copyright:
© All Rights Reserved
Available Formats
Download as PDF, TXT or read online from Scribd
You are on page 1of 16
MODULUL 3 - 2.
TEHNOLOGII MODERNE DE DETECTARE
MODULUL 3-2
TEHNOLOGII MODERNE DE DETECTARE
3.7. Criterii de alegere a detectorilor............................................................................63
3.7.1. Alegerea detectorilor pe baza modului de operare........................................63
3.7.2. Alegerea detectorilor pe baza aplicaiei.................................................63
3.7.4. Alegerea detectorilor pe criterii de mentenan......................................63
3.8. Consideraii de proiectare............................................................................64
3.8.1. Parametrii de semaforizare.................................................................64
3.8.1.1. Intervalul de verde minim............................................................64
3.8.1.2. Intervalul de timp de trecere........................................................65
3.8.1.3. Intervalul de verde maxim...........................................................66
3.8.1.4. Modul volum densitate.............................................................66
3.8.2. Intrri cu viteze de acces mici.............................................................66
3.8.2.1. Blocarea memoriei prin puncte de detectare..............................67
3.8.2.2. Memorie neblocat cu detectare de prezen.............................67
3.8.3. Intrri cu viteze de acces mari.............................................................69
3.9. Alternative de proiectare a buclelor detectoare...........................................71
3.9.1. Detectarea pe suprafee mici...............................................................71
3.9.2. Detectarea pe suprafee mari..............................................................73
3.9.2.1. Buclele lungi................................................................................73
3.9.2.2. Bucle secveniale scurte..............................................................75
3.9.2.3. Bucle pentru detectarea vehiculelor care vireaz la stnga........75
3.9.2.4. Detectarea traficului pe direcia nainte.......................................75
3.9.2.5. Detectarea ocuprii buclei...........................................................76
3.9.2.6. Detectarea n puncte cu viteze ridicate.......................................76
TEST 4.................................................................................................................77
62
MODULUL 3 - 2. TEHNOLOGII MODERNE DE DETECTARE
3.7. CRITERII DE ALEGERE A DETECTORILOR
Activitatea de proiectare a planurilor de semaforizare, a sistemului de semnale de
trafic, precum i a sistemelor de supraveghere i control al circulaiei pe autostrzi,
necesit o selecie corect a sistemului de detectare utilizat, dup tip, mrime, form i
localizare a detectorului.
Analiza aplicaiilor actuale arat c detectorul tip bucl inductiv este n continuare cel
mai folosit. Principalele criterii de selectare a sunt prezentate, pe scurt, n continuare.
3.7.1. ALEGEREA DETECTORILOR PE BAZA MODULUI DE OPERARE
Alegerea se bazeaz pe cunoaterea principiilor de operare ale diferiilor detectori
(bucl inductiv, magnetic sau magnetometru) dar i detectorii de alte categorii i a
aplicaiilor crora le sunt destinai. Astfel, magnetometrele nu pot fi folosite s completeze
anumite controlere de trafic care funcioneaz pe principiul unui apel cnd se nregistreaz
ntrzieri ce depesc o valoare limit. De asemenea, detectorii magnetici trebuie exclui
ntruct ei pot detecta doar prezena vehiculelor aflate n micare (detectarea trecerii).
Detectorii tip bucl nu pot fi folosii ntotdeauna n anumite aplicaii pentru
semaforizarea traficului. De exemplu, nu sunt recomandai atunci cnd este cerut
detectarea fluxurilor rutiere suprasaturate sau n cazul cozilor lungi de vehicule.
Se recomand folosirea buclelor inductive n operaiunile de supraveghere i control al
traficului pe autostrad unde mrimea zonei de detectat este controlat n sistem cu
reacie invers (sistem nchis) i anumite mrimi trebuie s fie predictibile.
3.7.2. ALEGEREA DETECTORILOR PE BAZA APLICAIEI
Alegerea detectorilor pentru aplicaii specifice este mult mai apropiat de utilizarea
practic a acestora. n teorie, pentru detectarea traficului pe arii ntinse, din intrrile n
interseciile semaforizate, sunt recomandai att detectorii bucl ct i magnetometrele. n
schimb, buclele sunt semnificativ mai ieftine.
n intrrile n care nu este important afiarea apelurilor false pentru semnalul de verde
(de exemplu, virajul la dreapta pe semnalul de rou) i este adecvat doar detectarea
obinuit a traficului, se pot instala oricare dintre cele trei tipuri amintite de detectori, dar
se recomand alegerea detectorului magnetic pentru robustee i raport cost/eficacitate
sczut.
3.7.3. ALEGEREA DETECTORILOR PE BAZA MODULUI DE INSTALARE
Aplicaiile de nceput ale tehnologiilor de detectare au demonstrat c alegerea unor
detectori tip radar sau ultrasonici care pot fi montai cu uurin pe stlpii deja existeni n
intersecii fr ntreruperea fluxurilor de trafic sau deteriorarea pavajului poate fi efectuat
n mai puin de o or. Progresele nregistrate recent n domeniul electronicii au ncurajat
interesul pentru detectorii montai deasupra solului.
n ceea ce privete instalarea detectorilor bucl preocuprile sunt ndreptate spre
eliminarea tieturilor din asfalt i nlocuire a acestora cu o groap forat care ar permite
instalarea unor bucle mici performante sau, ca alt alternativ, dale de asfalt cu bucle deja
montate.
Alegerea detectorilor trebuie s ia n considerare i aspecte legate de sigurana
echipamentului.
3.7.4. ALEGEREA DETECTORILOR PE CRITERII DE MENTENAN
Din experiena celor care au folosit diferite tehnologii de detectare s-au constatat
diferenele privind costul de ntreinere a diferitelor tipuri de detectori. De exemplu,
63
MODULUL 3 - 2. TEHNOLOGII MODERNE DE DETECTARE
detectorii magnetici, cu aplicaiile lor limitate, pot fi recomandai datorit robusteii i a
durabilitii crescute cu cheltuieli de ntreinere minime.
Unitile de detectare electronice ale buclelor inductive au progresat n ceea ce
privete mentenana, datorit ateniei acordate punctelor mai puin fiabile, expuse
defectrilor frecvente. Acest criteriu ia n considerare posibilitile de reducere a costurilor
de ntreinere n termeni ai frecvenei defectrilor i a apelurilor care solicit ntreinerea.
3.8. CONSIDERAII DE PROIECTARE
Caracteristicile programelor de semaforizare ale controlerului unei intersecii au o
legtur direct cu tehnicile de detectare folosite ceea ce recomand alegerea lor nc de
la nceputul fazei de proiectare. Astfel, trebuie definii parametrii specifici programelor de
semaforizare, efectul buclelor lungi sau scurte asupra posibilitlor de detectare a vitezelor
sczute sau ridicate ale vehiculelor n intrrile din intersecii.
3.8.1. PARAMETRII DE SEMAFORIZARE
n mod obinuit, n cazul semnalelor actualizate, n plus fa de elementele cunoscute
ale unui ciclu de semaforizare, timpul de verde, timpul de evacuare de galben i cel de
rou/galben i timpul de rou peste tot, atunci cnd acesta este prezent, exist trei
parametrii de semaforizare:
Intervalul de verde minim, numit interval iniial;
Timpul de trecere, numit intervalul vehiculului, interval de extensie, sau unitate de
extensie;
Intervalul de verde maxim.
Corelaia dintre aceste intervale este prezentat n figura 3.19.
Figura 3.19. Intervalele actualizate ale controlerului.
Aceste intervale sunt stabilite funcie de tipul i configurarea instalrii detectorilor din
intersecie.
3.8.1.1. Intervalul de verde minim
n aplicaiile de debut ale tehnologiilor de detectare, cele mai multe detectoare
reprezentau puncte de detectare i au constat n pedale sau discuri de presiune instalate
64
MODULUL 3 - 2. TEHNOLOGII MODERNE DE DETECTARE
n drum. n prezent, buclele de 1,8 x 1,8 m reprezint, de asemenea, o form a
detectorului punctual. Atunci cnd se folosete detectarea local este stabilit intervalul de
verde minim pentru a permite vehiculelor oprite ntre punctul de detectare i linia de stop
s porneasc i s strbat intersecia. Tabelul 3.1 prezint intervalul de verde minim
pentru diferite valori ale distanelor msurate de la linia de stop la detector. Datele se
bazeaz pe valoarea medie a distanelor dintre vehiculele ce se urmresc, considerat de
6m, i timpii medii pentru vehiculele unui ir care intr ntr-o intersecie.
Tabelul 3.1. Timpul de verde minim funcie de distan.
Distana dintre linia de stop i detector, m Timp de verde minim, s
0 12,2 8
12,5 18,3 10
18,6 24,4 12
24,7 30,5 14
30,8 36,6 16
Abordarea diferit a distribuiei semnalelor servete la stabilirea duratei intervalelor de
verde pentru detectarea prezenei. Cnd sunt folosite bucle lungi sau bucle scurte n serie,
care sunt plasate nainte de linia de stop, intervalul iniial are valoarea sczut sau zero
pentru rspunsul rapid n cazul fazelor de viraj la stnga sau, posibil mai lungi, pentru
micarea nainte, unde conductorul auto se ateapt s aib un interval de verde mai
mare. Dac buclele se sfresc la o distan de linia de stop, aceast distan este folosit
pentru a calcula intervalul de timp n acelai mod ca pentru punctele de detectare.
3.8.1.2. Intervalul de timp de trecere
Intervalul de timp de trecere este ales, astfel nct s permit unui vehicul s se
deplaseze de la detector pn la intersecie. Acest interval este important n special,
atunci cnd punctele de detectare sunt localizate la distan fa de linia de stop. Timpul
de trecere definete, de asemenea, intervalul de timp aparent maxim dintre acionrile
vehiculelor care se pot produce fr a pierde semnalul de verde prin ateptarea la apel.
Att timp ct intervalul dintre acionri este mai scurt dect intervalul de timp de trecere,
timpul de verde va fi reinut pentru faza respectiv.
Intervalul de timp dintre vehiculele unui ir de vehicule care trec peste detectorul bucl
este puin mai scurt dect intervalul iniial de timp. Un vehicul activeaz la traversare bucla
i aceasta nu trebuie s se dezactiveze pn cnd vehiculul nu a depit-o. Intervalul de
timp real dintre vehicule se reduce astfel, cu timpul necesar pentru ca vehiculul s
traverseze bucla.
Un alt factor ce trebuie luat n considerare, la determinarea unui interval de timp potrivit
ntre vehicule, este numrul de benzi pe care au fost montai detectori. Detectorii care
deservesc aceeai faz i funcioneaz prin instalarea pe benzi adiacente sunt adesea
conectai la un amplificator, prin intermediul unui singur cablu de racordare. Aceasta poate
prezenta o reprezentare deformat.
Anumite tipuri de controlere (de exemplu NEMA) au un timp minim de verde predefinit.
Dac nu se produc acionri suplimentare, timpul total este timpul minim de verde. Dac,
pe de alt parte, exist acionri suplimentare, intervalul de verde se extinde pn cnd un
interval de timp dintre vehicule depete timpul de trecere sau s-a atins limita timpului de
verde maxim. Corelaia dintre aceste elemente este prezentat n figura 3.19.
n cazul n care se folosesc bucle lungi, n special pentru benzile de stocare ale
virajului stnga, timpul de verde minim i intervalele de timp de trecere sunt stabilite la
valoarea zero sau apropiat de zero. Buclele lungi opereaz n modul prezen, iar
controlerul extinde n mod continuu timpul de verde, att timp ct bucla este ocupat.
Intervalul de timp critic dintre vehicule nu are o valoare prestabilit, dar corespunde unui
65
MODULUL 3 - 2. TEHNOLOGII MODERNE DE DETECTARE
interval spaial echivalent lungimii buclei. Cu alte cuvinte, nici un vehicul urmritor nu
poate intra peste bucl pn la plecarea vehiculului urmrit.
Cnd sunt folosite mai multe bucle scurte legate n serie, acestea acioneaz ca o
singur bucl, n condiia n care distana dintre bucle este mai mic dect lungimea unui
vehicul. Dac aceast distan este mai mare dect lungimea unui vehicul intervalul de
trecere a unui vehicul de lungime redus poate fi folosit pentru acelai efect ca i o
singur bucl lung.
3.8.1.3. Intervalul de verde maxim
Intervalul de verde maxim limiteaz durata unei faze. Intervalul de verde maxim
declaneaz faza urmtoare la apariia unui apel primit de pe direcia fazei urmtoare. n
mod obinuit intervalele maxime de timp au valori cuprinse ntre 30 60 secunde.
Anumite automate de dirijare sunt capabile s furnizeze dou intervale de timpi de verde
maxim pe faz. Aceasta permite utilizarea celor mai lungi timpi de verde n perioadele de
vrf cnd se anticipeaz fluxuri de trafic foarte aglomerate pe artera principal.
3.8.1.4. Modul volum densitate
Pentru acest tip de operare, detectorii sunt plasai, n general, mult nainte de
intersecie, n mod particular n intrrile de vitez mare. Valoarea intervalului de verde
minim poate fi mrit pentru a furniza timpi de verde iniiali mai lungi. Timpul iniial variabil
poate avea dou posibiliti de selectare, timpul de verde minim, exprimat n acionri per
secund, i timpul de verde iniial maxim. Procedura care este prezentat n figura 3.20.
urmrete standardele NEMA.
Figura 3.20. Timpii iniiali variabili ai programului de semaforizare.
3.8.2. INTRRI CU VITEZE DE ACCES MICI
Intrrile n intersecii, n care vehiculele se deplaseaz cu viteze inferioare vitezei de 56
km/h, sunt considerate de vitez mic. Proiectarea tipurilor de detectori folosii pentru o
anumit intrare depinde de fazele controlerului care pot fi setate s memoreze modul
blocat sau neblocat.
Modul blocat are semnificaia faptului c apelul unui vehicul pentru semnalul de verde
este memorat i reinut de ctre controler pn cnd cererea este satisfcut prin afiarea
semnalului verde, chiar dac vehiculul care a realizat apelul a prsit zona (de exemplu,
virajul la dreapta pe durata semnalului de rou)
n cazul modului neblocat, un apel n ateptare este uitat imediat ce vehiculul a prsit
zona.
66
MODULUL 3 - 2. TEHNOLOGII MODERNE DE DETECTARE
3.8.2.1. Blocarea memoriei prin puncte de detectare
Blocarea memoriei de detectare este asociat cu folosirea detectorilor pe zone mici
puncte i se refer, n mod frecvent, la controlul convenional. Intervalul de verde minim
(interval iniial) este prestabilit, pentru a permite unui ir de vehicule ce ocup spaiul
dintre detector i linia de stop, un interval de timp suficient pentru evacuarea interseciei.
Timpul de trecere sau unitatea de extensie fixeaz att intervalele admisibile (reinerea
semnalului de verde), ct i timpul de deplasare de la detector la linia de stop, la o valoare
comun.
Intervalul admisibil este considerat n mod obinuit de 3 sau 4 secunde. Aceasta indic
faptul c detectorul ar trebui localizat n mod corect la o distan fa de linia de stop care
s necesite 3 sau 4 secunde de deplasare. Aceast poziie a detectorului ar putea aprea
ca fiind cea mai eficient pentru cronometrarea corect a sfritului semnalului de verde
dup trecerea ultimului vehicul din ir. n acest caz, se recomand ca localizarea
detectorilor s nu depeasc 52 m de la linia de stop, n unele cazuri chiar 37 m. Pe
baza celor enunate anterior, localizarea detectorilor asociat cu parametrii de funcionare
ai controlerului, este funcie de viteza de deplasare, aa cum reiese din tabelul 3.2.
Tabelul 3.2: Localizarea detectorilor i parametrii de funcionare ai controlerului.
Viteza de
apropiere, km/h
Distana de la
linia de stop la
detector, m
Timp de verde
minim, s
Timp de trecere, s
24 12 9 3,0
32 18 11 3,0
40 24 12 3,0
48 30 13 3,5
56 41 14 3,5
64 52 16 3,5
72+ Se recomand detectori volum-densitate sau multipli
Avantajul intrrilor cu un singur detector const n principal n costurile minime de
instalare. Ca dezavantaj, acest tip de control al fluxurilor nu poate s identifice apelurile
false produse n cazul virajului pe semnalul de rou.
3.8.2.2. Memorie neblocat cu detectare de prezen
Acest caz este asociat cu folosirea detectorilor pe zone extinse prezentat n figura
3.21, (de exemplu utilizarea unei bucle de 1,8 x 15,2 m); schema este numit bucl cu
ocupare controlat.
Figura 3.21. Controlul ocuprii buclei.
67
MODULUL 3 - 2. TEHNOLOGII MODERNE DE DETECTARE
Prin furnizarea informaiei privind prezena vehiculelor n zona detectat, pot fi sortate
multe dintre apelurile false pentru semnal de verde, astfel evitndu-se afiarea unui
semnal de verde inutil, ntr-o intrare n care ateapt vehicule. Dezavantajul const n
costurile de instalare i ntreinere ridicate.
Utilizarea memoriei de detectare neblocate este recomandat, n special, n cazul
benzilor pentru virajul stnga pentru care este alocat o faz de semaforizare (viraj stnga
protejat).
Semnalul de verde pentru aceast direcie se sfrete numai cnd vehiculele ce
vireaz stnga au evacuat zona buclei. n plus, un apel efectuat de ctre un vehicul care
evacueaz intersecia pe durata semnalului de galben, nu va readuce semnalul de verde
ntr-o intersecie n care nu circul vehicule. Un avantaj potenial se obine n cazul
virajului stnga permis prin traversarea fluxului opus pe direcia nainte, atunci cnd este
afiat semnalul de verde pe direcia nainte.
Figura 3.22. Lungimea zonei de detecie pentru controlul ocuprii buclei.
Pe banda de stocare dedicat virajului stnga, pot fi folosii detectori cu apel ntrziat,
care sunt proiectai pentru a apela controlerul numai dac un vehicul este detectat
continuu pentru o perioad mai mare dect cea prestabilit (de exemplu, 5 secunde).
Aceasta permite detectorului s ignore vehiculele care sunt n tranzit peste bucl, dac
traficul pe direcia opus este puin intens i permite virajul stnga fr apelarea fazei
pentru virajul stnga. Dac traficul de apropiere din direcia opus este intens, astfel c
vehiculele formeaz un ir peste bucl, atunci este apelat faza pentru viraj stnga. Acest
tip de operare este utilizat, adesea, cu ntrzierea virajului stnga.
Un mod de operare similar se petrece n cazul intrrilor cu o singur band de
circulaie, ale interseciilor unde virajul dreapta se efectueaz pe semnalul de rou. i n
acest caz, utilizarea detectorilor cu apel ntrziat va conduce la evitarea apelului pentru
semnalul de verde de pe o arter lateral, dac virajul la dreapta pe rou poate fi efectuat
n perioada de ntrziere aleas pentru detector.
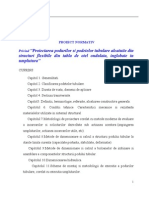
Controlul cu bucl ocupat este folosit n cazul vitezelor de apropiere mici. Tehnica
minimizeaz ntrzierile prin permiterea folosirii unor timpi scuri de trecere (de 0 la 1,5
secunde). Lungimea zonei de detectare depinde de viteza de apropiere i de setrile
controlerului. Figura 3.22 prezint lungimea zonei de detectare pentru diferite valori ale
timpilor de trecere setate n controler i viteze de apropiere sub 50 km/h,.
Diagrama se bazeaz pe intervale admisibile de 3 secunde i o lungime medie a
vehiculului de 5,5 m. Formula de calcul este urmtoarea:
68
MODULUL 3 - 2. TEHNOLOGII MODERNE DE DETECTARE
( ) 5 5 T 3 v 277 0 L
t
, , = (3.1)
unde: L lungimea zonei de detectare, metri
v viteza de apropiere, km/h
T
t
- timp de trecere (unitate de extensie), secunde
3.8.3. INTRRI CU VITEZE DE ACCES MARI
ntrrile n care vitezele de acces depesc 56 km/h sunt considerate intrri cu viteze
mari. Exist multe situaii n trafic, asociate accesului n intersecii cu viteze mari, care
necesit o atenie deosebit. La aceste viteze ar putea fi dificil pentru conductorul auto
s decid dac este mai bine s opreasc sau, s-i continue micarea pe durata
semnalului de galben. O oprire brusc poate avea ca rezultat o coliziune din partea
vehiculelor situate n spate, n timp ce decizia de a continua drumul se poate finaliza cu o
ciocnire n unghi drept sau nclcarea legislaiei rutiere. Aceast poriune a drumului
situat nainte de intersecie n interiorul creia conductorul auto este nedecis (s
continue sau s opreasc la apariia semnalului de evacuare de galben) este numit zona
de dilem.
Figura 3.23. Zona de dilem.
O alt definiie se refer la zona intrrii n intersecie situat ntre punctul n care 90%
dintre conductorii auto vor opri la semnalul de galben i un punct n care 90% dintre
conductorii auto vor trece (10% vor opri).
Tabelul 3.3 prezint aceste limite pentru diferite valori ale vitezei. Figura 3.23 ilustreaz
o zon de dilem tipic.
Tabelul 3.3: Limitele zonei de dilem.
Distana de la linia de stop, m pentru
probabilitatea opririi
Viteza de acces,
km/h
90% 10%
56 77 31
64 87 37
72 100 46
80 108 52
88 118 71
Pentru a micora afiarea necorespunztoare a semnalului de galben (i deci crearea
zonei de dilem) au fost imaginate numeroase tehnici pentru controlerele cu memorie
blocat sau neblocat, controlere cu control actualizat sau volum-densitate ca i pentru
diferite configuraii ale detectorilor.
n cazul intrrilor n interseciile cu viteza de acces mare, este folosit adesea,
controlerul cu modul de operare volum-densitate. Acest mod de operare permite
69
MODULUL 3 - 2. TEHNOLOGII MODERNE DE DETECTARE
numrarea vehiculele care ateapt la linia de stop, datorit particularitii timpului iniial
suplimentar. Aceasta realizeaz, de asemenea, alegerea programului pentru a reduce
intervalele admisibile dintre vehiculele care ateapt pe durata semnalului rou pe faz
urmtoare.
Pentru interseciile izolate este utilizat frecvent un mesaj variabil pregtete s opreti
n special cnd vizibilitatea este sczut sau pentru situaiile speciale cauzate de starea
vremii (cea sau strlucirea soarelui).
Acest mesaj este utilizat i n locurile unde geometria drumului nu permite observarea,
la timp, a semnalului de trafic i astfel, nu este asigurat securitatea rutier. n anumite
situaii prin folosirea mesajelor de tipul trece ultimul vehicul atunci cnd exist controlere
de densitate, pot fi identificate intervalele dintre vehicule. Astfel, se permite ultimului
vehicul din pluton s treac pe durata semnalului i se acord, urmtorului vehicul,
suficient timp pentru a opri. Figura 3.24. prezint o schem general pentru o astfel de
aplicaie.
Figura 3.24. Sistem de detectare pentru pregtirea opririi vehiculelor.
n mod frecvent, n cazul perioadelor de vrf, conductorii auto vor folosi drumurile din
zonele rezideniale paralele cu arterele principale pentru a scurta drumul parcurs sau
pentru a evita aglomeraiile. Rezidenii consider, n mod normal c sigurana copiilor este
n pericol.
Pentru a supravegherea zonele rezideniale, inginerii de trafic folosesc diferite mijloace
de control cum ar fi: semne de stop sau semnale de avertizare, semnale de trafic
coordonate cu impunerea respectrii unei viteze precise de deplasare. Muli conductori
auto ignor anumite semne de circulaie, ca i restriciile de vitez, ceea ce a determinat
inginerii de trafic s foloseasc dou buclele detectoare pentru msurarea vitezei, la
aproximativ 54 m de intersecie. Aceste bucle msoar viteza - sau mai precis, timpul
necesar parcurgerii distanei dintre bucle pentru un vehicul care se apropie i produce
un apel n controler, numai dac, vehiculul se deplaseaz sub viteza limit.
Presupunnd c semnalul rmne pe rou pe toate cele patru direcii i, dac vehiculul
nu are vitez mare, se afieaz un semnal de verde i conductorul auto poate s-i
continue micarea prin intersecie fr a fi ntrziat. Dac, pe de alt parte, vehiculul care
se apropie a depit viteza limit, nu se nregistreaz nici un apel i conductorul trebuie
s ncetineasc pn cnd ajunge la bucla de lng intersecie. n acel moment se
nregistreaz apelul i va fi activat intervalul de verde.
Cu acest sistem, un vehicul care traverseaz prima bucl, declaneaz un dispozitiv
de comand i se iniiaz un apel. Dac viteza vehiculului este destul de sczut,
intervalul predeterminat este meninut nainte ca vehiculul s ajung la cea de-a doua
bucl. Atunci apelul va fi transmis spre controler.
70
MODULUL 3 - 2. TEHNOLOGII MODERNE DE DETECTARE
Cnd vehiculul ajunge la cea de-a doua bucl, este resetat dispozitivul de temporizare,
i este anulat orice apel reinut anterior. Astfel, un vehicul depind limita legal nu va fi
niciodat detectat de bucla avansat i fiecare vehicul succesiv este temporizat
independent. Aceast metod este simpl, economic, uor de ajustat i nu depinde de
mrimea i lungimea vehiculului.
Intervalul n timp dintre bucla de iniiere i bucla avansat de resetare, este de
aproximativ de 1 secund de deplasare cu viteza limit.
Distana de la bucla avansat la prima bucl din intersecie este predeterminat innd
cont de cea mai mic valoare a vitezei (n mod obinuit 32 km/h) i intervalul maxim al
timpului de trecere dorit (4 secunde). Distana minim, de la linia de stop la detectorul
avansat, este determinat lund n considerare un timp de reacie confortabil i distana
de oprire corespunztoare vitezei de proiectare.
3.9. ALTERNATIVE DE PROIECTARE A BUCLELOR DETECTOARE
Pentru nelegerea corect a tipurilor de detectori trebuie specificat faptul c,
detectarea pe suprafee mici se refer la detectarea punctual sau detectarea trecerii, iar
detectarea pe suprafee mari se refer la detectarea pe zone sau detectarea prezenei.
Buclele inductive pot fi folosite n ambele cazuri.
Detectorii magnetici pot fi folosii doar la detectare punctual, deoarece, ei acoper o
arie mic i necesit micarea vehiculului (trecerea) pentru a activa sistemul.
Magnetometrele sunt n principal detectori punctuali, dar pot fi folosii ca detectori pe
suprafa prin utilizarea senzorilor multipli, pentru acoperirea zonei de detectare.
3.9.1. DETECTAREA PE SUPRAFEE MICI
Se realizeaz, n mod obinuit, cu o singur bucl, scurt. Literatura de specialitate
definete ca bucl scurt, bucla care are lungimea sub 6 m, dar cea mai utilizat bucl
pentru o band cu limea de 3,6 m este (1,8 x 1,8 m). Pentru a evita interferena, pentru
benzile nvecinate se folosesc bucle de tipul (1,5 x 1,5 m). Bucle mici nu sunt
recomandate n zonele n care trebuie detectate continuu vehicule cu caroserie nalt.
Tip bucl Tip bucl Tip bucl
Ptrat
Dreptunghi
Octogon
Cerc
Romb
Triunghi
Galon
Cvadripol
Galon
modificat
Hexagon
Paralelogram
Figura 3.25. Forma buclelor mici.
71
MODULUL 3 - 2. TEHNOLOGII MODERNE DE DETECTARE
O bucl scurt este destinat detectrii vehiculelor unui flux ce se apropie de linia de
stop. Cnd un vehicul trece peste o bucl detectoare, un apel este trimis spre un controler.
Durata semnalului de verde este n mod obinuit bazat pe un program prestabilit
pentru funcionarea controlerului i nu pe intervalul de timp ct zona de detectare este
ocupat de vehiculele ce se apropie de intersecie. n cele mai multe cazuri, controlerul
opereaz cu blocarea circuitelor memoriei de detectare pentru a asigura apelarea fazei
potrivite.
Buclele detectoare scurte pot fi utilizate ntr-o varietate de moduri i pot fi localizate la
distane diferite fa de linia de stop, funcie de cerinele operaionale.
Tip A Tip B
Tip C Tip D
Figura 3.26. Exemplificarea reprezentrii buclelor.
O aplicaie tipic const din una sau mai multe bucle scurte, amplasate n apropierea
liniei de stop, n accesul cu semnale actualizate al unei intersecii cu viteze de acces
sczute. O alt aplicaie este amplasarea unui numr din aceste bucle, suficient de
departe nainte de linia de stop, pentru a aciona ca detectori de extindere a n cazul
intrrilor cu viteze mari.
Forma buclelor a constituit subiectul unor cercetri ample efectuate nc din anii 1980.
Cercetrile privind posibilitile de a detecta toate categoriile de vehicule, de la biciclete i
72
MODULUL 3 - 2. TEHNOLOGII MODERNE DE DETECTARE
motociclete la autocamioanele de mare tonaj (n timp ce se impune evitarea detectrii
vehiculelor de pe benzile adiacente), au condus la proliferarea dispozitivelor de acest fel.
n figura 3.25 sunt prezentate exemple pentru diferite forme de bucle. Cteva dintre
acestea sunt bine cunoscute, n timp ce altele au fost dezvoltate doar pentru locaii
specifice sau pentru a detecta o anumit categorie de vehicule.
Specialiti din universiti i institute de cercetare au efectuat teste pentru
determinarea formei optime a unei bucle, prin instalarea mai multor categorii, testarea i
compararea sensibilitii buclelor n detectarea diferitelor tipuri de vehicule test. n multe
cazuri, diferenele de sensibilitate nu au fost semnificative, dar au oferit studii despre
stadiul actual privind unitile electronice de detectare.
Buclele detectoare au primit, n timp, diferite simboluri ce definesc precis o anumit
dimensiune i form de bucl (tip A, pentru bucla ptrat 1,8 x 1,8m, etc), aa cum este
prezentat n figura 3.26, cu exemplificare pentru statul California.
3.9.2. DETECTAREA PE SUPRAFEE MARI
Detectarea pe suprafee mari const n detectarea pe zone ce acoper cel puin 6
metri lungime pe banda de circulaie. n primul rnd, este cazul detectrii prezenei prin
care este nregistrat prezena unui vehicul, ct timp zona este ocupat.
Acest concept utilizeaz n mod obinuit o singur bucl cuprinznd toat zona de
detecie. De altfel, bucla lung, ca entitate, poate fi nlocuit de o succesiune de bucle
scurte. n literatura de specialitate, termenul de bucl lung are semnificaia de o singur
bucl lung sau bucle mici multiple, acionnd ca o bucl lung.
3.9.2.1. Buclele lungi
Bucla lung obinuit are o lime de 1,8 m i o lungime de 6 m - 24 m. Figura 3.27
prezint diferite forme de bucle lungi. Aceste bucle au, n general, una sau dou ntoarceri
ale conductorului.
Figura 3.27. Bucle lungi.
Dac buclele dreptunghiulare, paralelogram sau trapezoidale trebuie s asigure
detectarea tuturor vehiculelor rutiere, nivelul de sensibilitate se alege la o valoare ridicat,
n caz contrar vor detecta vehiculele de pe benzile alturate. Bucla cvadripol este potrivit
pentru a elimina acest neajuns, datorit limitrii nlimii cmpului lor; aceasta poate avea
dificulti n detectarea continu a vehiculelor cu nlime mare. Bucla cvadripol reprezint
varianta optim pentru detectarea roilor i punilor. Lungimile asociate buclelor lungi
sporesc vulnerabilitatea la defectare cauzat de fisurile n mbrcmintea rutier i
micarea combinat.
Buclele lungi ofer posibilitatea de control al intrrii, numite controlul ocuprii buclei
Astfel, intervalul de verde minim sau intervalul iniial este stabilit la valoarea zero sau,
aproape de valoarea zero, iar timpul de trecere este intervalul vehiculului sau este stabilit
la cel mai scurt interval, ca n figura 3.22. Cnd este afiat semnalul de verde pe o faz,
73
MODULUL 3 - 2. TEHNOLOGII MODERNE DE DETECTARE
aceasta va continua ct timp bucla este ocupat, dar nu mai mult dect timpul maxim de
verde. Semnalul de galben, pentru schimbarea fazei, apare imediat ce bucla este
evacuat, timpul de trecere a expirat i nu exist un alt apel, pe durata trecerii ultimului
vehicul care a ocupat bucla.
Lungimea buclei reprezint o mrime critic care poate garanta operarea corect a
controlerului. Este important ca vehiculul urmritor s poat frna n condiii de siguran
dac semnalul de galben apare nainte ca acesta s ocupe bucla sau, s-i poat
continua deplasarea, pe durata acestui semnal. n cazul n care n fluxul de trafic exist i
vehicule grele, pot aprea probleme. Autoturismele situate n faa unui camion pot
accelera i evacua detectorul nainte ca acesta s accelereze i s ocupe bucla.
Analiza corelaiei existente ntre lungimea detectorului, intervalele dintre vehicule i
timpul de verde maxim pentru viteze de deplasare inferioare valorii de 56 km/h, peste care
apare problema zonei de dilem, permite determinarea combinaiei optime pentru
anumite condiii de trafic (tria traficului pe o band de circulaie, distribuia traficului pe
benzi, variaia n timp a valorilor de trafic).
Figura 3.28. Configuraii ale buclelor secveniale (dimensiuni exprimate n metri).
Se pot obine performane satisfctoare pentru o lungime a detectorilor de 25 m.
Pentru o combinaie a fluxurilor critice de trafic (valorile maxime corespunztoare fiecrei
faze de circulaie) inferioare volumului de 1100 vehiculele/or, pot fi folosite bucle de 20
m. Pentru volume sub 900 vehicule/or, folosirea buclelor de 15 m, fa de buclele de 25
m poate provoca o ntrziere de 2 secunde/vehicul. Pentru combinaii ale volumelor critice
mai mici dect 600 vehicule/or, pot fi folosite bucle de 9 m, n locul celor de 25 m, fr a
se nregistra ntrzieri excesive.
Figura 3.29. Serii de bucle scurte.
74
MODULUL 3 - 2. TEHNOLOGII MODERNE DE DETECTARE
3.9.2.2. Bucle secveniale scurte
n anumite situaii este preferabil utilizarea buclelor scurte, legate n serie, ce pot
substitui o bucl lung. Avantajul acestei soluii const n faptul c acestea sunt mai
fiabile, datorit lungimii mai mici i deci solicitrii, mai reduse, de ctre vehicule. n plus,
buclele mici permit o detectare mai bun a vehiculelor mici. n mod obinuit aceast
soluie const din patru bucle ptrate de 1,8 x 1,8 m sau din bucle rombice ca cele
prezentate n figura 3.28. Figura 3.29 prezint un exemplu de amplasare a buclelor scurte
ntr-o intersecie. Distanele ntre seriile de bucle necesit, n mod obinuit, un timp de
trecere sau intervale dintre vehicule mai mari dect zero, pentru a garanta o operare
corespunztoare.
3.9.2.3. Bucle pentru detectarea vehiculelor care vireaz la stnga.
Detectorii de vehicule pentru benzile destinate virajului la stnga pot afecta capacitatea
interseciei, prin reducerea timpilor de verde, care nu sunt utilizai. Amplasarea i
caracteristicile lor trebuie s ia n considerare, att caracteristicile vehiculelor care vireaz,
ct i intervalele de succesiune dintre vehicule. Figura 3.30 ilustreaz o metod pentru
amplasarea acestor bucle detectoare.
Figura 3.30. Procedura de detectare a vehiculelor care vireaz la stnga.
Cnd virajul la stnga necesit lungimi de stocaj mai mari de 45 m sau cnd viteza de
acces necesit benzi de deceleraie, se impune prezena unei bucle de detectare
amplasate n avans, care va extinde zona efectiv de detecie pentru a rspunde cererii
vehiculelor grele sau traficului rapid.
3.9.2.4. Detectarea traficului pe direcia nainte
Detectarea vehiculelor de pe benzile destinate traficului ce traverseaz intersecia,
depinde de viteza de deplasare a fluxului ca i de tipul de operare al controlerului. Poate fi
folosit detectare ntr-un punct, o bucl lung, combinaii de bucle scurte sau bucle scurte
legate n serie.
Detectarea ntr-un punct
Reprezint cea mai simpl form de detectare folosit pentru controlerele cu semnale
actualizate, n special n cazul vitezelor de acces sczute, sub 56 km/h. Pot fi folosite, de
asemenea, pe intrrile laterale ale interseciilor ce folosesc alt form de detecie a
traficului de pe intrrile principale.
Un punct de detectare este localizat la o distan parcurs n 2 pn la 4 secunde n
faa liniei de stop.
75
MODULUL 3 - 2. TEHNOLOGII MODERNE DE DETECTARE
Dac este singurul detector de pe banda de acces, controlerul trebuie s fie setat
pentru a lua n considerare acest apel.
d l
L
N
+
= (3.1)
Lungimea zonei de detectare, L mprit la 7,6 m (lungimea medie a unui vehicul, l
plus intervalul dintre vehiculele succesive, d indic numrul de vehicule, N care sunt
niruite ntre detector i linia de stop cnd semnalul se schimb n verde. Aceast valoare
este folosit pentru a stabili setrile controlerului pentru timpul de verde minim. Distana
dintre detector i linia de stop mprit la procentul de 15% al vitezelor, reprezint o
estimare potrivit pentru timpul de trecere. Acest timp de trecere reprezint, de asemenea,
intervalul admisibil pentru care se pierde semnalul de verde. Dac setarea controlerului
este mai mare sau mai mic dect un interval acceptabil sau admisibil, poziia
detectorului trebuie schimbat pentru a asigura o mrime potrivit a intervalului dintre
vehicule.
3.9.2.5. Detectarea ocuprii buclei
Acest tip de detectare este utilizat, n special, n cazul vitezelor de acces mici. Const,
n principal, ntr-o singur bucl avnd lungimea de 15 m sau mai mult sau dintr-o
succesiune de bucle scurte, de obicei patru, amplasate imediat naintea liniei de stop.
Aceste bucle lucreaz corect n cazul vitezelor mai mici de 40 km/or. Chiar la aceste
viteze exist posibilitatea ca, un vehicul care accede n intersecie, s treac peste
detector la apariia semnalului de galben. n aceste situaii vehiculul va traversa intersecia
pe durata semnalului galben. Dac vitezele cresc, lungimea zonei de detectare trebuie s
creasc proporional pentru a corespunde distanelor de oprire mai mari. Tabelul 3.4
prezint lungimea zonei de detectare funcie de viteza de acces n interseciei.
Tabelul 3.4. Lungimea de detectare.
Viteza de acces, km/h Lungime de detectare, m
48 37
56 49
64 61
72 76
De exemplu, zona de detectare este msurat de la linia de stop i const din dou
bucle de 17 m. Dac sunt necesare zone mai lungi, se vor utiliza fie bucle suplimentare fie
bucle mici. Dac se folosesc bucle mici acestea trebuie conectate separat la unitatea de
detectare i programarea timpului de extensie. Buclele lungi sunt setate n modul
PREZEN.
3.9.2.6. Detectarea n puncte cu viteze ridicate
Pentru accesele n care vehiculele acced cu viteze ridicate (superioare valorii de 48
km/h), detectarea este mult mai complicat. Metoda folosit frecvent se bazeaz pe
controlul de tip volum-densitate folosind o bucl pentru fiecare band. Acest punct de
detectare este amplasat naintea liniei de stop, la distane corespunztoare unei durate a
deplasrii de cel puin 5 secunde pn la cel mult 8 - 10 secunde.
Acest detector este activ n orice moment, mai puin pe durata semnalului galben. Pe
durata semnalului de rou, fiecare acionare produce creterea timpului iniial variabil.
Dup ce timpul iniial variabil depete timpul de verde minim, fiecare acionare
prelungete intervalul iniial. Pe durata intervalului de verde, detectorul acioneaz pentru
extinderea semnalului de verde. La nceput extensia este egal cu timpul de trecere, dar
dup nregistrarea unui apel pentru faza urmtoare, extensia este redus, ajungnd
eventual pn la intervalul minim dintre vehicule. n cazul vitezelor de acces mari analiza
ce trebuie realizat se refer la apariia zonei de dilem.
76
MODULUL 3 - 2. TEHNOLOGII MODERNE DE DETECTARE
TEST 4
1. Enumerai criteriile de alegere a tehnologiilor de detectare?
2.Reprezentai elementele unui plan de semaforizare actualizat.
3. Ce nelegei prin interval de verde minim sau maxim?
4. Ce nelegei prin intrri de vitez mic
5.Ce nelegei prin zona de dilem?
6.Prezentai tipurile cunoscute de bucle detectoare inductive.
7. Care sunt aplicaiile n care sunt folosite buclele lungi?
8.Dar buclele scurte?
9.Exemplificai modul de instalarea detectorilor bucl inductiv ntr-o intersecie cu
patru intrri.
10. Ce nelegei prin bucle secveniale?
77
You might also like
- Tabel ParodontiteDocument5 pagesTabel ParodontiteAnghelescu-Topliceanu Georgiana AndreeaNo ratings yet
- Normativ C56 2002Document194 pagesNormativ C56 2002Denes LazarNo ratings yet
- 08rom - Minipiloti Din Amestec Uscat Din Ciment, Var Si NisipDocument7 pages08rom - Minipiloti Din Amestec Uscat Din Ciment, Var Si NisipAnghelescu-Topliceanu Georgiana AndreeaNo ratings yet
- Ordin 1276 Din 2005Document11 pagesOrdin 1276 Din 2005Anghelescu-Topliceanu Georgiana AndreeaNo ratings yet
- Pte 05 P InjectiiDocument3 pagesPte 05 P InjectiiAnghelescu-Topliceanu Georgiana AndreeaNo ratings yet
- 26 116 Ne 030 2004Document15 pages26 116 Ne 030 2004Anghelescu-Topliceanu Georgiana AndreeaNo ratings yet
- Tutorial Inginerie 2008Document295 pagesTutorial Inginerie 2008gogu8No ratings yet
- Normativ Poduri Podete TubulareDocument138 pagesNormativ Poduri Podete Tubulareluk2008100% (1)
- Lucrari de Aparare MalDocument22 pagesLucrari de Aparare MalRoxana Iovu100% (4)
- Caiet de Sarcini Nisip Natural 0-4Document2 pagesCaiet de Sarcini Nisip Natural 0-4Munteanu MonicaNo ratings yet
- Cereri AutorizaţiiDocument4 pagesCereri AutorizaţiiAnghelescu-Topliceanu Georgiana AndreeaNo ratings yet
- NP 133-2013-Alim Cu Apa Si CanalizariDocument273 pagesNP 133-2013-Alim Cu Apa Si CanalizariAnonymous 87xpkIJ6CF100% (5)
- Manualul de Sanitare 2010 PDFDocument558 pagesManualul de Sanitare 2010 PDFAnghelescu-Topliceanu Georgiana AndreeaNo ratings yet
- ORDONANŢA Nr. 15 Din 23 Ianuarie 1996 Privind Întărirea Disciplinei Financiar-Valutare Autor: Compania de Informatică NeamţDocument3 pagesORDONANŢA Nr. 15 Din 23 Ianuarie 1996 Privind Întărirea Disciplinei Financiar-Valutare Autor: Compania de Informatică NeamţAnghelescu-Topliceanu Georgiana AndreeaNo ratings yet
- Manualul de Sanitare 2010 PDFDocument558 pagesManualul de Sanitare 2010 PDFAnghelescu-Topliceanu Georgiana AndreeaNo ratings yet
- Ghid Deseuri Constructii Si DemolariDocument142 pagesGhid Deseuri Constructii Si Demolaricosminacostea11No ratings yet
- And 504-2007Document16 pagesAnd 504-2007IoanSNo ratings yet
- Functiunea ConturilorDocument67 pagesFunctiunea ConturilordeschideochiiNo ratings yet
- PTE 04 P-C Fundatii PilotiDocument3 pagesPTE 04 P-C Fundatii PilotiAnghelescu-Topliceanu Georgiana AndreeaNo ratings yet
- 03 Indrum PROI BA Nagy-Gyorgy T 2013-04-09-LibreDocument67 pages03 Indrum PROI BA Nagy-Gyorgy T 2013-04-09-LibreAnghelescu-Topliceanu Georgiana AndreeaNo ratings yet
- Ordin 617 - 2007Document17 pagesOrdin 617 - 2007Anghelescu-Topliceanu Georgiana AndreeaNo ratings yet
- Lege380 2005Document83 pagesLege380 2005Anghelescu-Topliceanu Georgiana AndreeaNo ratings yet
- Lege380 2005Document83 pagesLege380 2005Anghelescu-Topliceanu Georgiana AndreeaNo ratings yet
- Og 92 - 2003Document108 pagesOg 92 - 2003Anghelescu-Topliceanu Georgiana AndreeaNo ratings yet
- Ciolan Preda Dinamica Autovehiculelor I Curs IFR 2009Document77 pagesCiolan Preda Dinamica Autovehiculelor I Curs IFR 2009Necula Andrei100% (1)
- Cs PoduriDocument79 pagesCs PoduriAnghelescu-Topliceanu Georgiana AndreeaNo ratings yet
- PTE 09 P - C Montare AP ReazemDocument4 pagesPTE 09 P - C Montare AP ReazemAnghelescu-Topliceanu Georgiana AndreeaNo ratings yet
- Pte 04 1Document3 pagesPte 04 1Anghelescu-Topliceanu Georgiana AndreeaNo ratings yet
- PTE - 01D Sapatura Cap.2010Document3 pagesPTE - 01D Sapatura Cap.2010Anghelescu-Topliceanu Georgiana AndreeaNo ratings yet
- PTE - 02D - Umpluturi 2009 Cap.Document3 pagesPTE - 02D - Umpluturi 2009 Cap.Anghelescu-Topliceanu Georgiana AndreeaNo ratings yet