You might also like
- Howard JohnsonDocument6 pagesHoward JohnsonDanny DurhamNo ratings yet
- Qnergy The PCK80 Brochure Spec SheetDocument2 pagesQnergy The PCK80 Brochure Spec SheetDanny DurhamNo ratings yet
- Abrasive Pulsed Waterjet Study and ApplicationsDocument9 pagesAbrasive Pulsed Waterjet Study and ApplicationsDanny DurhamNo ratings yet
- CNC Waterjet Cutting Machine SpecificationsDocument1 pageCNC Waterjet Cutting Machine SpecificationsDanny DurhamNo ratings yet
- 01 - Basic Electricity - Part 1Document9 pages01 - Basic Electricity - Part 1Maria ClaytonNo ratings yet
- Demagnetization Tests Performed On A Linear Alternator For A Stirling Power ConvertorDocument10 pagesDemagnetization Tests Performed On A Linear Alternator For A Stirling Power ConvertorDanny DurhamNo ratings yet
- A Stirling-Rankine Fuel-Fired Heat PumpDocument9 pagesA Stirling-Rankine Fuel-Fired Heat PumpDanny DurhamNo ratings yet
- Growatt SPF5000-3000Document2 pagesGrowatt SPF5000-3000Danny DurhamNo ratings yet
- Performance Characterization of Sunpower Free-Piston Stirling EnginesDocument6 pagesPerformance Characterization of Sunpower Free-Piston Stirling EnginesDanny DurhamNo ratings yet
- Investigation of AC Loss of Permanent Magnet of SPM Motor Considering Hysteresis and Eddy-Current LossesDocument5 pagesInvestigation of AC Loss of Permanent Magnet of SPM Motor Considering Hysteresis and Eddy-Current LossesDanny DurhamNo ratings yet
- Free Piston Stirling Engine For Rural DevelopmentDocument5 pagesFree Piston Stirling Engine For Rural DevelopmentDanny DurhamNo ratings yet
- Photocatalytic Hydrogen Production Using Clinoptilolite-Supported, Eosin Y-Sensitized Tio FOR Water SplittingDocument4 pagesPhotocatalytic Hydrogen Production Using Clinoptilolite-Supported, Eosin Y-Sensitized Tio FOR Water SplittingDanny DurhamNo ratings yet
- Measurement and Application of Performance Characteristics of A Free Piston Stirling CoolerDocument9 pagesMeasurement and Application of Performance Characteristics of A Free Piston Stirling CoolerDanny DurhamNo ratings yet
- Silicagel-Water Adsorption Cooling Prototype System For Mobile Air ConditioningDocument13 pagesSilicagel-Water Adsorption Cooling Prototype System For Mobile Air ConditioningDanny DurhamNo ratings yet
- Permanent Magnet (De-) Magnetization 2.1 MethodologyDocument6 pagesPermanent Magnet (De-) Magnetization 2.1 MethodologyDanny DurhamNo ratings yet
- Analysis of Motor Loss in Permanent Magnet Brushless MotorsDocument6 pagesAnalysis of Motor Loss in Permanent Magnet Brushless MotorsDanny DurhamNo ratings yet
- Aluminium: Extruded Sections Square BarDocument1 pageAluminium: Extruded Sections Square BarDanny DurhamNo ratings yet
- Linear Motor Research at Purdue UniversityDocument7 pagesLinear Motor Research at Purdue UniversityDanny DurhamNo ratings yet
- Electricity Tariffs 2018 2019Document7 pagesElectricity Tariffs 2018 2019Danny DurhamNo ratings yet
- Property Rates Tariffs 2018 2019Document2 pagesProperty Rates Tariffs 2018 2019Danny DurhamNo ratings yet
- 2017 NSC Timetable TimetableDocument2 pages2017 NSC Timetable TimetableeNCA.comNo ratings yet
- 2407 P Eng A4 PDFDocument4 pages2407 P Eng A4 PDFDanny DurhamNo ratings yet
- 1490-Cleaning of Steel and Removal of SaltsDocument8 pages1490-Cleaning of Steel and Removal of SaltsjasminneeNo ratings yet
- General Brochure - SB Series (A4)Document5 pagesGeneral Brochure - SB Series (A4)Danny DurhamNo ratings yet
- BK3251 BekenDocument13 pagesBK3251 BekenDanny DurhamNo ratings yet
- 73 PDFDocument9 pages73 PDFDanny DurhamNo ratings yet
- Dts 0094Document7 pagesDts 0094Danny DurhamNo ratings yet
- Dehumidifi Er RECUSORB RZ-081/101/102Document2 pagesDehumidifi Er RECUSORB RZ-081/101/102Danny DurhamNo ratings yet
- 2407 P Eng A4 PDFDocument4 pages2407 P Eng A4 PDFDanny DurhamNo ratings yet
- BS en 1092Document21 pagesBS en 1092Pranay Kharbe100% (5)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Pump (English) TemplateDocument1 pagePump (English) TemplateMichael HaiseNo ratings yet
- Optimal Foundation Solution For Storage Terminal in MangaloreDocument4 pagesOptimal Foundation Solution For Storage Terminal in MangalorelingamkumarNo ratings yet
- Module 1 - National Building Code of The Philippines - Part 1Document37 pagesModule 1 - National Building Code of The Philippines - Part 1Rovic VincentNo ratings yet
- Colonial America Architectural StylesDocument34 pagesColonial America Architectural StylesJohn Michael AlocNo ratings yet
- Handbook On GeotextileDocument106 pagesHandbook On GeotextileAnonymous MAQrYFQDzV100% (2)
- Research Paper Proposal TemplateDocument3 pagesResearch Paper Proposal TemplatePablo MoralesNo ratings yet
- Chapter 1 - Bill of QuantitiesDocument27 pagesChapter 1 - Bill of QuantitiesAmin SardariNo ratings yet
- My Central Kentucky Real Estate September 2011Document115 pagesMy Central Kentucky Real Estate September 2011yourtownNo ratings yet
- Sachpazis Raft Foundation Design Analysis Design For Multistorey Building. Calculation According To Bs 8110-1-1997Document14 pagesSachpazis Raft Foundation Design Analysis Design For Multistorey Building. Calculation According To Bs 8110-1-1997sitheeqNo ratings yet
- Five Steps To Resolving Construction Disputes - Without Litigation (Sheen, 1994)Document3 pagesFive Steps To Resolving Construction Disputes - Without Litigation (Sheen, 1994)Kimmy LeeNo ratings yet
- ES0153-75440100-DBR-0003 Dust ExtractionDocument19 pagesES0153-75440100-DBR-0003 Dust Extractionraaj bharathNo ratings yet
- WMM Construction & Quality ControlDocument8 pagesWMM Construction & Quality ControlRAMPALLI GATTAIAHNo ratings yet
- Project Management in ConstructionDocument9 pagesProject Management in Constructionvineeth reddyNo ratings yet
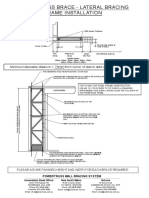
- PT Brace Installation 1Document1 pagePT Brace Installation 1Tony PedaNo ratings yet
- Canadian Foundation ManualDocument10 pagesCanadian Foundation Manualbenchowdry9615No ratings yet
- Construction Site Visit OverviewDocument12 pagesConstruction Site Visit OverviewCaereel LopezNo ratings yet
- Cross-Section Properties of IPN 300 Steel BeamDocument2 pagesCross-Section Properties of IPN 300 Steel BeamFilip StojkovskiNo ratings yet
- Bike Camper Plans by DrewBuildsStuff v2 5-30-22Document6 pagesBike Camper Plans by DrewBuildsStuff v2 5-30-22Márcio GhrollNo ratings yet
- Zinc-Coated Steel Strand For Messenger Support of Figure 8 CableDocument3 pagesZinc-Coated Steel Strand For Messenger Support of Figure 8 CableSha ZhaNo ratings yet
- Construction and Building Materials: Chi-Cong Vu, Olivier Plé, Jérôme Weiss, David AmitranoDocument21 pagesConstruction and Building Materials: Chi-Cong Vu, Olivier Plé, Jérôme Weiss, David Amitranochristian ricaldi100% (1)
- H Beam Sizes Weight ChartDocument8 pagesH Beam Sizes Weight Chartsubodh kumar shahNo ratings yet
- Structural Notes and DetailsDocument1 pageStructural Notes and DetailsMohammad AlkahteebNo ratings yet
- Mat UrbanismDocument11 pagesMat UrbanismBadr ZeinaNo ratings yet
- Technical Guideline TCG 006BDocument12 pagesTechnical Guideline TCG 006BrakhbirNo ratings yet
- Wire Rope GuideDocument30 pagesWire Rope GuideAnonymousNo ratings yet
- VILLA 430: Hyderabad, TelanganaDocument27 pagesVILLA 430: Hyderabad, TelanganaH A I K U S T U D I ONo ratings yet
- amm 467 349Document6 pagesamm 467 349Dinesh JagadisanNo ratings yet
- Machine Design - Introduction PDFDocument13 pagesMachine Design - Introduction PDFDida KhalingNo ratings yet
- WRE - 412 - Lec01 - Introduction To Hydraulic StructuresDocument40 pagesWRE - 412 - Lec01 - Introduction To Hydraulic StructuresAzwad Abeer100% (1)