You might also like
- Conceptos generales para la descripción y evaluación de los riesgos por carga físicaFrom EverandConceptos generales para la descripción y evaluación de los riesgos por carga físicaRating: 5 out of 5 stars5/5 (1)
- Norma Técnica Colombiana NTC 5693-1Document2 pagesNorma Técnica Colombiana NTC 5693-1sulay beltranNo ratings yet
- MF1328_1: MANIPULACIÓN Y MOVIMIENTOS CON TRANSPALÉS Y CARRETILLAS DE MANO (COMT0211)From EverandMF1328_1: MANIPULACIÓN Y MOVIMIENTOS CON TRANSPALÉS Y CARRETILLAS DE MANO (COMT0211)No ratings yet
- Iso 11228Document4 pagesIso 11228Orlando Pedrazas SaavedraNo ratings yet
- Prevención y seguridad en el montaje mecánico e hidráulico de instalaciones solares térmicas. ENAE0208From EverandPrevención y seguridad en el montaje mecánico e hidráulico de instalaciones solares térmicas. ENAE0208No ratings yet
- Metodo NIOSHDocument10 pagesMetodo NIOSHByronNo ratings yet
- Prevención de riesgos profesionales y seguridad en el montaje de instalaciones solares. ENAE0108From EverandPrevención de riesgos profesionales y seguridad en el montaje de instalaciones solares. ENAE0108No ratings yet
- L2 13 GT Evaluacion Prevencion Riesgos Cargas InsstDocument8 pagesL2 13 GT Evaluacion Prevencion Riesgos Cargas InsstIsela Recillas CruzNo ratings yet
- Riesgos Ergonomicos PDFDocument21 pagesRiesgos Ergonomicos PDFWendy E0% (1)
- Consulta Iso 11228 3 1 FinalDocument4 pagesConsulta Iso 11228 3 1 FinalFranklinPerezPozo100% (1)
- Snook y CierielloDocument16 pagesSnook y CierielloJhoan MárquezNo ratings yet
- Evaluación Del Riesgo Por Levantamiento de Cargas. INSHTDocument8 pagesEvaluación Del Riesgo Por Levantamiento de Cargas. INSHTDiego PerezNo ratings yet
- GinshtDocument17 pagesGinshtEDGAR ALONSO FELIX MENDIVILNo ratings yet
- Método REBA para evaluar riesgos posturalesDocument5 pagesMétodo REBA para evaluar riesgos posturalesAngeline Henao BohorquezNo ratings yet
- Práctica 7 Niosh Equipo ViernesDocument19 pagesPráctica 7 Niosh Equipo ViernesGABRIELA ARACELY OSUNA PEREZNo ratings yet
- Guia NioshDocument20 pagesGuia NioshRosana Rizzo OliveraNo ratings yet
- Manipulación manual cargasDocument54 pagesManipulación manual cargasLutty Asdrubal33% (3)
- Levantamiento de Carga PDF Iso 11228-1Document17 pagesLevantamiento de Carga PDF Iso 11228-1Zuley Torrenegra67% (3)
- Resumen Metodo Snook y Cirello.Document3 pagesResumen Metodo Snook y Cirello.Nidia Vivero SoteloNo ratings yet
- Método GINSHT ListoDocument13 pagesMétodo GINSHT ListoKevin Estiven Espin EspinNo ratings yet
- Factores de Riesgo Ergonómico Manejo CargasDocument10 pagesFactores de Riesgo Ergonómico Manejo CargasJesus Alejandro Santiago GuillenNo ratings yet
- Unidad 2 - Sesion 5 - Peligros y Riesgos ErgonomicosDocument20 pagesUnidad 2 - Sesion 5 - Peligros y Riesgos ErgonomicosJennifer Elizabeth Nina VargasNo ratings yet
- Fundamento MÉTODO GINSHTDocument13 pagesFundamento MÉTODO GINSHTAnonymous vmw7z1WHmNo ratings yet
- 5-Metodo NIOSHDocument5 pages5-Metodo NIOSHv_cerda86No ratings yet
- Método GinshtDocument22 pagesMétodo GinshtSolo JC Sin Nada MasNo ratings yet
- Universidad Nacional de IngenieriaDocument18 pagesUniversidad Nacional de IngenieriaELISA MARIBEL ALVIS CAHUANANo ratings yet
- Evaluación de Riesgos ErgonómicosDocument12 pagesEvaluación de Riesgos ErgonómicosisraelNo ratings yet
- Estudio de Caso Asignatura ERGONOMIADocument3 pagesEstudio de Caso Asignatura ERGONOMIAjuan castañedaNo ratings yet
- Ecuacion Del NioshDocument9 pagesEcuacion Del NioshPaola AcostaNo ratings yet
- GINSHTDocument12 pagesGINSHTJorge HidalgoNo ratings yet
- Rojas GinshtDocument28 pagesRojas GinshtIsmael FgNo ratings yet
- Las Normas ISO 11228 en El Manejo Manual de CargasDocument11 pagesLas Normas ISO 11228 en El Manejo Manual de CargasAlexandra MejiaNo ratings yet
- Ecuación Niosh - Manejo de CargaDocument54 pagesEcuación Niosh - Manejo de CargaRené Gerardo Sosa MonterrosaNo ratings yet
- Carga física jardinería: evaluación riesgos y medidasDocument6 pagesCarga física jardinería: evaluación riesgos y medidasfronendNo ratings yet
- Tablas de Snook y CiriellDocument16 pagesTablas de Snook y CiriellVirna JessicaNo ratings yet
- Métodos ErgonómicosDocument8 pagesMétodos ErgonómicosArcel EzcurraNo ratings yet
- ErgonomiaDocument11 pagesErgonomiaLina Marcela Mongui TorresNo ratings yet
- Las Normas ISO 11228 en El Manejo Manual de CargasDocument17 pagesLas Normas ISO 11228 en El Manejo Manual de CargasingenieroaggNo ratings yet
- METODO NIOSH ErgonomiaDocument14 pagesMETODO NIOSH Ergonomiamartin_1694No ratings yet
- TP N°1 ErgonomiaDocument14 pagesTP N°1 ErgonomiaSebastian MolinaNo ratings yet
- Práctica 7 CORREGIDA Niosh Equipo 3Document23 pagesPráctica 7 CORREGIDA Niosh Equipo 3GABRIELA ARACELY OSUNA PEREZNo ratings yet
- Clase 3-Norma ErgonomicaDocument61 pagesClase 3-Norma ErgonomicaUnidad de Posgrado - FII - UNMSMNo ratings yet
- Ejercicios Tema 4 y 5Document5 pagesEjercicios Tema 4 y 5Guillermo BentoNo ratings yet
- Metodo NioshDocument9 pagesMetodo NioshFrancisco Javier Contreras TorresNo ratings yet
- Método Arrastre-EmpujeDocument18 pagesMétodo Arrastre-EmpujeJOHN MICHAEL MENDOZA REVILLANo ratings yet
- Modelo OCRADocument27 pagesModelo OCRAWilliamMoraNo ratings yet
- Informe GeneralDocument13 pagesInforme GeneralHellen JaraNo ratings yet
- Evaluación rápida de riesgos ergonómicosDocument8 pagesEvaluación rápida de riesgos ergonómicosMarco YarangaNo ratings yet
- Fundamentos del método de Niosh para la evaluación de levantamientos de cargaDocument10 pagesFundamentos del método de Niosh para la evaluación de levantamientos de cargaCarlos TorresNo ratings yet
- Apunte S2Document14 pagesApunte S2Kristheler SorianoNo ratings yet
- GINSHT - ErgonomíaDocument10 pagesGINSHT - Ergonomíajoel narvaesNo ratings yet
- Un Tema para DiscutirDocument45 pagesUn Tema para DiscutirFrancisco Felipe OrNo ratings yet
- Método GINSHTDocument15 pagesMétodo GINSHTmanuel guevaraNo ratings yet
- Método de Evaluación Ergonómica Niosh: ProfesoraDocument27 pagesMétodo de Evaluación Ergonómica Niosh: Profesoraacostajoserick2000hotmail.com AcostaNo ratings yet
- Ergonomía 3 - Resultados Método OWASDocument28 pagesErgonomía 3 - Resultados Método OWASoscarsanabria0928No ratings yet
- GINSHT - Guia de Manipulación Manual de Carga Del INSHTDocument14 pagesGINSHT - Guia de Manipulación Manual de Carga Del INSHTMARLON0% (1)
- MÉTODO DE INSHT-benaviesDocument24 pagesMÉTODO DE INSHT-benaviesDiego BenavidesNo ratings yet
- Snook y CirielloDocument9 pagesSnook y CirielloEDGAR ALONSO FELIX MENDIVILNo ratings yet
- Manejo Manual de Carga Ley 20Document22 pagesManejo Manual de Carga Ley 20Andres Lagos AlvarezNo ratings yet
- Metodo InshtDocument15 pagesMetodo InshtMarlonVe'raNo ratings yet
- Panificadora - Panorama de RiesgosDocument27 pagesPanificadora - Panorama de RiesgosFredy Santiago Morales AguilarNo ratings yet
- Taller de CostosDocument6 pagesTaller de CostosFredy Santiago Morales AguilarNo ratings yet
- Taller Procesos MarkovianosDocument25 pagesTaller Procesos MarkovianosFredy Santiago Morales AguilarNo ratings yet
- Ficha Filosofía de La Tecnología de Las HumanidadesDocument4 pagesFicha Filosofía de La Tecnología de Las HumanidadesFredy Santiago Morales AguilarNo ratings yet
- Taller AuditoriasDocument4 pagesTaller AuditoriasFredy Santiago Morales AguilarNo ratings yet
- Sostenibilidad EmpresarialDocument3 pagesSostenibilidad EmpresarialFredy Santiago Morales AguilarNo ratings yet
- Informe - Final PDFDocument14 pagesInforme - Final PDFFredy Santiago Morales AguilarNo ratings yet
- Informe Ley de SnellDocument11 pagesInforme Ley de SnellFredy Santiago Morales AguilarNo ratings yet
- Guitarra Auto Tono - Tercera EntregaDocument34 pagesGuitarra Auto Tono - Tercera EntregaFredy Santiago Morales AguilarNo ratings yet
- M9 S1 La Diversidad en Mexico - Prepa en Línea SEPDocument4 pagesM9 S1 La Diversidad en Mexico - Prepa en Línea SEPBetty JuarezNo ratings yet
- Metodologia para Presentacion de Casos ClinicosDocument5 pagesMetodologia para Presentacion de Casos ClinicosFamilia Lora Gravini0% (1)
- Descripción de La Cura de Todas Las Enfermedades El ZapperDocument21 pagesDescripción de La Cura de Todas Las Enfermedades El ZapperSandra BernardoNo ratings yet
- Onicomicosis por NattrassiaDocument4 pagesOnicomicosis por NattrassiaLupita AlavezNo ratings yet
- Guía Anticipatoria Adulto MedioDocument14 pagesGuía Anticipatoria Adulto MedioMario BetoNo ratings yet
- Med TropicalDocument2 pagesMed TropicalZullay Cecilia Salazar GonzalesNo ratings yet
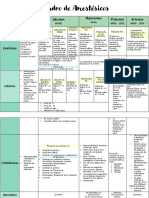
- Cuadro de AnestésicosDocument2 pagesCuadro de AnestésicosBrenda Diaz Martinez67% (3)
- ERC: DETECCIÓN, CLASIFICACIÓN Y TRATAMIENTODocument18 pagesERC: DETECCIÓN, CLASIFICACIÓN Y TRATAMIENTOerika vasquezNo ratings yet
- Administracion de Medicamentos Por Via OralDocument33 pagesAdministracion de Medicamentos Por Via OralYeick Villcas Salazar100% (1)
- Identificacion de Trastornos de AnsiedadDocument52 pagesIdentificacion de Trastornos de AnsiedadSubunidad Salud MentalNo ratings yet
- Informe de Cita: Bog Sur 08/04/2023Document2 pagesInforme de Cita: Bog Sur 08/04/2023DANIELA CASTRONo ratings yet
- Nutricion de Precision para Pollos de enDocument6 pagesNutricion de Precision para Pollos de enErick castellonNo ratings yet
- Introducción Al Saneamiento y Desarrollo SostenibleDocument13 pagesIntroducción Al Saneamiento y Desarrollo SostenibleJuan YepesNo ratings yet
- Folleto Sobre El Sistema General de Seguridad Social en Colombia.Document2 pagesFolleto Sobre El Sistema General de Seguridad Social en Colombia.ARNEFER CASTRO PRECIADONo ratings yet
- Producción y comercialización de quinua y amarantoDocument66 pagesProducción y comercialización de quinua y amarantoTito Arnaldo Hernández Terrones100% (1)
- Sobrado Chavez, SoledadDocument115 pagesSobrado Chavez, SoledadambarNo ratings yet
- SAST GA E5 Factores Psicosociales de RiesgoDocument10 pagesSAST GA E5 Factores Psicosociales de RiesgoAlex SuarezNo ratings yet
- Salud gratuita MéxicoDocument4 pagesSalud gratuita Méxicojacqueline100% (1)
- CONCLUSIÓNDocument7 pagesCONCLUSIÓNyomeroisauroNo ratings yet
- SG-SyST Grupo 416Document20 pagesSG-SyST Grupo 416juber023No ratings yet
- FICHA DE TRABAJO EPT-PERU-2022Document5 pagesFICHA DE TRABAJO EPT-PERU-2022juan carlos gamboa cruzNo ratings yet
- Protocolo triage urgencias Hospital Piloto JamundíDocument6 pagesProtocolo triage urgencias Hospital Piloto JamundíNatalie BriñasNo ratings yet
- Enfermería PediátricaDocument61 pagesEnfermería PediátricaDavid ChinchillaNo ratings yet
- Epc 5Document4 pagesEpc 5RAMOS RUBIO DIEGO ANDERSONNo ratings yet
- Determinantes de La Salud en La Población TrabajadoraDocument3 pagesDeterminantes de La Salud en La Población TrabajadoraPamela Fernanda Parrales RamosNo ratings yet
- Informe de Salud Del NiñoDocument6 pagesInforme de Salud Del Niñojeyson perez almeydaNo ratings yet
- Cotizacion Karen ValverdeDocument3 pagesCotizacion Karen ValverdeKaren ValverdeNo ratings yet
- Situación COVID-19 Municipio Cobán Mayo-Diciembre 2020Document11 pagesSituación COVID-19 Municipio Cobán Mayo-Diciembre 2020Wendy CabnalNo ratings yet
- Dimenciones Del Ser HumanoDocument5 pagesDimenciones Del Ser HumanoLu Jose CondeNo ratings yet
- Opportu EsDocument12 pagesOpportu EsCésar MezaNo ratings yet