You might also like
- VLSI Interview QuestionsDocument7 pagesVLSI Interview QuestionsVlsi GuruNo ratings yet
- Interview VlsiDocument47 pagesInterview VlsiKulwant Nagi100% (1)
- Questions On Logic SynthesisDocument11 pagesQuestions On Logic SynthesisrAM89% (9)
- Low Power Upf NotesDocument5 pagesLow Power Upf Notessaugat guhaNo ratings yet
- Clock Gating MethodologyDocument71 pagesClock Gating MethodologyGirish BabuNo ratings yet
- From RTL To GDS Using Synopsys Flow Within Less Then 10 WeeksDocument15 pagesFrom RTL To GDS Using Synopsys Flow Within Less Then 10 WeeksLohitNo ratings yet
- Upf PresentationDocument30 pagesUpf PresentationAnupam Gajendra Narayan ChoudharyNo ratings yet
- Synthesis Guide Very GoodDocument332 pagesSynthesis Guide Very GoodAtif Ammed SyedNo ratings yet
- Clock GatingDocument12 pagesClock Gatingsandyk_24No ratings yet
- Vlsi FaqsDocument29 pagesVlsi Faqsanon-417212100% (4)
- Verilog FAQ TIDBITSDocument31 pagesVerilog FAQ TIDBITSrAM100% (4)
- Static Timing Analysis in VLSI CircuitsDocument16 pagesStatic Timing Analysis in VLSI CircuitseeshgargNo ratings yet
- SystemVerilog Assertions TutorialDocument9 pagesSystemVerilog Assertions Tutorialgopaljanani100% (1)
- Basics of UPFDocument7 pagesBasics of UPFPrabhudatta MohantyNo ratings yet
- Lock Up Latch in VLSIDocument8 pagesLock Up Latch in VLSIsandy_711100% (1)
- VLSI Interview QuestionsDocument70 pagesVLSI Interview QuestionsRohith Raj60% (5)
- ASIC Interview Question & Answer - ASIC FlowDocument4 pagesASIC Interview Question & Answer - ASIC Flowprodip7No ratings yet
- Static Timing Analysis 9100Document32 pagesStatic Timing Analysis 9100Balaji VenkataramanNo ratings yet
- Clock Domain Crossing BasicsDocument9 pagesClock Domain Crossing BasicsRapolu SushmaNo ratings yet
- UPF Example: UPF For The Above Power Intent: ######## Create Power Domains ###########Document4 pagesUPF Example: UPF For The Above Power Intent: ######## Create Power Domains ###########Mayur Agarwal50% (2)
- ASIC Interview Question & Answer: Prime Time QuestionsDocument5 pagesASIC Interview Question & Answer: Prime Time Questionsprodip7No ratings yet
- ASIC Interview Question & Answer - Verilog Interview QuestionsDocument18 pagesASIC Interview Question & Answer - Verilog Interview Questionsvasav1No ratings yet
- Design & Verification of Low Power SocsDocument54 pagesDesign & Verification of Low Power SocsAnkit GoelNo ratings yet
- IntelDocument5 pagesIntelrAM67% (3)
- Static Timing AnalysisDocument49 pagesStatic Timing AnalysisedussinNo ratings yet
- Clock BuffersDocument29 pagesClock Buffersnaveen silveri100% (2)
- Special CelllsDocument14 pagesSpecial Celllspdnoob100% (4)
- SystemVerilog Assertions For DummiesDocument26 pagesSystemVerilog Assertions For DummiesmnnarasimhaNo ratings yet
- Understanding Clock Domain Crossing IssuesDocument20 pagesUnderstanding Clock Domain Crossing IssuesPraveen Guttula100% (1)
- 7 CLK Tree SynthesisDocument64 pages7 CLK Tree Synthesisdharma_panga8217100% (1)
- VLSI Interview Questions With Answers - Ebook - VLSI Design Interview Questions With Answers - Ebook PDFDocument4 pagesVLSI Interview Questions With Answers - Ebook - VLSI Design Interview Questions With Answers - Ebook PDFnaveen silveri50% (4)
- Asic Interview QuestionsDocument13 pagesAsic Interview QuestionsMohan BootheswarNo ratings yet
- FPGA Interview QuestionsDocument12 pagesFPGA Interview QuestionsVirbhadra RathodNo ratings yet
- Clock Tree SynthesisDocument27 pagesClock Tree Synthesispdnoob100% (3)
- SANDISKDocument3 pagesSANDISKrAM100% (3)
- (Word To PDF Converter - Unregistered) : 1) Top of FormDocument83 pages(Word To PDF Converter - Unregistered) : 1) Top of FormsarathynalNo ratings yet
- Static Timing AnalysisDocument71 pagesStatic Timing Analysisapi-3762689100% (13)
- UVM Interview QuestionsDocument8 pagesUVM Interview QuestionsPriyank Patel100% (2)
- VLSI Design Overview and Questionnaires - FPGA Interview Questions and Answers PDFDocument7 pagesVLSI Design Overview and Questionnaires - FPGA Interview Questions and Answers PDFVenkatGollaNo ratings yet
- Synopsys PrimeTime - Introduction To Static Timing Analysis WorkshopDocument21 pagesSynopsys PrimeTime - Introduction To Static Timing Analysis WorkshopApoorva Bhatt100% (2)
- Verilog FaqDocument101 pagesVerilog Faqbalashyamu100% (1)
- VLSI Test Principles and Architectures: Design for TestabilityFrom EverandVLSI Test Principles and Architectures: Design for TestabilityRating: 4.5 out of 5 stars4.5/5 (4)
- Digital Circuit Testing: A Guide to DFT and Other TechniquesFrom EverandDigital Circuit Testing: A Guide to DFT and Other TechniquesNo ratings yet
- System-on-Chip Test Architectures: Nanometer Design for TestabilityFrom EverandSystem-on-Chip Test Architectures: Nanometer Design for TestabilityNo ratings yet
- Formal Verification: An Essential Toolkit for Modern VLSI DesignFrom EverandFormal Verification: An Essential Toolkit for Modern VLSI DesignRating: 4 out of 5 stars4/5 (4)
- MOS Integrated Circuit DesignFrom EverandMOS Integrated Circuit DesignE. WolfendaleNo ratings yet
- ASIC and FPGA Verification: A Guide to Component ModelingFrom EverandASIC and FPGA Verification: A Guide to Component ModelingRating: 5 out of 5 stars5/5 (1)
- Electronic Design Automation: Synthesis, Verification, and TestFrom EverandElectronic Design Automation: Synthesis, Verification, and TestNo ratings yet
- Digital Integrated Circuit Design Using Verilog and SystemverilogFrom EverandDigital Integrated Circuit Design Using Verilog and SystemverilogRating: 3 out of 5 stars3/5 (4)
- Design Recipes for FPGAs: Using Verilog and VHDLFrom EverandDesign Recipes for FPGAs: Using Verilog and VHDLRating: 2 out of 5 stars2/5 (1)
- Application Specific Integrated Circuit (ASIC) TechnologyFrom EverandApplication Specific Integrated Circuit (ASIC) TechnologyNorman EinspruchNo ratings yet
- Digital Design Interview Questions 1Document14 pagesDigital Design Interview Questions 1Mohit TopiwalaNo ratings yet
- Clock Domain CrossingDocument5 pagesClock Domain CrossingRAGUL RAJ SNo ratings yet
- STA FinalDocument66 pagesSTA FinalgauravkshriNo ratings yet
- 1 Basics of Income Tax IpccDocument4 pages1 Basics of Income Tax IpccVishnu VardhanNo ratings yet
- The PRINCE2 Training ManualDocument2 pagesThe PRINCE2 Training Manualmanohar487No ratings yet
- SBI PO Recruitment Notification 2017 - Released!Document4 pagesSBI PO Recruitment Notification 2017 - Released!nidhi tripathi100% (1)
- How To Build A Portable USB ChargerDocument32 pagesHow To Build A Portable USB Chargermanohar487No ratings yet
- Arihant CAT Practice Set 1 With Solutions-MinDocument23 pagesArihant CAT Practice Set 1 With Solutions-MinbingoNo ratings yet
- Telangana Current Affairs 2017 by AffairsCloudDocument11 pagesTelangana Current Affairs 2017 by AffairsCloudmanohar487No ratings yet
- Breakup VacanciesDocument3 pagesBreakup Vacanciesmanohar487No ratings yet
- AAI JE 2012 AnalysisDocument4 pagesAAI JE 2012 AnalysisPriyanka Chauhan100% (1)
- G Pullaiah College of Engineerng and Technology: (Faculty Recruitment Notification)Document1 pageG Pullaiah College of Engineerng and Technology: (Faculty Recruitment Notification)manohar487No ratings yet
- Indcative Advt Drjto Gate17 - 1Document1 pageIndcative Advt Drjto Gate17 - 1manohar487No ratings yet
- Bel 2015 CutofffDocument1 pageBel 2015 Cutofffmanohar487No ratings yet
- Page 1 of 20: TH TH THDocument20 pagesPage 1 of 20: TH TH THtripathymanjulNo ratings yet
- Civil Engineering Final Key: Q.No. Answer Q.No. Answer Q.No. Answer Q.No. AnswerDocument4 pagesCivil Engineering Final Key: Q.No. Answer Q.No. Answer Q.No. Answer Q.No. Answermanohar487No ratings yet
- Question No. 1: View SolutionDocument15 pagesQuestion No. 1: View Solutionmanohar487No ratings yet
- Genco Key OfficialDocument5 pagesGenco Key Officialmanohar487No ratings yet
- Tsgenco SyllabusDocument3 pagesTsgenco Syllabusmanohar487No ratings yet
- Gatecounsellor I: Words For Practice-I AnswersDocument3 pagesGatecounsellor I: Words For Practice-I Answersmanohar487No ratings yet
- Solnchap 08Document61 pagesSolnchap 08api-3701823No ratings yet
- Sequential Machine TheoryDocument46 pagesSequential Machine Theorymanohar487No ratings yet
- Mcs Exam enDocument9 pagesMcs Exam enVijay KakaniNo ratings yet
- Key Aai260415Document8 pagesKey Aai260415manohar487No ratings yet
- Breakup VacanciesDocument3 pagesBreakup Vacanciesmanohar487No ratings yet
- D0004 PAPERIMasterDocument24 pagesD0004 PAPERIMasterMahalakshmi SundarapandianNo ratings yet
- Me ApplicationDocument5 pagesMe ApplicationYsharath ChandramouliNo ratings yet
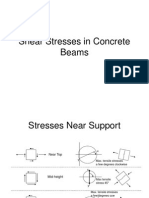
- Shear Stresses in Concrete BeamsDocument9 pagesShear Stresses in Concrete BeamsPalak AriwalaNo ratings yet
- Test - 1 Key SheetDocument1 pageTest - 1 Key Sheetmanohar487No ratings yet
- Final MT 2015 Advt.Document8 pagesFinal MT 2015 Advt.manohar487No ratings yet
- Omr SheetDocument1 pageOmr Sheetsundarjothi100% (1)
- Swconfig50 Getting StartedDocument360 pagesSwconfig50 Getting StartedJose Gerardo Pineda GalindoNo ratings yet
- Server Controls and Events: IT 4203 Advanced Web DevelopmentDocument25 pagesServer Controls and Events: IT 4203 Advanced Web DevelopmentBindu Devender MahajanNo ratings yet
- The Anatomy of DMX-512Document5 pagesThe Anatomy of DMX-512api-3755810No ratings yet
- Telecom Power NRMS Software Install and PresentationDocument57 pagesTelecom Power NRMS Software Install and PresentationSahand ArasNo ratings yet
- My Cloud EX2 UltraDocument129 pagesMy Cloud EX2 UltraganmalNo ratings yet
- ES2402 16P 2C User Manual PDFDocument97 pagesES2402 16P 2C User Manual PDFPaul Ramos CarcaustoNo ratings yet
- Ops MGR MPConfig MGRDocument33 pagesOps MGR MPConfig MGRvvygfyvvNo ratings yet
- License Wizard: Installation Notes For Version 3.1Document26 pagesLicense Wizard: Installation Notes For Version 3.1angusyoung1No ratings yet
- 3PAR T Class Maintenance Manual PDFDocument356 pages3PAR T Class Maintenance Manual PDFMq Sfs0% (1)
- ADAM 4541 42 Manual PDFDocument4 pagesADAM 4541 42 Manual PDFDaniel RolonNo ratings yet
- PID Based Temperature Controller Implementation On FPGADocument11 pagesPID Based Temperature Controller Implementation On FPGAamitkumar_87No ratings yet
- ActivateDocument7 pagesActivateekocu2121No ratings yet
- List of All Run Commands For WindowsDocument10 pagesList of All Run Commands For Windowsdixityog100% (1)
- Loki Design DocumentDocument8 pagesLoki Design Documenthsaavedra1No ratings yet
- Cloud Computing For Green Construction ManagementDocument4 pagesCloud Computing For Green Construction ManagementOkino CharlesNo ratings yet
- CV Stefan NikitinDocument1 pageCV Stefan NikitinStefan NikitinNo ratings yet
- CARESTREAM DIRECTVIEW Software V5.7E User Release NotesDocument10 pagesCARESTREAM DIRECTVIEW Software V5.7E User Release NotesKhuang Tong0% (1)
- RC Catalog 2017 v2Document71 pagesRC Catalog 2017 v2AlfredNo ratings yet
- Difference Between Primary Storage and Secondary StorageDocument1 pageDifference Between Primary Storage and Secondary Storagesridhar100% (1)
- PIC16F8X: 8-Bit CMOS Flash/EEPROM MicrocontrollersDocument122 pagesPIC16F8X: 8-Bit CMOS Flash/EEPROM MicrocontrollerssebastienNo ratings yet
- Release Notes Coolbiz5.1Document49 pagesRelease Notes Coolbiz5.1nekaNo ratings yet
- Bca Project On Courier Management SystemDocument245 pagesBca Project On Courier Management Systemnhnavneet85% (52)
- Sample SRS Online Examination SystemDocument14 pagesSample SRS Online Examination Systemjasmine_patel_10No ratings yet
- Q2n WebCamAudioDriver Installation Guide WindowsDocument6 pagesQ2n WebCamAudioDriver Installation Guide WindowsAliLeeNo ratings yet
- Research Paper CloudDocument7 pagesResearch Paper Cloudpuliv4uNo ratings yet
- Cognitive TPG A760 Two-Color Thermal/Impact Hybrid Printer BrochureDocument2 pagesCognitive TPG A760 Two-Color Thermal/Impact Hybrid Printer BrochureJohnny BarcodeNo ratings yet
- P063Document3 pagesP063ZoYa MunirNo ratings yet
- T Advantage and Disadvantages of WirelesDocument13 pagesT Advantage and Disadvantages of WirelesTalhaAftabNo ratings yet
- SaaS ArchitectureDocument20 pagesSaaS ArchitectureFirdausNo ratings yet