Table Top Robot
TTA Series
www. i nt el l i gent act uat or. com
1
Significantly Higher Payload and Maximum Speed
Stores Much More Programs and Positions
Three Times As Many I/O Points As Conventional Models
1.
2.
3.
Improved Tabletop Robot
for Cell Production Applications,
Featuring Significantly Higher Payload,
Maximum Speed and Rigidity!
Conventional model TTA
Maximum payload
(kg)
Work part side (X-axis) 10 20
Tool side (Z-axis) 2 5
Maximum speed
(mm/sec)
X-axis 300 800
Y-axis 300 800
Z-axis 300 400
Conventional model TTA
Number of programs 64 255
Number of program steps 6,000 9,999
Number of multi-tasking programs 16 16
Number of display languages 2 (Japanese/English) 2 (Japanese/English)
Number of positions 3,000 30,000 (*1)
*1: 10,000 points can be backed up in the system memory.
Inputs/outputs
16 points/16 points Up to 48 points/48 points (*)
The larger memory lets you store much more programs and positions.
The additional data recovery function makes sure the original data can be restored should writing to
a FLASH drive fails due to a power failure.
When the standard I/O slot isn't enough, up to two additional expansion I/O slots can be installed.
Supporting field
networks
Up to 2.5 times
Up to 2.6 times
4 times more programs
10 times more positions
(*)When the expansion I/O slot (coming soon) is added
(Coming soon)
3
times more
2
More Variations
Greater Bending Rigidity is Achieved by Integrating the
Structure of the Y-axis Base with the Mounting Bracket.
4.
5.
Four operating ranges are available to choose from.
The 3-axis specification is available in two types of Z-axis strokes:
100mm and 150mm.
You can select a model ideal for the size of your work part.
Additional options let you change the Y-axis height and position.
(Refer to p. 3 for details.)
Labyrinth structure
Labyrinth Structure to Suppress Intrusion of Foreign Matter into X-axis
6.
The X-axis opening is structured as a labyrinth in order
to make it difficult for foreign matter dropping onto
the actuator (such as screws, molten metal, dust, etc.)
to enter the X-axis. This expands the types of work
environment supported.
X-axis slider
X-axis
Actuator
Top base
X-axis ball screw cover
Y-axis base & mounting bracket in one
Integral Structure
Y-axis base
Bending rigidity
at least 1.5 times
higher than the
conventional model
500500
200200 300300
400400
* You can also custom-order 4-axis robots.
3
Standard Standard + 50mm up Standard + 100mm up
Y-axis height is selectable H1 H2
Standard Standard + 90mm forward Standard + 180mm forward
Y-axis horizontal position is selectable F1 F2
* To change both the Y-axis height and Y-axis horizontal position, specify the type codes in alphabetical order together with other option codes.
(Example: AP-F1-FT-H2-OS)
TTA Series Lineup
Additional options let you change the support height and horizontal position.
TTA
Z-axis 100mm
Z-axis 150mm
Z-axis 100mm
Z-axis 150mm
Z-axis 100mm
Z-axis 150mm
Z-axis 100mm
Z-axis 150mm
20-20 : 200200mm (Cantilever type)
30-30 : 300300mm (Gate type)
40-40 : 400400mm (Gate type)
50-50 : 500500mm (Gate type)
20-20 : 200200mm (Cantilever type) ....................................
30-30 : 300300mm (Gate type) .............................................
40-40 : 400400mm (Gate type) .............................................
50-50 : 500500mm (Gate type) .............................................
X-axis Y-axis
X-axis Y-axis
2-axis type
3-axis type
P12
P8
P10
P9
P11
P14
P13
P15
* You can also custom-order 4-axis robots.
50mm
90mm 180mm
(Standard)
(Standard)
H1 (Standard + 50mm)
F1 (90mm forward
of standard position)
H2 (Standard + 100mm)
F2 (180mm forward
of standard position)
Standard
height
Standard
position
Y-axis height is
selectable
Y-axis horizontal
position is
selectable
100mm
4
System Configuration
Optional Detachable Operation Console
The operation console can be separated
from the product for handy operation.
(Cable length: 900mm)
Back Panel Wiring Layout
Front Panel Wiring Layout
Teaching Pendant
(Option)
PC Software
(Option)
I/O Flat Cable (Accessory) Variety of Field Networks (Options)
Model: TB-01
Model: IA-101-X-MW
IA-101-TTA-USB
IA-101-X-USBMW
Model: CB-PAC-PIO020
Emergency
Stop Switch
Electromagnetic
Relay
Enable Switch
(Coming soon)
Protective
Grounding
* Emergency stop switch, enable switch, electromagnetic relay, and other external devices may be connected
and wired if necessary. If no devices are connected or wired, the robot will still operate properly. Connectors
with jumper wires are supplied.
Expansion
I/O
Standard I/O
Service Power
Supply connector
Select from those below
for the power supply cable
Only with plug on main unit side
Power supply cable for 100 VAC (2m)
Power supply cable for 200 VAC (2m)
PC Connection Cable
(Supplied with the PC Software)
Model: CB-ST-E1MW050 (5m)
CB-SEL-USB030 (3m)
PLC
5m
5m/3m
2m
100 to 230 VAC
Type
2
Standard
I/O Slot
10
Expansion
I/O Slot 1
11
Expansion
I/O Slot 2
12
I/O Cable
length
13
X-axis
Contents
4 5
Y-axis
Contents
6 7
Z-axis
Contents
8 9
Series
TTA
1
Encoder
type
I
3
5
Power Supply Cable
Specification
14
Option
15
1 Series
Name of the series
2 Type
Type and number of axes
A2: Gate Type, 2 axes
A3: Gate Type, 3 axes
* The 2020 type is a cantilever type. (The gate type can be selected by
specifying the option code [AP].)
3 Encoder type
Type of encoder installed in the actuator
I: Incremental
The slider position data is lost once the power is turned off, which means that
home return will be required the next time the power is turned on.
4 X-axis stroke
Stroke of the X-axis
* The X-axis stroke and the Y-axis stroke must be the same.
5 X-axis options
The following options are selectable:
HS: Home confirmation sensor
NM: Non-motor side specification
6 Y-axis stroke
Stroke of the Y-axis
* The X-axis stroke and the Y-axis stroke must be the same.
7 Y-axis options
The following options are selectable:
HS: Home confirmation sensor
NM: Non-motor side specification
8 Z-axis stroke
Stroke of the Z-axis
* Two types of 100mm and 150mm are available to choose from.
9 Z-axis options
The following options are selectable:
B: Brake (standard accessory)
HS: Home confirmation sensor
NM: Non-motor side specification
10 Standard I/O slot
Type of PIO slot installed as standard accessory
NP: Standard PIO (NPN specification)
PN: Standard PIO (PNP specification)
11 Expansion I/O slot 1 / 12 Expansion I/O slot 2
The following interface boards can be added as options:
E: Not used
NP: Expansion PIO board (NPN specification)
PN: Expansion PIO board (PNP specification)
DV: DeviceNet connection board
CC: CC-Link connection board
PR: PROFIBUS-DP connection board
EP: EtherNet/IP connection board
13 I/O Cable length
Select the length of the flat cable for the PIO board selected for the standard/
expansion slot. (Unit: m)
14 Power cable length
Select the type of power cable to be installed.
PU: Mating plug (No cable)
1: Power supply cable for 100 VAC (2m)
2: Power supply cable for 200 VAC (2m)
15 Option
AP: Although the standard specification of the 2020 type is Cantilever,
it can be changed to "Gate" type by choosing this option.
I Incremental
X-axis stroke
20 200mm
30 300mm
40 400mm
50 500mm
Y-axis stroke
20 200mm
30 300mm
40 400mm
50 500mm
Z-axis stroke
10 100mm
15 150mm
X-axis option
HS Home confirmation sensor
NM Non-motor side specification
Y-axis option
HS Home confirmation sensor
NM Non-motor side specification
Z-axis option
B Brake (Standard)
HS Home confirmation sensor
NM Non-motor side specification
A2 Gate, 2 axes
A3 Gate, 3 axes
NP NPN specification
PN PNP specification
E Not used
NP
Expansion PIO board
(NPN specification) (*)
PN
Expansion PIO board
(PNP specification) (*)
DV DeviceNet connection board
CC CC-Link connection board
PR PROFIBUS-DP connection board
EP EtherNet/IP connection board (*)
(*) Coming soon
PU Mating plug (No cable)
1
Power supply cable
for 100 VAC (2m)
2
Power supply cable
for 200 VAC (2m)
H1
Y-axis mounting position
height 50mm up
P3
H2
Y-axis mounting position
height 100mm up
F1 Y-axis mounting position 90mm forward
F2 Y-axis mounting position 180mm forward
FT4 Foot bracket equipped type (4 pcs)
P22
FT6 Foot bracket equipped type (6 pcs)
AP Support added for 2020 type
OS Detachable operation console P4
0 None
2 2m
3 3m
5 5m
Explanation of Model Name
* The EtherNet/IP connection board
can be connected only in expansion
slot one. If another board is also used,
it is installed in expansion slot 2.
6
Payload Acceleration/deceleration
20kg 0.2G or less
18kg 0.2G or less
15kg 0.3G or less
12kg 0.3G or less
10kg 0.4G or less
8kg 0.4G or less
Payload Acceleration/deceleration
10kg 0.4G or less
8kg 0.4G or less
Payload Acceleration/deceleration
5kg 0.2G or less
4kg 0.2G or less
3kg 0.2G or less
Correlation Diagram of Payload and Speed
All models in the TTA series use pulse motors. Due to the characteristics of the pulse motor, the payload decreases as the speed increases.
Use the tables below to check if the desired speed and payload are met.
X-axis
Z-axis
Y-axis Z-axis
Payload and acceleration/deceleration
* The push force may vary by 10% of the maximum push force.
Payload and acceleration/deceleration Payload and acceleration/deceleration
In the case of push-motion operation, the push force can be changed freely by changing the electric current limit of the controller.
Correlation Graph of Push Force and Electric Current Limit
Notes
Speed (mm/sec) Speed (mm/sec) Speed (mm/sec)
P
a
y
l
o
a
d
(
k
g
)
P
a
y
l
o
a
d
(
k
g
)
P
a
y
l
o
a
d
(
k
g
)
Electric Current Limit [%]
P
u
s
h
F
o
r
c
e
(
N
)
7
Notes
Notes on Catalog Specifications
Speed
"Speed" refers to the set speed at which the actuator is moved.
The slider accelerates from a stationary state. Once the set speed is reached, the slider will
move at that speed until immediately before the target position (specified position), where the
slider will decelerate to a stop.
"Acceleration" refers to the rate of change of speed from a stationary state until the set speed is
reached. "Deceleration" refers to the rate of change of speed from the set speed until the slider stops.
Acceleration and deceleration are set in "G" (0.3G = 2940mm/sec
2
).
"Positioning repeatability" refers to the positioning accuracy when the actuator is repeatedly moved to
a pre-stored position. It is different from "absolute positioning accuracy."
The home is located on the motor side on the actuator for standard specification, or on the front side of
the actuator in the non-motor side specification.
During home return the slider moves until it contacts the mechanical end, and then it reversed its
direction. Be careful to prevent contact with surrounding parts.
The load moment is calculated by assuming a travel life of 5,000km. Note that if the specified moment
value is exceeded, the service life of the guide will be reduced. The direction of each moment and
applicable reference point are shown below:
X-axis
X-axis X-axis
Y-axis
Y-axis
Y-axis
The tabletop robot can be operated at a duty of 100%.
Duty (%) =
Operating time
x 100
Operating time + Stopped time
Acceleration/Deceleration
Duty
Positioning repeatability
Home
Dynamic allowable
moment
(Ma, Mb, Mc)
Z-axis
Z-axis
Z-axis
Y-axis: Ma direction
Z-axis: Mc direction
Z-axis: Mb direction
Z-axis: Ma direction
Y-axis: Mc direction
X-axis: Ma direction
Y-axis
Reference position for
Ma moment offset
X-axis
Reference position for
Ma moment offset
X-axis:
Mc direction
Y-axis:
Mb direction
Z-axis
Reference position for
Ma moment offset
X-axis:
Mb direction
Applicable Controller Specifications
Expansion I/O Slot Common specifications
Drive system Ball screw (12mm, rolled C10) Speed increased at 1.5:1 using a timing belt
Positioning repeatability 0.02mm (Note 2)
Lost motion 0.1mm or less
Guide Ball-circulation type linear guide
Dynamic allowable moment
(Note 3)
X-axis: Ma: 15.9 N
.
m Mb: 15.9 N
.
m Mc: 32.0 N
.
m
Y-axis: Ma: 12.6 N
.
m Mb: 12.6 N
.
m Mc: 37.4 N
.
m
Ambient temperature/humidity 0 to 40C, 85% RH max. (non-condensing)
Actuator weight 24kg
Model/Specifications
* In the above model number, 1 and 2 indicate the XY-axis options, 3 indicates the standard slot, 4 and 5 indicate the expansion slots, 6 indicates the I/O cable length, 7 indicates the power supply cable specification, and 8 indicates the selected option(s).
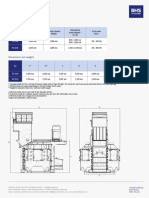
Model number Axis configuration Encoder type Motor type Lead (mm) Stroke (mm) Speed (mm/sec)
Payload (kg)
(Note 1)
TTA-A2-I-20 1 -20 2 - 3 - 4 - 5 - 6 - 7 - 8
X-axis
Incremental Pulse motor
16 200 1~800 20
Y-axis 16 200 1~800 10
Name Model Reference page
Not used E
Expansion PIO board (NPN specification)* NP
Expansion PIO board (PNP specification)* PN
DeviceNet connection board DV
CC-Link connection board CC
PROFIBUS-DP connection board PR
EtherNet/IP connection board* EP
Applicable
controller
Maximum
number of
controlled axes
Compatible
encoder type
Program
operation
Power-supply
voltage
Page
Built-in 2 axes Incremental Program
AC100V
AC200V
P16
* Refer to P. 5 for the details of model specification items.
* During home return, the slider moves to
the ME, so be careful to prevent contact
with surrounding parts.
SE: Stroke end
ME: Mechanical end
Dimensions
You can download CAD
drawings from our website.
2D
CAD
2D
CAD
(Note 1) The maximum speed cannot be achieved based on the maximum payload setting. The
payload decreases when the speed is increased. Also note that the maximum
acceleration/deceleration varies depending on the payload. (Refer to P. 6.)
(Note 2) It is limited to when the actuator temperature is constant. It does not guarantee the absolute
accuracy.
(Note 3) The dynamic allowable moment is a value of each axis assuming a traveling life of 5,000km.
(Refer to P. 7 for the dynamic allowable moment.)
TTA-A2-20-20 8
TTA-A2-20-20
Tabletop Robot/Cantilever type 2-axis specification
XY-axes: 200mm
HS: Home confirmation sensor
NM: Non-motor side specification
Refer to the expansion
I/O slot table below.
* If the expansion I/O slot is not used, enter E.
20 : 200mm 20 : 200mm 0:None
2:2m
3:3m
5:5m
PU: Mating plug (No cable)
1: Power supply cable for 100 VAC (2m)
2: Power supply cable for 200 VAC (2m)
NP: NPN specification
PN: PNP specification
Refer to P. 5. A2: 2 axes
(Cantilever)
I: Incremental
specification
TTA
Series
I
Encoder
type
20
X-axis
stroke
20
Y-axis
stroke
A2
Type X-axis
option
Y-axis
option
Option Standard
I/O Slot
Expansion
I/O Slot 1
Expansion
I/O Slot 2
I/O Cable
length
Power Supply Cable
Specification
* Coming soon
Home
(R
e
a
m
e
r
P
it
c
h
T
o
le
r
a
n
c
e
0
.0
2
)
(R
e
a
m
e
r
P
it
c
h
T
o
le
r
a
n
c
e
0
.0
2
)
2 - 5 H7, Depth 5
2 - 5 H7, Depth 5
6-M5, Depth 7
6-M5, Depth 7
4-M4, Depth 7
T-Groove x 2
6-M4, Depth 7
Detail Diagram S (Detail of X-axis Slider)
Detail Diagram U (Detail of Y-axis Slider)
T-Groove (Same Profile on the Opposite Side)
Dial for Y-Slider Position Tuning
Home
X View (T-Groove on the Side of the Main Unit)
Profile of T-Groove on the Frame
X View T-Groove x 2
Caution
Model
Specifcation
Items
9 TTA-A2-30-30
Name Model Reference page
Not used E
Expansion PIO board (NPN specification)* NP
Expansion PIO board (PNP specification)* PN
DeviceNet connection board DV
CC-Link connection board CC
PROFIBUS-DP connection board PR
EtherNet/IP connection board* EP
Applicable Controller Specifications
Expansion I/O Slot Common specifications
Drive system Ball screw (12mm, rolled C10) Speed increased at 1.5:1 using a timing belt
Positioning repeatability 0.02mm (Note 2)
Lost motion 0.1mm or less
Guide Ball-circulation type linear guide
Dynamic allowable moment
(Note 3)
X-axis: Ma: 15.9 N
.
m Mb: 15.9 N
.
m Mc: 32.0 N
.
m
Y-axis: Ma: 12.6 N
.
m Mb: 12.6 N
.
m Mc: 37.4 N
.
m
Ambient temperature/humidity 0 to 40C, 85% RH max.(non-condensing)
Actuator weight 31kg
Model/Specifications
* In the above model number, 1 and 2 indicate the XY-axis options, 3 indicates the standard slot, 4 and 5 indicate the expansion slots, 6 indicates the I/O cable length, 7 indicates the power supply cable specification, and 8 indicates the selected option(s).
Model number Axis configuration Encoder type Motor type Lead (mm) Stroke (mm) Speed (mm/sec)
Payload (kg)
(Note 1)
TTA-A2-I-30 1 -30 2 - 3 - 4 - 5 - 6 - 7 - 8
X-axis
Incremental Pulse motor
16 300 1~800 20
Y-axis 16 300 1~800 10
Applicable
controller
Maximum
number of
controlled axes
Compatible
encoder type
Program
operation
Power-supply
voltage
Page
Built-in 2 axes Incremental Program
AC100V
AC200V
P16
* Refer to P. 5 for the details of model specification items.
Dimensions
You can download CAD drawings
from our website.
2D
CAD
2D
CAD
(Note 1) The maximum speed cannot be achieved based on the maximum payload setting. The
payload decreases when the speed is increased. Also note that the maximum
acceleration/deceleration varies depending on the payload. (Refer to P. 6.)
(Note 2) It is limited to when the actuator temperature is constant. It does not guarantee the absolute
accuracy.
(Note 3) The dynamic allowable moment is a value of each axis assuming a traveling life of 5,000km.
(Refer to P. 7 for the dynamic allowable moment.)
TTA-A2-30-30
Tabletop Robot/Gate type 2-axis specification
XY-axes: 300mm
Refer to the expansion I/O slot table below.
* If the expansion I/O slot is not used,
enter E.
30 : 300mm 30 : 300mm
HS: Home confirmation sensor
NM: Non-motor side specification
0:None
2:2m
3:3m
5:5m
PU: Mating plug (No cable)
1: Power supply cable for 100 VAC (2m)
2: Power supply cable for 200 VAC (2m)
NP: NPN specification
PN: PNP specification
Refer to
P.5.
A2: 2 axes
(Gate)
I: Incremental
specification
TTA
Series
I
Encoder
type
30
X-axis stroke
30
Y-axis
stroke
A2
Type X-axis
option
Y-axis
option
Option Standard
Slot
Expansion
Slot 1
Expansion
I/O Slot 2
I/O Cable
length
Power Supply Cable
Specification
* Coming soon
Home
Home
(R
e
a
m
e
r
P
it
c
h
T
o
le
r
a
n
c
e
0
.0
2
)
(R
e
a
m
e
r
P
it
c
h
T
o
le
r
a
n
c
e
0
.0
2
)
2-5 H7, Depth 5
2-5 H7, Depth 5
6-M5, Depth 7
6-M5, Depth 7
4-M4, Depth 7
T-Groove x 2
6-M4, Depth 7
Detail Diagram S (Detail of X-axis Slider)
Detail Diagram U (Detail of Y-axis Slider)
T-Groove (Same Profile on the Opposite Side)
Dial for Y-Slider Position Tuning
T-Groove x 2
(Same Profile on the Opposite Side on the Frame)
X View (T-Groove on the Side of the Main Unit)
Profile of T-Groove on the Frame
X View T-Groove x 2
Caution
* During home return, the slider moves to
the ME, so be careful to prevent contact
with surrounding parts.
SE: Stroke end
ME: Mechanical end
Model
Specifcation
Items
TTA-A2-40-40 10
Applicable Controller Specifications
Expansion I/O Slot Common specifications
Drive system Ball screw (12mm, rolled C10) Speed increased at 1.5:1 using a timing belt
Positioning repeatability 0.02mm (Note 2)
Lost motion 0.1mm or less
Guide Ball-circulation type linear guide
Dynamic allowable moment
(Note 3)
X-axis: Ma: 15.9 N
.
m Mb: 15.9 N
.
m Mc: 32.0 N
.
m
Y-axis: Ma: 12.6 N
.
m Mb: 12.6 N
.
m Mc: 37.4 N
.
m
Ambient temperature/humidity 0 to 40C, 85% RH max.(non-condensing)
Actuator weight 37kg
Model/Specifications
* In the above model number, 1 and 2 indicate the XY-axis options, 3 indicates the standard slot, 4 and 5 indicate the expansion slots, 6 indicates the I/O cable length, 7 indicates the power supply cable specification, and 8 indicates the selected option(s).
Model number Axis configuration Encoder type Motor type Lead (mm) Stroke (mm) Speed (mm/sec)
Payload (kg)
(Note 1)
TTA-A2-I-40 1 -40 2 - 3 - 4 - 5 - 6 - 7 - 8
X-axis
Incremental Pulse motor
16 400 1~800 20
Y-axis 16 400 1~800 10
Applicable
controller
Maximum
number of
controlled axes
Compatible
encoder type
Program
operation
Power-supply
voltage
Page
Built-in 2 axes Incremental Program
AC100V
AC200V
P16
* Refer to P. 5 for the details of model specification items.
(Note 1) The maximum speed cannot be achieved based on the maximum payload setting. The
payload decreases when the speed is increased. Also note that the maximum
acceleration/deceleration varies depending on the payload. (Refer to P. 6.)
(Note 2) It is limited to when the actuator temperature is constant. It does not guarantee the absolute
accuracy.
(Note 3) The dynamic allowable moment is a value of each axis assuming a traveling life of 5,000km.
(Refer to P. 7 for the dynamic allowable moment.)
TTA-A2-40-40
Tabletop Robot/Gate type 2-axis specification
XY-axes: 400mm
Name Model Reference page
Not used E
Expansion PIO board (NPN specification)* NP
Expansion PIO board (PNP specification)* PN
DeviceNet connection board DV
CC-Link connection board CC
PROFIBUS-DP connection board PR
EtherNet/IP connection board* EP
HS: Home confirmation sensor
NM: Non-motor side specification
Refer to the expansion
I/O slot table below.
* If the expansion I/O slot is not used, enter E.
40 : 400mm 40 : 400mm 0:None
2:2m
3:3m
5:5m
PU: Mating plug (No cable)
1: Power supply cable for 100 VAC (2m)
2: Power supply cable for 200 VAC (2m)
NP: NPN specification
PN: PNP specification
Refer to
P.5.
A2: 2 axes
(Gate) I: Incremental
specification
TTA
Series
I
Encoder
type
40
X-axis stroke
40
Y-axis
stroke
A2
Type X-axis
option
Y-axis
option
Option Standard
I/O Slot
Expansion
I/O Slot 1
Expansion
I/O Slot 2
I/O Cable
length
Power Supply
Cable Specification
Dimensions
You can download CAD drawings
from our website.
2D
CAD
2D
CAD
* Coming soon
Home
Home
(R
e
a
m
e
r
P
it
c
h
T
o
le
r
a
n
c
e
0
.0
2
)
(R
e
a
m
e
r
P
it
c
h
T
o
le
r
a
n
c
e
0
.0
2
)
2-5, H7, Depth 5
2-5, H7, Depth 5
6-M5, Depth 7
6-M5, Depth 7
4-M4, Depth 7
T-Groove x 2
6-M4, Depth 7
Detail Diagram S (Detail of X-axis Slider)
Detail Diagram U (Detail of Y-axis Slider)
X View (T-Groove on the Side of the Main Unit)
T-Groove (Same Profile on the Opposite Side)
Profile of T-Groove on the Frame
X View
T-Groove x 2
Dial for Y-Slider Position Tuning
T-Groove x 2
(Same Profile on the Opposite Side on the Frame)
Caution
* During home return, the slider moves to
the ME, so be careful to prevent contact
with surrounding parts.
SE: Stroke end
ME: Mechanical end
Model
Specifcation
Items
11 TTA-A2-50-50
Applicable Controller Specifications
Expansion I/O Slot Common specifications
Drive system Ball screw (12mm, rolled C10) Speed increased at 1.5:1 using a timing belt
Positioning repeatability 0.02mm (Note 2)
Lost motion 0.1mm or less
Guide Ball-circulation type linear guide
Dynamic allowable moment
(Note 3)
X-axis: Ma: 15.9 N
.
m Mb: 15.9 N
.
m Mc: 32.0 N
.
m
Y-axis: Ma: 12.6 N
.
m Mb: 12.6 N
.
m Mc: 37.4 N
.
m
Ambient temperature/humidity 0 to 40C, 85% RH max.(non-condensing)
Actuator weight 44kg
Model/Specifications
* In the above model number, 1 and 2 indicate the XY-axis options, 3 indicates the standard slot, 4 and 5 indicate the expansion slots, 6 indicates the I/O cable length, 7 indicates the power supply cable specification, and 8 indicates the selected option(s).
Model number Axis configuration Encoder type Motor type Lead (mm) Stroke (mm) Speed (mm/sec)
Payload (kg)
(Note 1)
TTA-A2-I-50 1 -50 2 - 3 - 4 - 5 - 6 - 7 - 8
X-axis
Incremental Pulse motor
16 500 1~800 20
Y-axis 16 500 1~800 10
Applicable
controller
Maximum
number of
controlled axes
Compatible
encoder type
Program
operation
Power-supply
voltage
Page
Built-in 2 axes Incremental Program
AC100V
AC200V
P16
* Refer to P. 5 for the details of model specification items.
(Note 1) The maximum speed cannot be achieved based on the maximum payload setting. The
payload decreases when the speed is increased. Also note that the maximum
acceleration/deceleration varies depending on the payload. (Refer to P. 6.)
(Note 2) It is limited to when the actuator temperature is constant. It does not guarantee the absolute
accuracy.
(Note 3) The dynamic allowable moment is a value of each axis assuming a traveling life of 5,000km.
(Refer to P. 7 for the dynamic allowable moment.)
TTA-A2-50-50
Tabletop Robot/Gate type 2-axis specification
XY-axes: 500mm
Name Model Reference page
Not used E
Expansion PIO board (NPN specification)* NP
Expansion PIO board (PNP specification)* PN
DeviceNet connection board DV
CC-Link connection board CC
PROFIBUS-DP connection board PR
EtherNet/IP connection board* EP
HS: Home confirmation sensor
NM: Non-motor side specification
Refer to the expansion
I/O slot table below.
* If the expansion I/O slot is not used, enter E.
50 : 500mm 50 : 500mm 0:None
2:2m
3:3m
5:5m
PU: Mating plug (No cable)
1: Power supply cable for 100 VAC (2m)
2: Power supply cable for 200 VAC (2m)
NP:NPN specification
PN:PNP specification
Refer to
P.5.
A2: 2 axes
(Gate)
I: Incremental
specification
TTA
Series
I
Encoder
type
50
X-axis
stroke
50
Y-axis
stroke
A2
Type X-axis
option
Y-axis
option
Option Standard
I/O Slot
Expansion
I/O Slot 1
Expansion
I/O Slot 2
I/O Cable
length
Power Supply Cable
Specification
* Coming soon
Dimensions
You can download CAD drawings
from our website.
2D
CAD
2D
CAD
Home
Home
X View
T-Groove x 2
Profile of T-Groove on the Frame
(R
e
a
m
e
r
P
it
c
h
T
o
le
r
a
n
c
e
0
.0
2
)
(R
e
a
m
e
r
P
it
c
h
T
o
le
r
a
n
c
e
0
.0
2
)
2-5, H7, Depth 5
2-5, H7, Depth 5
6-M5, Depth 7
6-M5, Depth 7
4-M4, Depth 7
T-Groove x 2
6-M4, Depth 7
Detail Diagram S (Detail of X-axis Slider)
Detail Diagram U (Detail of Y-axis Slider)
Dial for Y-Slider Position Tuning
T-Groove (Same Profile on the Opposite Side)
T-Groove x 2
(Same Profile on the Opposite Side on the Frame)
X View (T-Groove on the Side of the Main Unit)
Caution
* During home return, the slider moves to
the ME, so be careful to prevent contact
with surrounding parts.
SE: Stroke end
ME: Mechanical end
Model
Specifcation
Items
Model/Specifications
Model number Axis configuration Encoder type Motor type Lead (mm) Stroke (mm) Speed (mm/sec)
Payload (kg)
(Note 1)
TTA-A3-I-20 1 -20 2 - 3 B 4 - 5 - 6 - 7 - 8 - 9 - 10
X-axis
Incremental Pulse motor
16 200 1~800 20
Y-axis 16 200 1~800
Z-axis 12 100/150 1~400 5
TTA-A3-20-20 12
Applicable Controller Specifications
Expansion I/O Slot
Common specifications
Drive system
X/Y/Z-axis ball screw (X/Y-axis: 12mm, Z-axis: 10mm, rolled C10)
X-axis and Y-axis speeds increased at 1.5:1 using a timing belt
Positioning repeatability 0.02mm (Note 2)
Lost motion 0.1mm or less
Guide Ball-circulation type linear guide
Dynamic allowable moment
(Note 3)
X-axis: Ma: 15.9 N
.
m Mb: 15.9 N
.
m Mc: 32.0 N
.
m
Z-axis: Ma: 9.7 N
.
m Mb: 9.7 N
.
m Mc: 20.5 N
.
m
Ambient temperature/humidity 0 to 40C, 85% RH max.(non-condensing)
Actuator weight 27kg
* In the above model number, 1 and 2 indicate the XY-axis options, 3 indicates the Z-axis stroke, 4 indicates the Z-axis option(s), 5 indicates the standard slot, 6 and 7 indicate the expansion slots, 8 indicates the I/O cable length, 9 indicates the
power supply cable specification, and 10 indicates the selected option(s).
Applicable
controller
Maximum
number of
controlled axes
Compatible
encoder type
Program
operation
Power-supply
voltage
Page
Built-in 3 axes Incremental Program
AC100V
AC200V
P16
TTA-A3-20-20
Tabletop Robot/Cantilever type 3-axis specification
XY-axes: 200mm, Z-axis: 100mm/150mm
* Refer to P. 5 for the details of model specification items.
(Note 1) The maximum speed cannot be achieved based on the maximum payload setting. The
payload decreases when the speed is increased. Also note that the maximum
acceleration/deceleration varies depending on the payload. (Refer to P. 6.)
(Note 2) It is limited to when the actuator temperature is constant. It does not guarantee the absolute
accuracy.
(Note 3) The dynamic allowable moment is a value of each axis assuming a traveling life of 5,000km.
(Refer to P. 7 for the dynamic allowable moment.)
HS: Home confirmation sensor
NM: Non-motor side specification
B: Brake (Standard)
HS: Home confirmation sensor
NM: Non-motor side specification
Refer to the expansion
I/O slot table below.
* If the expansion I/O
slot is not used, enter E.
20 : 200mm 20 : 200mm 10 : 100mm
15 : 150mm
0:None
2:2m
3:3m
5:5m
PU: Mating plug (No cable)
1: Power supply cable for 100 VAC (2m)
2: Power supply cable for 200 VAC (2m)
NP: NPN specification
PN: PNP specification
Refer to
P.5.
A3: 3-axis
(Cantilever)
I: Incremental
specification
TTA
Series
I
Encoder
type
20
X-axis
stroke
20
Y-axis
stroke
Z-axis
stroke
A3
Type X-axis
option
Y-axis
option
Z-axis
option
Option Standard
I/O Slot
Expansion
I/O Slot 1
Expansion
I/O Slot 2
I/O Cable
length
Power Supply Cable
Specification
Name Model Reference page
Not used E
Expansion PIO board (NPN specification)* NP
Expansion PIO board (PNP specification)* PN
DeviceNet connection board DV
CC-Link connection board CC
PROFIBUS-DP connection board PR
EtherNet/IP connection board* EP
* Coming soon
Dimensions
You can download CAD drawings
from our website.
2D
CAD
2D
CAD
Home
Home
Home
Profile of T-Groove on the Frame
X View
T-Groove x 2
Detail Diagram S (Detail of X-axis Slider)
Detail Diagram U (Detail of Z-axis Slider)
Dial for Y-Slider
Position Tuning
T-Groove (Same Profile on the Opposite Side)
T-Groove x 2
X View (T-Groove on the Side of the Main Unit)
Dial for Z-Slider
Position Tuning
2-5, H7, Depth 5
2-5, H7, Depth 5
6-M5, Depth 7
4-M5, Depth 7
4-M4, Depth 7
6-M4, Depth 7
(
R
e
a
m
e
r
P
it
c
h
T
o
le
r
a
n
c
e
0
.
0
2
)
(Reamer Pitch Tolerance 0.02)
Caution
* During home return, the slider moves to
the ME, so be careful to prevent contact
with surrounding parts.
SE: Stroke end
ME: Mechanical end
Model
Specifcation
Items
* In the above model number, 1 and 2 indicate the XY-axis options, 3 indicates the Z-axis stroke, 4 indicates the Z-axis option(s), 5 indicates the standard slot, 6 and 7 indicate the expansion slots, 8 indicates the I/O cable length, 9 indicates the
power supply cable specification, and 10 indicates the selected option(s).
Expansion I/O Slot Common specifications
Drive system
X/Y/Z-axis ball screw (X/Y-axis: 12mm, Z-axis: 10mm, rolled C10)
X-axis and Y-axis speeds increased at 1.5:1 using a timing belt
Positioning repeatability 0.02mm (Note 2)
Lost motion 0.1mm or less
Guide Ball-circulation type linear guide
Dynamic allowable moment
(Note 3)
X-axis: Ma: 15.9 N
.
m Mb: 15.9 N
.
m Mc: 32.0 N
.
m
Z-axis: Ma: 9.7 N
.
m Mb: 9.7 N
.
m Mc: 20.5 N
.
m
Ambient temperature/humidity 0 to 40C, 85% RH max.(non-condensing)
Actuator weight 34kg
Model/Specifications
Model number Axis configuration Encoder type Motor type Lead (mm) Stroke (mm) Speed (mm/sec)
Payload (kg)
(Note 1)
TTA-A3-I-30 1 -30 2 - 3 B 4 - 5 - 6 - 7 - 8 - 9 - 10
X-axis
Incremental Pulse motor
16 300 1~800 20
Y-axis 16 300 1~800
Z-axis 12 100/150 1~400 5
* Refer to P. 5 for the details of model specification items.
TTA-A3-30-30
Tabletop Robot/Gate type 3-axis specification
XY-axes: 300mm, Z-axis: 100mm/150mm
Name Model Reference page
Not used E
Expansion PIO board (NPN specification)* NP
Expansion PIO board (PNP specification)* PN
DeviceNet connection board DV
CC-Link connection board CC
PROFIBUS-DP connection board PR
EtherNet/IP connection board* EP
HS: Home confirmation sensor
NM: Non-motor side specification
B: Brake (Standard)
HS: Home confirmation sensor
NM: Non-motor side specification
Refer to the expansion
I/O slot table below.
* If the expansion
I/O slot is not used, enter E.
30 : 300mm 30 : 300mm
10 : 100mm
15 : 150mm
0: None
2:2m
3:3m
5:5m
PU: Mating plug (No cable)
1: Power supply cable for 100 VAC (2m)
2: Power supply cable for 200 VAC (2m)
NP: NPN specification
PN: PNP specification
Refer to
P.5.
A3: 3-axis
(Gate)
I: Incremental
specification
TTA
Series
I
Encoder
type
30
X-axis
stroke
30
Y-axis
stroke
Z-axis
stroke
A3
Type X-axis
option
Y-axis
option
Z-axis
option
Option Standard
I/O Slot
Expansion
I/O Slot 1
Expansion
I/O Slot 2
I/O Cable
length
Power Supply
Cable Specification
* Coming soon
Dimensions
You can download CAD drawings
from our website.
2D
CAD
2D
CAD
Home
Home
Home
Profile of T-Groove on the Frame
(R
e
a
m
e
r
P
it
c
h
T
o
le
r
a
n
c
e
0
.0
2
)
(Reamer Pitch Tolerance 0.02)
Dial for Z-Slider
Position Tuning
6-M5, Depth 7
4-M5, Depth 7
4-M4, Depth 7
T-Groove x 2
6-M4, Depth 7
2-5, H7, Depth 5
2-5, H7, Depth 5
Detail Diagram S (Detail of X-axis Slider)
Detail Diagram U (Detail of Z-axis Slider)
T-Groove x 2
(Same Profile on the
Opposite Side on the Frame)
T-Groove (Same Profile on the Opposite Side)
X View
T-Groove x 2
Dial for Y-Slider
Position Tuning
X View (T-Groove on the Side of the Main Unit)
13 TTA-A3-30-30
Applicable Controller Specifications
Applicable
controller
Maximum
number of
controlled axes
Compatible
encoder type
Program
operation
Power-supply
voltage
Page
Built-in 3 axes Incremental Program
AC100V
AC200V
P16
(Note 1) The maximum speed cannot be achieved based on the maximum payload setting. The
payload decreases when the speed is increased. Also note that the maximum
acceleration/deceleration varies depending on the payload. (Refer to P. 6.)
(Note 2) It is limited to when the actuator temperature is constant. It does not guarantee the absolute
accuracy.
(Note 3) The dynamic allowable moment is a value of each axis assuming a traveling life of 5,000km.
(Refer to P. 7 for the dynamic allowable moment.)
Caution
* During home return, the slider moves to
the ME, so be careful to prevent contact
with surrounding parts.
SE: Stroke end
ME: Mechanical end
Model
Specifcation
Items
* In the above model number, 1 and 2 indicate the XY-axis options, 3 indicates the Z-axis stroke, 4 indicates the Z-axis option(s), 5 indicates the standard slot, 6 and 7 indicate the expansion slots, 8 indicates the I/O cable length, 9 indicates the
power supply cable specification, and 10 indicates the selected option(s).
Model/Specifications
Model number Axis configuration Encoder type Motor type Lead (mm) Stroke (mm)
Speed
(mm/sec)
Payload (kg)
(Note 1)
TTA-A3-I-40 1 -40 2 - 3 B 4 - 5 - 6 - 7 - 8 - 9 - 10
X-axis
Incremental Pulse motor
16 400 1~800 20
Y-axis 16 400 1~800
Z-axis 12 100/150 1~400 5
Expansion I/O Slot Common specifications
Drive system
X/Y/Z-axis ball screw (X/Y-axis: 12mm, Z-axis: 10mm, rolled C10)
X-axis and Y-axis speeds increased at 1.5:1 using a timing belt
Positioning repeatability 0.02mm (Note 2)
Lost motion 0.1mm or less
Guide Ball-circulation type linear guide
Dynamic allowable moment
(Note 3)
X-axis: Ma: 15.9 N
.
m Mb: 15.9 N
.
m Mc: 32.0 N
.
m
Z-axis: Ma: 9.7 N
.
m Mb: 9.7 N
.
m Mc: 20.5 N
.
m
Ambient temperature/humidity 0 to 40C, 85% RH max.(non-condensing)
Actuator weight 40kg
* Refer to P. 5 for the details of model specification items.
TTA-A3-40-40
Tabletop Robot/Gate type 3-axis specification
XY-axes: 400mm, Z-axis: 100mm/150mm
Name Model Reference page
Not used E
Expansion PIO board (NPN specification)* NP
Expansion PIO board (PNP specification)* PN
DeviceNet connection board DV
CC-Link connection board CC
PROFIBUS-DP connection board PR
EtherNet/IP connection board* EP
HS: Home confirmation sensor
NM: Non-motor side specification
B: Brake (Standard)
HS: Home confirmation sensor
NM: Non-motor side specification
Refer to the expansion I/O
slot table below.
* If the expansion I/O slot is
not used, enter E.
40 : 400mm 40 : 400mm 10 : 100mm
15 : 150mm
0: None
2:2m
3:3m
5:5m
PU: Mating plug (No cable)
1: Power supply cable for 100 VAC (2m)
2: Power supply cable for 200 VAC (2m)
NP: NPN specification
PN: PNP specification
Refer to
P.5.
A3: 3-axis
(Gate)
I: Incremental
specification
TTA
Series
I
Encoder
type
40
X-axis
stroke
40
Y-axis
stroke
Z-axis
stroke
A3
Type X-axis
option
Y-axis
option
Z-axis
option
Option Standard
I/O Slot
Expansion
I/O Slot 1
Expansion
I/O Slot 2
I/O Cable
length
Power Supply
Cable Specification
* Coming soon
Dimensions
You can download CAD drawings
from our website.
2D
CAD
2D
CAD
Home
Profile of T-Groove on the Frame
X View
T-Groove x 2
Dial for Z-Slider
Position Tuning
(R
e
a
m
e
r
P
it
c
h
T
o
le
r
a
n
c
e
0
.0
2
)
(Reamer Pitch Tolerance 0.02)
6-M5, Depth 7
6-M4, Depth 7
2-5, H7, Depth 5
2-5, H7, Depth 5
T-Groove x 2
4-M5, Depth 7
4-M4, Depth 7
Detail Diagram S (Detail of X-axis Slider)
Detail Diagram U (Detail of Z-axis Slider)
X View (T-Groove on the Side of the Main Unit)
TTA-A3-40-40 14
Applicable Controller Specifications
Applicable
controller
Maximum
number of
controlled axes
Compatible
encoder type
Program
operation
Power-supply
voltage
Page
Built-in 3 axes Incremental Program
AC100V
AC200V
P16
(Note 1) The maximum speed cannot be achieved based on the maximum payload setting. The
payload decreases when the speed is increased. Also note that the maximum
acceleration/deceleration varies depending on the payload. (Refer to P. 6.)
(Note 2) It is limited to when the actuator temperature is constant. It does not guarantee the absolute
accuracy.
(Note 3) The dynamic allowable moment is a value of each axis assuming a traveling life of 5,000km.
(Refer to P. 7 for the dynamic allowable moment.)
Caution
Home
Home
T-Groove (Same Profile on the Opposite Side)
Dial for Y-Slider
Position Tuning
T-Groove x 2
(Same Profile on the Opposite
Side on the Frame)
* During home return, the slider moves to
the ME, so be careful to prevent contact
with surrounding parts.
SE: Stroke end
ME: Mechanical end
Model
Specifcation
Items
Model number Axis configuration Encoder type Motor type Lead (mm) Stroke (mm) Speed (mm/sec)
Payload (kg)
(Note 1)
TTA-A3-I-50 1 -50 2 - 3 B 4 - 5 - 6 - 7 - 8 - 9 - 10
X-axis
Incremental Pulse motor
16 500 1~800 20
Y-axis 16 500 1~800
Z-axis 12 100/150 1~400 5
Applicable Controller Specifications
Expansion I/O Slot Common specifications
Drive system
X/Y/Z-axis ball screw (X/Y-axis: 12mm, Z-axis: 10mm, rolled C10)
X-axis and Y-axis speeds increased at 1.5:1 using a timing belt
Positioning repeatability 0.02mm (Note 2)
Lost motion 0.1mm or less
Guide Ball-circulation type linear guide
Dynamic allowable moment
(Note 3)
X-axis: Ma: 15.9 N
.
m Mb: 15.9 N
.
m Mc: 32.0 N
.
m
Z-axis: Ma: 9.7 N
.
m Mb: 9.7 N
.
m Mc: 20.5 N
.
m
Ambient temperature/humidity 0 to 40C, 85% RH max.(non-condensing)
Actuator weight 47kg
Model/Specifications
Applicable
controller
Maximum
number of
controlled axes
Compatible
encoder type
Program
operation
Power-supply
voltage
Page
Built-in 3 axes Incremental Program
AC100V
AC200V
P16
* Refer to P. 5 for the details of model specification items.
(Note 1) The maximum speed cannot be achieved based on the maximum payload setting. The
payload decreases when the speed is increased. Also note that the maximum
acceleration/deceleration varies depending on the payload. (Refer to P. 6.)
(Note 2) It is limited to when the actuator temperature is constant. It does not guarantee the absolute
accuracy.
(Note 3) The dynamic allowable moment is a value of each axis assuming a traveling life of 5,000km.
(Refer to P. 7 for the dynamic allowable moment.)
TTA-A3-50-50
Tabletop Robot/Gate type 3-axis specification
XY-axes: 500mm, Z-axis: 100mm/150mm
Name Model Reference page
Not used E
Expansion PIO board (NPN specification)* NP
Expansion PIO board (PNP specification)* PN
DeviceNet connection board DV
CC-Link connection board CC
PROFIBUS-DP connection board PR
EtherNet/IP connection board* EP
HS: Home confirmation sensor
NM: Non-motor side specification
B: Brake (Standard)
HS: Home confirmation sensor
NM: Non-motor side specification
Refer to the expansion
I/O slot table below.
* If the expansion I/O slot
is not used, enter E.
50 : 500mm 50 : 500mm 10 : 100mm
15 : 150mm
0:None
2:2m
3:3m
5:5m
PU: Mating plug (No cable)
1: Power supply cable for 100 VAC (2 m)
2: Power supply cable for 200 VAC (2 m)
NP: NPN specification
PN: PNP specification
Refer to
P.5.
A3: 3-axis
(Gate)
I: Incremental
specification
TTA
Series
I
Encoder
type
50
X-axis
stroke
50
Y-axis
stroke
Z-axis
stroke
A3
Type X-axis
option
Y-axis
option
Z-axis
option
Option Standard
I/O Slot
Expansion
I/O Slot 1
Expansion
I/O Slot 2
I/O Cable
length
Power Supply Cable
Specification
15 TTA-A3-50-50
* Coming soon
Dimensions
You can download CAD drawings
from our website.
2D
CAD
2D
CAD
Home
Profile of T-Groove on the Frame
Dial for Z-Slider
Position Tuning
2-5, H7, Depth 5
(R
e
a
m
e
r
P
it
c
h
T
o
le
r
a
n
c
e
0
.0
2
)
6-M5, Depth 7
6-M4, Depth 7
Detail Diagram S (Detail of X-axis Slider)
2-5, H7, Depth 5
(Reamer Pitch Tolerance 0.02)
4-M5, Depth 7
4-M4, Depth 7
Detail Diagram U (Detail of Z-axis Slider)
T-Groove x 2
X View (T-Groove on the the Side of the Main Unit)
Home
Home
X View
T-Groove x 2
T-Groove x 2
(Same Profile on
the Opposite Side on the Frame)
Dial for Y-Slider
Position Tuning
T-Groove (Same Profile on the Opposite Side)
Caution
* During home return, the slider moves to
the ME, so be careful to prevent contact
with surrounding parts.
SE: Stroke end
ME: Mechanical end
* In the above model number, 1 and 2 indicate the XY-axis options, 3 indicates the Z-axis stroke, 4 indicates the Z-axis option(s), 5 indicates the standard slot, 6 and 7 indicate the expansion slots, 8 indicates the I/O cable length, 9 indicates the
power supply cable specification, and 10 indicates the selected option(s).
Model
Specifcation
Items
Tabletop Robot Series Controller Specifications
Controller Specification
Item
Motor type Pulse motor (Servo control)
Applicable encoder Incremental encoder
Data-storage device Flash ROM/FRAM
Number of program steps 9,999
Number of positions 30,000
Number of programs 255
Number of multi-tasking programs 16
Operation mode
Serial communication
Program
Positioner
Pulse train
SIO interface
Communication method RS232
Baud rate 9.6, 19.2, 38.4, 57.6, 76.8, 115.2kpps
Live wire
insertion/removal
TP port
USB
Standard I/O
Interface
Input
specification
Number of input 16 points
Input voltage DC24V10%
Input current 7 mA per circuit
ON voltage Min. DC16V
OFF voltage Max. DC5V
Leak current Allowable leak current: 1 mA max.
Isolation method Photocoupler isolation
Output
specification
Number of output 16 points
Load voltage DC24V10%
Maximum current 100 mA per point, 400 mA per 8 points Note 1
Saturated voltage Max.3V
Leak current Max 0.1 mA
Isolation method Photocoupler isolation
Conforming expansion I/O
interfaces
Expansion PIO NPN specification (16IN/16OUT)
Expansion PIO PNP specification (16IN/16OUT)
CC-Link (remote device)
DeviceNet
PROFIBUS-DP
EtherNet/IP
Brake output voltage DC24V10%
Connectable brake power Max.5W
Calendar/clock function
Retention time Approx. 10 days
Charge time Approx. 100 hours
Protective functions Monitoring of overcurrent, fan speed drop, etc.
Note 1: The total load current for every 8 points from Standard I/O No. 316 is 400 mA. (The maximum value per point is 100 mA.)
16
17
Tabletop Robot Series PIO Signal Table
Pin No. Classification Assignment Pin No. Classification Assignment
1A 24V * P24 1B
Output
OUT0
2A 24V * P24 2B OUT1
3A - - 3B OUT2
4A - - 4B OUT3
5A
Input
IN0 5B OUT4
6A IN1 6B OUT5
7A IN2 7B OUT6
8A IN3 8B OUT7
9A IN4 9B OUT8
10A IN5 10B OUT9
11A IN6 11B OUT10
12A IN7 12B OUT11
13A IN8 13B OUT12
14A IN9 14B OUT13
15A IN10 15B OUT14
16A IN11 16B OUT15
17A IN12 17B - -
18A IN13 18B - -
19A IN14 19B 0V * N
20A IN15 20B 0V * N
* [24 V]/[0 V] (not connected to the service power) must be supplied with power even when the service
power output is ON.
Pin No. Classification Assignment Pin No. Classification Assignment
1A 24V * P24 1B
Output
OUT0
2A 24V * P24 2B OUT1
3A - - 3B OUT2
4A - - 4B OUT3
5A
Input
IN0 5B OUT4
6A IN1 6B OUT5
7A IN2 7B OUT6
8A IN3 8B OUT7
9A IN4 9B OUT8
10A IN5 10B OUT9
11A IN6 11B OUT10
12A IN7 12B OUT11
13A IN8 13B OUT12
14A IN9 14B OUT13
15A IN10 15B OUT14
16A IN11 16B OUT15
17A IN12 17B - -
18A IN13 18B - -
19A IN14 19B 0V * N
20A IN15 20B 0V * N
* [24 V]/[0 V] indicates the 24-V power input when the service power output is OFF, or 24-V power output
when the service power output is ON.
* [24 V]/[0 V] must not be connected to an external power supply when the service power output is ON.
PIO Signal Table
Expansion PIO Connector Pin Layout
I/O cable (CB-PAC-PIO )
Standard PIO Connector Pin Layout
* Enter the cable length (L) in . Lengths up to 10 m are supported.
Example) 080 = 8 m
No
connector
No
connector
Flat Cable (20-core) x 2
Half Pitch MIL Socket
HIF6-40D-1.27R (Hirose)
HIF6-40D-1.27R
No
Signal
Name
Cable
Color
Wiring No
Signal
Name
Cable
Color
Wiring
1A 24V Brown-1
Flat Cable A
(Crimped)
1B OUT0 Brown-3
Flat Cable B
(Crimped)
AWG28
2A 24V Red-1 2B OUT1 Red-3
3A - Orange-1 3B OUT2 Orange-3
4A - Yellow-1 4B OUT3 Yellow-3
5A IN0 Green-1 5B OUT4 Green-3
6A IN1 Blue-1 6B OUT5 Blue-3
7A IN2 Purple-1 7B OUT6 Purple-3
8A IN3 Gray-1 8B OUT7 Gray-3
9A IN4 White-1 9B OUT8 White-3
10A IN5 Black-1 10B OUT9 Black-3
11A IN6 Brown-2 11B OUT10 Brown-4
12A IN7 Red-2 12B OUT11 Red-4
13A IN8 Orange-2 13B OUT12 Orange-4
14A IN9 Yellow-2 14B OUT13 Yellow-4
15A IN10 Green-2 15B OUT14 Green-4
16A IN11 Blue-2 16B OUT15 Blue-4
17A IN12 Purple-2 17B - Purple-4
18A IN13 Gray-2 18B - Gray-4
19A IN14 White-2 19B 0V White-4
20A IN15 Black-2 20B 0V Black-4
18
I/O Wiring Diagram (Standard PIO)
Item Specification
Input voltage 24 VDC + 10%
Input current 7 mA/circuit
ON/OFF voltages ON voltage---16.0 VDC min., OFF voltage---5.0 VDC max.
Isolation method Photocoupler isolation
* The circuit diagram below assumes that the power is input externally (the service power output is OFF).
* In the circuit diagram below, the port numbers conform to the standard factory settings.
* The allowable leak current is 1 mA when the input is OFF.
Item Specification
Input voltage 24 VDC + 10%
Input current 7 mA/circuit
ON/OFF voltages ON voltage---8.0 VDC max., OFF voltage---19.0 VDC min.
Isolation method Photocoupler isolation
* The circuit diagram below assumes that the power is input externally (the service power output is OFF).
* In the circuit diagram below, the port numbers conform to the standard factory settings.
* The allowable leak current is 1 mA when the input is OFF.
Item Specification
Load voltage 24 VDC
TD62084
(or equivalent)
Maximum load current 100 mA/point, 400 mA/8 ports Note)
Leak current 0.1 mA/point max.
Isolation method Photocoupler isolation
* The circuit diagram assumes that the power is input externally (the service power output is OFF).
* In the circuit diagram below, the port numbers conform to the standard factory settings.
Note: The total load current for every 8 points from Standard I/O No. 316 is 400 mA.
(The maximum value per point is 100 mA.)
Item Specification
Load voltage 24 VDC
TD62783
(or equivalent)
Maximum load current 100 mA/point, 400 mA/8 ports Note)
Leak current 0.1 mA/point max.
Isolation method Photocoupler isolation
* The circuit diagram assumes that the power is input externally (the service power output is OFF).
* In the circuit diagram below, the port numbers conform to the standard factory settings.
Note: The total load current for every 8 points from Standard I/O No. 316 is 400 mA.
(The maximum value per point is 100 mA.)
Input Part: External input specification (NPN specification)
Input Part: External input specification (PNP specification)
Output Part: External output specification (NPN specification)
Output Part: External output specification (PNP specification)
[Input circuit]
[Input circuit]
[Output circuit]
[Output circuit]
Pin No.1A, 2A
Pin No.1A, 2A
Pin No.1A, 2A
Output
terminal
Output
terminal
Load
Load
Pin No. 19B, 20B
Pin No. 19B, 20B
Port No.
316 to 331
Port No.
316 to 331
External
power
supply:
24 VDC
10%
External
power
supply:
24 VDC
10%
External
power
supply:
24 VDC
10%
External
power
supply:
24 VDC
10%
Input terminal
Port No.016 to 031
Input terminal
Port No.016 to 031
I
n
t
e
r
n
a
l
c
i
r
c
u
i
t
I
n
t
e
r
n
a
l
c
i
r
c
u
i
t
I
n
t
e
r
n
a
l
c
i
r
c
u
i
t
I
n
t
e
r
n
a
l
c
i
r
c
u
i
t
19
I/O Wiring Diagram (Expansion PIO)
Item Specification
Number of input 16 points
Input voltage 24 VDC + 10%
Input current 4 mA/circuit
ON/OFF voltages
ON voltage---18.0 VDC min. (3.5 mA),
OFF voltage---6.0 VDC max. (1 mA)
Isolation method Photocoupler isolation
Item Specification
Number of output 16 points
Rated load voltage 24 VDC
Maximum current 50 mA/circuit
Isolation method Photocoupler isolation
Input Part: External input specification Output Part: External output specification
[NPN specification] [NPN specification]
[PNP specification] [PNP specification]
Logic
circuit
Logic
circuit
Internal
circuit
Internal
circuit Output
terminal
Output
terminal
Load
Load
External power
supply: 24 VDC
External power
supply: 24 VDC
Internal
circuit
Internal
circuit
Each input
Each input
Each input
Each input
20
I/O Interface
Rear
Standard I/O slot Standard PIO (Input 16 points/output 16 points)
Expansion I/O slot 1 [Option] Expansion PIO (Input 16 points/output 16 points), or Field Network (*1)
Expansion I/O slot 2 [Option] Expansion PIO (Input 16 points/output 16 points), or Field Network (*1)
System I/O slot Emergency stop input 2 contacts, enable input 2 contacts
Motor power I/O connector For cutting off external drive power
*1: For field network (CC-Link, DeviceNet, PROFIBUS-DP or EtherNet/IP) connection, the maximum number of input points is 240 and maximum number of output points is 240.
EtherNet/IP + EtherNet/IP is not supported.
Connect the vision system to EtherNet/IP.
Tabletop Robot Series Name of Each Part
Expansion I/O Slot 1 (I/O 2)
Expansion I/O Slot 1 (I/O 2) Status LED
Expansion I/O Slot 2 (I/O 3)
Service Power Switch
System I/O Connector
Motor Drive Power Line Connector
Standard I/O Slot (I/O 1)
Expansion I/O Slot 2 (I/O 3)
Status LED
Power Inlet and Power Switch Protective Ground Terminal
Front
Mode Switch Brake Release Switch (Axis 3) Panel Window
Digital Program
Selector Switch
Emergency Stop
Pushbutton Switch
Function Switch
(Start Switch)
Teaching Connector USB Connector
21
Tabletop Robot Series Option
Teaching Pendant
Specifications
External Dimensions
PC Software (for Windows PCs only)
Features
Features
Configuration
Configuration
Configuration
Model
number
Model
number
Model
number
A startup support software program offering program/position input
function, test operation function, monitoring function, and more. The
functions needed for debugging have been enhanced to help reduce the
startup time.
IA-101-X-MW (RS232C Cable Included)
IA-101-TTA-USB (USB Cable Included)
IA-101-X-USBMW (USB Conversion adapter + Cable Included)
Note: The TTA series only supports Version 10.0.0.0 or later.
PC Software (CD)
PC Software (CD)
PC Software (CD)
RS232C Cable
CB-ST-E1MW050-EB
USB Cable
CB-SEL-USB030
USB Cable
CB-SEL-USB030
RS232C Cable
CB-ST-E1MW050-EB
Dummy Plug
DP-2
USB Conversion Adapter
IA-CB-USB
Note.
IA-101-TT-USB can be used with the TTA
series by updating the software version.
To make the TTA series compatible with a
safety category, the dummy plug DP-2 is
required.
Rated voltage 24V DC
Operating voltage range 21.6 to 26.4V DC
Power consumption 3.6W or less (150mA or less)
Ambient operating temperature 0 to 50C
Ambient operating humidity 20 to 85% RH (non-condensing)
Ambient storage temperature -20 to 60C
Ambient storage humidity 10 to 85% RH (non-condensing)
Vibration durability
10 to 55Hz (1 minute periods),
double amplitude 0.75mm,
10 minutes each in X/Y/Z directions
Impact durability 147m/s
2
, 11msec, 4 times each in X/Y/Z directions
Environmental resistance IP40 (in initial state)
Weight 507g (TB-01-N; teaching pendant only) (Unit: mm)
Supporting both programmable controllers and position controllers
Easy-to-use design combining a touch panel and keys
3.5" full-color touch panel
SEL programs can be edited
Programs/data can be saved to SD cards
Calendar function
22
Model L1 L2 A
2020 400 430 380
3030 500 530 480
4040 600 630 580
5050 700 730 680
Dummy Plug
I/O Conversion Cable
Actuator Mounting Brackets
(Comes with bolts/nuts for installing the bracket to the actuator)
Features
Features
Dimensions
Model
number
Model
number
Model
number
Connect this plug to the teaching connector to cut off the enable circuit when the
TTA series is linked to a PC using a USB cable.
This conversion cable is used to connect the I/O flat cable (CB-DS-PIO ) for
conventional TT series to the standard I/O slot of the TTA series.
I/O Flat Cable
(CB-DS-PIO )
TTA Standard I/O
DP-2 The plug comes with the PC software (Model IA-101-TTA-USB).
CB-TTA-PIOJ005
TTA-FT-4 for Stroke 20-20/30-30 (Foot bracket, Set of 4 pcs)
TTA-FT-6 for Stroke 40-40/50-50 (Foot bracket, Set of 6 pcs)
The plug supports emergency
stop/enable circuit redundancy
(category 3 or higher).
2-6.5, through
T-Groove length: L2
Bracket
CJ0206-1A-UST-3-0514
IAI America, Inc.
Headquarters: 2690 W. 237th Street, Torrance, CA 90505 (800) 736-1712
Chicago Ofce: 1261 Hamilton Parkway, Itasca, IL 60143 (800) 944-0333
Atlanta Ofce: 1220 Kennestone Circle, Suite 108, Marietta, GA 30066 (888) 354-9470
www.intelligentactuator.com
IAI Industrieroboter GmbH
Ober der Rth 4, D-65824 Schwalbach am Taunus, Germany
IAI Robot (Thailand), CO., Ltd.
825 PhairojKijja Tower 12th Floor, Bangna-Trad RD.,
Bangna, Bangna, Bangkok 10260, Thailand
The information contained in this product brochure may change without prior notice due to product improvements.
You might also like
- Jolly Phonics Teaching Reading and WritingDocument6 pagesJolly Phonics Teaching Reading and Writingmarcela33j5086100% (1)
- 50 Cool Stories 3000 Hot Words (Master Vocabulary in 50 Days) For GRE Mba Sat Banking SSC DefDocument263 pages50 Cool Stories 3000 Hot Words (Master Vocabulary in 50 Days) For GRE Mba Sat Banking SSC DefaravindNo ratings yet
- Onsemi ATX PSU DesignDocument37 pagesOnsemi ATX PSU Designusuariojuan100% (1)
- DirtyMobs' Ultimate Matchup GuideDocument5 pagesDirtyMobs' Ultimate Matchup GuideTempest JannaNo ratings yet
- 600 2 Sub-Zero Built-In Series Refrigerator Service ManualDocument188 pages600 2 Sub-Zero Built-In Series Refrigerator Service Manual911servicetechNo ratings yet
- Genos-En CNC OkumaDocument13 pagesGenos-En CNC Okumahggil380250% (2)
- Horizontal Machining Center SpecificationsDocument4 pagesHorizontal Machining Center SpecificationsArvind Kushwaha100% (1)
- Evelyn Nakano Glenn, "From Servitude To Service Work: Historical Continuities in The Racial Division of Paid Reproductive Labor"Document44 pagesEvelyn Nakano Glenn, "From Servitude To Service Work: Historical Continuities in The Racial Division of Paid Reproductive Labor"s0metim3sNo ratings yet
- Avn1200tb Avn1800tb PJ DB GB 14-06-30 HK2052Document2 pagesAvn1200tb Avn1800tb PJ DB GB 14-06-30 HK2052Enri05No ratings yet
- IAI Direct Drive Motor SpecsheetDocument7 pagesIAI Direct Drive Motor SpecsheetElectromateNo ratings yet
- IAI IX Scara 120 150 SpecsheetDocument4 pagesIAI IX Scara 120 150 SpecsheetElectromateNo ratings yet
- IAI ICSA3 ICSPA3 Cartesian CatalogDocument96 pagesIAI ICSA3 ICSPA3 Cartesian CatalogElectromateNo ratings yet
- Dyadic Mechatronics Cylinder CatalogDocument16 pagesDyadic Mechatronics Cylinder CatalogElectromateNo ratings yet
- Dyadic Systems 2011 CatalogDocument16 pagesDyadic Systems 2011 CatalogElectromateNo ratings yet
- IAI DD - Motor - CJ0199-1A-UST-1-1013Document8 pagesIAI DD - Motor - CJ0199-1A-UST-1-1013ElectromateNo ratings yet
- AZ/AZR CNC EDM machines specificationsDocument7 pagesAZ/AZR CNC EDM machines specificationsprofanu1No ratings yet
- Iai Rca Sa4c SpecsheetDocument2 pagesIai Rca Sa4c SpecsheetElectromateNo ratings yet
- Dyadic Systems 2011 CatalogDocument16 pagesDyadic Systems 2011 CatalogServo2GoNo ratings yet
- Afe 2DDocument2 pagesAfe 2DthimhaNo ratings yet
- Catalog Kafo Ka40 PDFDocument8 pagesCatalog Kafo Ka40 PDFFrederik HenderwanzaNo ratings yet
- TYRO109: Quick Start Guide (Diy)Document12 pagesTYRO109: Quick Start Guide (Diy)Francisco ChaoNo ratings yet
- ALN600G_igroove_SPWDocument14 pagesALN600G_igroove_SPWTran ManhNo ratings yet
- Platerite 8600Sl: Thermal Plate RecorderDocument6 pagesPlaterite 8600Sl: Thermal Plate RecorderYuwis AlqarniNo ratings yet
- Iai Rca Ss5d SpecsheetDocument2 pagesIai Rca Ss5d SpecsheetElectromateNo ratings yet
- EMCOMAT PrecisionDocument8 pagesEMCOMAT Precisionnord2500No ratings yet
- Iai CT4 - Cj0194-2a-Ust-1-1213Document16 pagesIai CT4 - Cj0194-2a-Ust-1-1213ElectromateNo ratings yet
- IAI LSAS N10 N15 SpecsheetDocument15 pagesIAI LSAS N10 N15 SpecsheetElectromateNo ratings yet
- IAI IX Scara CatalogDocument47 pagesIAI IX Scara CatalogElectromateNo ratings yet
- Payload: 80 KG: DX100 Controller Powerful Performance in A Mid-Size RobotDocument2 pagesPayload: 80 KG: DX100 Controller Powerful Performance in A Mid-Size RobotRuben AlvaradoNo ratings yet
- Cartea MasiniDocument6 pagesCartea MasiniBolat AurelNo ratings yet
- Latest Toshiba ScaraDocument20 pagesLatest Toshiba ScarareflextechNo ratings yet
- RCS3-CT8C/CTZ5C: ROBO Cylinder High-Speed TypeDocument8 pagesRCS3-CT8C/CTZ5C: ROBO Cylinder High-Speed TypeElectromateNo ratings yet
- AbsoluteEncoders OCD IndustrialEthernet TCP IP DataSheet DataContentDocument10 pagesAbsoluteEncoders OCD IndustrialEthernet TCP IP DataSheet DataContentVoicu Stanese100% (1)
- Prisma Technical GuideDocument61 pagesPrisma Technical Guidenooruddinkhan1No ratings yet
- DENSO Robotics Datasheet Vs 050-060 SeriesDocument2 pagesDENSO Robotics Datasheet Vs 050-060 SeriesJuan David Bolaños AguilarNo ratings yet
- Technical Specification For EP-12PN800 SZ Cabling MachineDocument6 pagesTechnical Specification For EP-12PN800 SZ Cabling Machinemehran khamsehzadehNo ratings yet
- Epson Japan Robots Catalogue - April 2013Document26 pagesEpson Japan Robots Catalogue - April 2013Jorge ResendeNo ratings yet
- Xsel-R/S: Program Controller XSEL Series 8-Axis SpecificationDocument8 pagesXsel-R/S: Program Controller XSEL Series 8-Axis SpecificationElectromateNo ratings yet
- Plotter PDFDocument13 pagesPlotter PDFClifford RyanNo ratings yet
- VA1400 DataSheetDocument2 pagesVA1400 DataSheetVikram DewanganNo ratings yet
- I.16.7 Electromagnetic Flow Meter-JIS 10KDocument8 pagesI.16.7 Electromagnetic Flow Meter-JIS 10KRikrik JajantaraNo ratings yet
- Hitachi Product OverviewDocument10 pagesHitachi Product Overviewlinhcdt3No ratings yet
- ER2GE - 30 - KitoDocument1 pageER2GE - 30 - KitojpallendeNo ratings yet
- BHS TDS RS en - 082014Document1 pageBHS TDS RS en - 082014Petros IosifidisNo ratings yet
- Bosch Conveyor SystemDocument32 pagesBosch Conveyor Systemjd1schroederNo ratings yet
- FS100 ControllerDocument2 pagesFS100 ControllermartinimartiiniNo ratings yet
- Dyadics SCN6 DatasheetDocument2 pagesDyadics SCN6 DatasheetElectromateNo ratings yet
- Instruction Manual Juki LK-1910Document189 pagesInstruction Manual Juki LK-1910Maskusyani100% (2)
- EPX2900Document2 pagesEPX2900Anupam Singh VatsNo ratings yet
- 100 Series Ordering GuideDocument8 pages100 Series Ordering GuideElectromateNo ratings yet
- LPKF ProtoMat S103Document2 pagesLPKF ProtoMat S103jhonny639No ratings yet
- Cidan Lineas de Corte y Cizallas enDocument12 pagesCidan Lineas de Corte y Cizallas enRafael CorcueraNo ratings yet
- PRO SeriesDocument2 pagesPRO SeriesJani CoolNo ratings yet
- E500 Series: E F C PDocument44 pagesE500 Series: E F C Pnghienhugo100% (1)
- IAI CT4 Cartesian SpecsheetDocument15 pagesIAI CT4 Cartesian SpecsheetElectromateNo ratings yet
- Kaltfräse W 200 Slipform Paver SP 25 / SP 25 I: Technische Daten Technical SpecificationDocument8 pagesKaltfräse W 200 Slipform Paver SP 25 / SP 25 I: Technische Daten Technical SpecificationRobertHeningNo ratings yet
- 928TEII Turning Machine CNC SystemDocument0 pages928TEII Turning Machine CNC SystemCNCmakersNo ratings yet
- Atlona: 8X1 Vga + Analog AudioDocument15 pagesAtlona: 8X1 Vga + Analog AudiocarlosNo ratings yet
- Updated New CNC 3040T Router EngraverDocument26 pagesUpdated New CNC 3040T Router EngraverentomophileNo ratings yet
- Clearsec: Manual Full-Height-Turnstile For Internal and Semi-External InstallationDocument5 pagesClearsec: Manual Full-Height-Turnstile For Internal and Semi-External InstallationUsman ZouqueNo ratings yet
- Fanuc 31i-BM Standard Features and Options PDFDocument10 pagesFanuc 31i-BM Standard Features and Options PDFdanielstancu883296No ratings yet
- Hitachi SJ100SeriesSalesBrochureDocument20 pagesHitachi SJ100SeriesSalesBrochuresamanthacheeNo ratings yet
- Compression Test MachineDocument3 pagesCompression Test Machineahana expotech lab abeerNo ratings yet
- RH30 Spec Sep2007Document7 pagesRH30 Spec Sep2007gheoda8926No ratings yet
- AEX300LDocument7 pagesAEX300LxevniNo ratings yet
- Introducing The New VLM-60 Absolute Multi-Turn Encoder From Netzer PrecisionDocument1 pageIntroducing The New VLM-60 Absolute Multi-Turn Encoder From Netzer PrecisionElectromateNo ratings yet
- Electromate Announces Pre-Order Availability of Universal Robots New UR30 Cobot Press ReleaseDocument1 pageElectromate Announces Pre-Order Availability of Universal Robots New UR30 Cobot Press ReleaseElectromateNo ratings yet
- Kollmorgen Debuts EKM Series Servo MotorsDocument1 pageKollmorgen Debuts EKM Series Servo MotorsElectromateNo ratings yet
- New LDL Programmable Linear Actuator From SMAC Moving Coil ActuatorsDocument1 pageNew LDL Programmable Linear Actuator From SMAC Moving Coil ActuatorsElectromateNo ratings yet
- Electromate Partners With Spin Robotics To Offer Cobot Screwdriving Solutions in CanadaDocument1 pageElectromate Partners With Spin Robotics To Offer Cobot Screwdriving Solutions in CanadaElectromateNo ratings yet
- Electromate® Made It Onto The 2021 List of Best Workplaces™ in Professional ServicesDocument2 pagesElectromate® Made It Onto The 2021 List of Best Workplaces™ in Professional ServicesElectromateNo ratings yet
- Electromate Recertified As A Great Place To Work' Press ReleaseDocument1 pageElectromate Recertified As A Great Place To Work' Press ReleaseElectromateNo ratings yet
- Galil Achieves Prestigious UL-CSA Certification For Its Motion Controller SeriesDocument1 pageGalil Achieves Prestigious UL-CSA Certification For Its Motion Controller SeriesElectromateNo ratings yet
- Exor X5 Wireless Press ReleaseDocument1 pageExor X5 Wireless Press ReleaseElectromateNo ratings yet
- New High-Performance Hollow Shaft Gear Unit From Harmonic Drive: The HPF SeriesDocument2 pagesNew High-Performance Hollow Shaft Gear Unit From Harmonic Drive: The HPF SeriesElectromateNo ratings yet
- AMC Release New Micro-Sized FlexPro Servo Drive Model FM060-60C-CMDocument2 pagesAMC Release New Micro-Sized FlexPro Servo Drive Model FM060-60C-CMElectromateNo ratings yet
- Electromate Elated With Win at The 2022 Business Achievement AwardsDocument2 pagesElectromate Elated With Win at The 2022 Business Achievement AwardsElectromateNo ratings yet
- Electromate Recertified For The 2021 Canada's Most Admired Corporate Cultures AwardDocument2 pagesElectromate Recertified For The 2021 Canada's Most Admired Corporate Cultures AwardElectromateNo ratings yet
- Mecademic Robotics Releases New Firmware For Its Meca500 RobotDocument2 pagesMecademic Robotics Releases New Firmware For Its Meca500 RobotElectromateNo ratings yet
- Electromate Extends Its Product Portfolio To Include Robots From MecademicDocument1 pageElectromate Extends Its Product Portfolio To Include Robots From MecademicElectromateNo ratings yet
- Meet The World's Most Precise Six-Axis RobotDocument1 pageMeet The World's Most Precise Six-Axis RobotElectromateNo ratings yet
- Electromate Made It To The 2021 List of Best Workplaces™ in Ontario Press ReleaseDocument2 pagesElectromate Made It To The 2021 List of Best Workplaces™ in Ontario Press ReleaseElectromateNo ratings yet
- ADVANCED Motion Controls Releases 60A Continuous Micro-Sized FlexPro Servo DrivesDocument2 pagesADVANCED Motion Controls Releases 60A Continuous Micro-Sized FlexPro Servo DrivesElectromateNo ratings yet
- New Robotic Cycloidal Gearbox From GAM - New Product Press ReleaseDocument1 pageNew Robotic Cycloidal Gearbox From GAM - New Product Press ReleaseElectromateNo ratings yet
- New Integrated Spindle Drives Available From JVLDocument1 pageNew Integrated Spindle Drives Available From JVLElectromateNo ratings yet
- Excellence Canada Announces Electromate Is A Recipient of The 2021 Canadian Business Excellence Awards For Private BusinessesDocument2 pagesExcellence Canada Announces Electromate Is A Recipient of The 2021 Canadian Business Excellence Awards For Private BusinessesElectromateNo ratings yet
- POSITAL Kit Encoders Certified For Compliance With BiSS Interface StandardsDocument1 pagePOSITAL Kit Encoders Certified For Compliance With BiSS Interface StandardsElectromateNo ratings yet
- New LDL25 Series Linear Actuator From SMAC Moving Coil ActuatorsDocument1 pageNew LDL25 Series Linear Actuator From SMAC Moving Coil ActuatorsElectromateNo ratings yet
- New 100 Amps Peak FlexPro Servo Drives Available From AMCDocument1 pageNew 100 Amps Peak FlexPro Servo Drives Available From AMCElectromateNo ratings yet
- Electromate Extends Its Product Portfolio To Include Collaborative Robots Manufactured by Universal RobotsDocument2 pagesElectromate Extends Its Product Portfolio To Include Collaborative Robots Manufactured by Universal RobotsElectromateNo ratings yet
- Maxon's New IDX Integrated Motor - Power at The Press of A ButtonDocument1 pageMaxon's New IDX Integrated Motor - Power at The Press of A ButtonElectromateNo ratings yet
- Electromate Recognized With 2021 AHTD Foundation AwardDocument1 pageElectromate Recognized With 2021 AHTD Foundation AwardElectromateNo ratings yet
- Netzer Introduce VLP-60 Two-Plate Ring Absolute Encoder For Harsh EnvironmentsDocument1 pageNetzer Introduce VLP-60 Two-Plate Ring Absolute Encoder For Harsh EnvironmentsElectromateNo ratings yet
- ADVANCED Motion Controls Releases The FM060-25-CMDocument1 pageADVANCED Motion Controls Releases The FM060-25-CMElectromateNo ratings yet
- Electromate Inc. Recognized As Canadas Most Admired Corporate Cultures For 2020Document2 pagesElectromate Inc. Recognized As Canadas Most Admired Corporate Cultures For 2020ElectromateNo ratings yet
- Unpacking of StandardsDocument41 pagesUnpacking of StandardsJealf Zenia Laborada CastroNo ratings yet
- United States Court of Appeals, Sixth CircuitDocument5 pagesUnited States Court of Appeals, Sixth CircuitScribd Government DocsNo ratings yet
- Vadiyanatha AstakamDocument4 pagesVadiyanatha AstakamRaga MalikaNo ratings yet
- ArenavirusDocument29 pagesArenavirusRamirez GiovarNo ratings yet
- 59-33 ATO Implementation Journal KSA 100Document18 pages59-33 ATO Implementation Journal KSA 100nicolas valentinNo ratings yet
- Fractional GradingDocument7 pagesFractional Gradingapi-355619062No ratings yet
- Infanrix Hexa RSMKL July 2023Document37 pagesInfanrix Hexa RSMKL July 2023Bayu KurniawanNo ratings yet
- Communicative Strategy Powerpoint CO With VideoDocument20 pagesCommunicative Strategy Powerpoint CO With VideoGlydel Octaviano-GapoNo ratings yet
- ISE I Conversation Task - Rules and RegulationsDocument3 pagesISE I Conversation Task - Rules and RegulationsElena B. HerreroNo ratings yet
- SEO-optimized title for practice test documentDocument4 pagesSEO-optimized title for practice test documentThu GiangNo ratings yet
- Sri Dakshinamurthy Stotram - Hindupedia, The Hindu EncyclopediaDocument7 pagesSri Dakshinamurthy Stotram - Hindupedia, The Hindu Encyclopediamachnik1486624No ratings yet
- Formula Sheet For Astronomy 1 - Paper 1 and Stars & PlanetsDocument2 pagesFormula Sheet For Astronomy 1 - Paper 1 and Stars & PlanetsprashinNo ratings yet
- Ca Final DT (New) Chapterwise Abc & Marks Analysis - Ca Ravi AgarwalDocument5 pagesCa Final DT (New) Chapterwise Abc & Marks Analysis - Ca Ravi AgarwalROHIT JAIN100% (1)
- Librarianship and Professional Ethics: Understanding Standards for Library ProfessionalsDocument12 pagesLibrarianship and Professional Ethics: Understanding Standards for Library ProfessionalsHALLNo ratings yet
- BCOM 302 BookDocument179 pagesBCOM 302 BookHitanshi AgarwalNo ratings yet
- German composer known for political worksDocument4 pagesGerman composer known for political worksGeorge PikNo ratings yet
- Functional Appliances 2018Document45 pagesFunctional Appliances 2018tonhanrhmNo ratings yet
- 4th Singapore Open Pencak Silat Championship 2018-1Document20 pages4th Singapore Open Pencak Silat Championship 2018-1kandi ari zonaNo ratings yet
- LumsDocument52 pagesLumsUmar AliNo ratings yet
- Literature ReviewDocument4 pagesLiterature Reviewapi-549241187No ratings yet
- The Research TeamDocument4 pagesThe Research Teamapi-272078177No ratings yet
- Connectors/Conjunctions: Intermediate English GrammarDocument9 pagesConnectors/Conjunctions: Intermediate English GrammarExe Nif EnsteinNo ratings yet
- Femap-58 Volume2 508Document357 pagesFemap-58 Volume2 508vicvic ortegaNo ratings yet
- ASBMR 14 Onsite Program Book FINALDocument362 pagesASBMR 14 Onsite Program Book FINALm419703No ratings yet