You might also like
- Prácticas de redes de datos e industrialesFrom EverandPrácticas de redes de datos e industrialesRating: 4 out of 5 stars4/5 (5)
- Laboratorio Conexion Serial SIP - I2CDocument10 pagesLaboratorio Conexion Serial SIP - I2CMaury MacíasNo ratings yet
- 100 circuitos de shields para arduino (español)From Everand100 circuitos de shields para arduino (español)Rating: 3.5 out of 5 stars3.5/5 (3)
- Implementación de un reloj en tiempo real usando PIC16F887 y módulo DS3232Document17 pagesImplementación de un reloj en tiempo real usando PIC16F887 y módulo DS3232Ivan Crispin PaucarNo ratings yet
- EspejoRuedaWaldoOmar I2c Telecom500Document18 pagesEspejoRuedaWaldoOmar I2c Telecom500W Omar Espejo RuedaNo ratings yet
- Además, resume de manera concisa el contenido del documento, que trata sobre el diseño de un sistema para la captura y procesamiento de señalesDocument72 pagesAdemás, resume de manera concisa el contenido del documento, que trata sobre el diseño de un sistema para la captura y procesamiento de señalesJuan Andres RuizNo ratings yet
- ComSerial PIC-PC USARTDocument8 pagesComSerial PIC-PC USARTDavid Mercado BNo ratings yet
- Proyecto - 1 Comunicación RS485 Con ArduinoDocument7 pagesProyecto - 1 Comunicación RS485 Con ArduinoHugo Eduardo TorresNo ratings yet
- Reporte 9 PDFDocument3 pagesReporte 9 PDFivan lopezNo ratings yet
- Terminales externos del ESP32 y sus funciones generalesDocument4 pagesTerminales externos del ESP32 y sus funciones generalesFERNANDO RIOS CORTESNo ratings yet
- Arduino RF 433MHzDocument11 pagesArduino RF 433MHzGilmer Vásquez PérezNo ratings yet
- Preparatorio 2.1 Masabanda PachacamaDocument7 pagesPreparatorio 2.1 Masabanda PachacamaAndrés GmctNo ratings yet
- Reporte 9 JDAS 1842579Document5 pagesReporte 9 JDAS 1842579Serna ReynaNo ratings yet
- Tipos de Comunicación ArduinoDocument6 pagesTipos de Comunicación ArduinoEstiven ValenciaNo ratings yet
- Comunicación serial I2C entre ArduinosDocument3 pagesComunicación serial I2C entre ArduinosameliaNo ratings yet
- Comunicacion SerialDocument8 pagesComunicacion SerialCarlos quispe QuispeNo ratings yet
- Comunicación I2C: Protocolo para controlar dispositivos con solo 2 cablesDocument11 pagesComunicación I2C: Protocolo para controlar dispositivos con solo 2 cablesGuillermo MendietaNo ratings yet
- Comunicacion Entre Dos ArduinosDocument18 pagesComunicacion Entre Dos ArduinosJhon FabricioNo ratings yet
- Proyecto de Comunicaciones1Document6 pagesProyecto de Comunicaciones1Alex PintadoNo ratings yet
- Telemetria Analisis y Diseño - Fase2Document20 pagesTelemetria Analisis y Diseño - Fase2Diego GaoNo ratings yet
- Informe - Lab6 - Vatimetro DigitalDocument5 pagesInforme - Lab6 - Vatimetro DigitalKarolNo ratings yet
- OmarDocument8 pagesOmarOmar Navia CondoriNo ratings yet
- Módulo ESP8266 WiFiDocument4 pagesMódulo ESP8266 WiFisergioabelramirezzapNo ratings yet
- Proyecto Final Micro LabDocument4 pagesProyecto Final Micro LabWilber Ramirez LinaresNo ratings yet
- Informe RS 232 RecuperacionDocument11 pagesInforme RS 232 RecuperacionJuanSe Vasquez CrissNo ratings yet
- USB Entre PIC y MatlabDocument27 pagesUSB Entre PIC y MatlabpetroNo ratings yet
- Detector de Voltaje Con BluetoothDocument36 pagesDetector de Voltaje Con BluetoothLuis Ayasta PortocarreroNo ratings yet
- Informe I2c PDFDocument3 pagesInforme I2c PDFFabricio ÑacatoNo ratings yet
- Comunicación Inalámbrica A 2Document4 pagesComunicación Inalámbrica A 2Gustavo Leyva EspezúaNo ratings yet
- Garcia PerezDocument3 pagesGarcia PereznorbertonorbertoNo ratings yet
- Reporte Proyecto Maximiliano Ramiro Andres 7cm6Document13 pagesReporte Proyecto Maximiliano Ramiro Andres 7cm6FEDRA FARCA VILLAVICENCIONo ratings yet
- Sistema de MonitoreoDocument28 pagesSistema de MonitoreoRaul KdnaNo ratings yet
- Informe 7 Labo de Micro2Document16 pagesInforme 7 Labo de Micro2-Pendexxx- 20No ratings yet
- Práctica 3 Sensor UltrasónicoDocument17 pagesPráctica 3 Sensor UltrasónicoRobertoWhiteBlackNo ratings yet
- Protocolos de ComunicaciónDocument5 pagesProtocolos de ComunicaciónDianaAuroraNo ratings yet
- Comunicación Serial TTLDocument7 pagesComunicación Serial TTLMaria AbramonteNo ratings yet
- Controlar Arduino Con Un Mando A Distancia InfrarrojoDocument7 pagesControlar Arduino Con Un Mando A Distancia InfrarrojoCamilo Fonseca SanchezNo ratings yet
- Informe Final Del Laboratorio 5Document6 pagesInforme Final Del Laboratorio 5Ademir IldefonsoNo ratings yet
- Presentación Puerto SerieDocument24 pagesPresentación Puerto SerieluropatNo ratings yet
- Sistema de MonitoreoDocument23 pagesSistema de MonitoreoRaul KdnaNo ratings yet
- Electronica de Potencia Final01Document27 pagesElectronica de Potencia Final01Lsknho KennyNo ratings yet
- Imforme TTLDocument11 pagesImforme TTLAlex Fernado Páez SalasNo ratings yet
- Circuitos de Interconexión Entre Dos Arduinos Con Adaptadores 485 2Document20 pagesCircuitos de Interconexión Entre Dos Arduinos Con Adaptadores 485 2Frank LeonNo ratings yet
- Proyecto de Encriptado Con DsPICDocument5 pagesProyecto de Encriptado Con DsPICAnnie1388No ratings yet
- Comunicación Serial Con Módulos RF y ArduinoDocument8 pagesComunicación Serial Con Módulos RF y ArduinokevinNo ratings yet
- Sensor UltrasónicoDocument9 pagesSensor UltrasónicofaserzoneNo ratings yet
- Uso de Modulo GSM para Control de RelaysDocument21 pagesUso de Modulo GSM para Control de RelaysJuan Luis Jimenez MendozaNo ratings yet
- Lab - 5 - Comunicacion Serial I2C PDFDocument9 pagesLab - 5 - Comunicacion Serial I2C PDFJUAN DIAZ MAMANINo ratings yet
- Comunicacion Serial Proteus CDocument15 pagesComunicacion Serial Proteus CPAOLA PADILLANo ratings yet
- Proyecto CISCODocument17 pagesProyecto CISCOPedro HernandezNo ratings yet
- Previo 09Document7 pagesPrevio 09Jesus Jaime GarciaNo ratings yet
- Proyecto SIA LabDocument4 pagesProyecto SIA LabEduardo SalinasNo ratings yet
- Lab - 04 (Rip-Ospf-Estatico y VLSM)Document10 pagesLab - 04 (Rip-Ospf-Estatico y VLSM)fernandomh2028No ratings yet
- Resumen Ejecutivo Proyecto1Document3 pagesResumen Ejecutivo Proyecto1Juan Jose Ramirez MonsalveNo ratings yet
- Practica 5 RobotDocument11 pagesPractica 5 RobotCarlos DominguezNo ratings yet
- Comunicación inalámbrica RF entre ArduinosDocument16 pagesComunicación inalámbrica RF entre Arduinosankasi rey hhNo ratings yet
- ArduinoDocument7 pagesArduinoCatherinee MooraNo ratings yet
- Paico Saavedra Tatiana Pa3Document7 pagesPaico Saavedra Tatiana Pa3RONALDO RUBEN PAISIG GUEVARANo ratings yet
- Comunicacion Serial PDFDocument21 pagesComunicacion Serial PDFViki AguirreNo ratings yet
- g1 Arduino ResumenDocument8 pagesg1 Arduino ResumenAxel Levise VilcaNo ratings yet
- WindowsDocument1 pageWindowsZeus OmegaNo ratings yet
- Los 6 Elementos Del LenguajeDocument4 pagesLos 6 Elementos Del LenguajeZeus OmegaNo ratings yet
- 4 Cucharadas Al Día y El CÁNCER DesapareceDocument14 pages4 Cucharadas Al Día y El CÁNCER DesapareceZeus OmegaNo ratings yet
- Ejemplos de DinámicaDocument11 pagesEjemplos de DinámicaZeus OmegaNo ratings yet
- 01 Arranque Directo ModelDocument1 page01 Arranque Directo ModelZeus OmegaNo ratings yet
- Problemas de Asignación - Ingeniería IndustrialDocument9 pagesProblemas de Asignación - Ingeniería IndustrialZeus OmegaNo ratings yet
- 06 03 Arranque-Directo Con-PilotoDocument1 page06 03 Arranque-Directo Con-PilotoZeus OmegaNo ratings yet
- Los 6 Elementos Del LenguajeDocument4 pagesLos 6 Elementos Del LenguajeZeus OmegaNo ratings yet
- 02 Arranque Directo de Un Motor Activado Por Sensor Fotoelectrico ModelDocument1 page02 Arranque Directo de Un Motor Activado Por Sensor Fotoelectrico ModelZeus OmegaNo ratings yet
- Troco LaDocument10 pagesTroco LaAnonymous L7sGDm9lLNo ratings yet
- Segundo Informe Del Proyecto de Redes IndustrialesDocument22 pagesSegundo Informe Del Proyecto de Redes IndustrialesZeus OmegaNo ratings yet
- InstalacionAndroidDocument5 pagesInstalacionAndroidZeus OmegaNo ratings yet
- Tercer Informe de LaboratorioDocument12 pagesTercer Informe de LaboratorioZeus OmegaNo ratings yet
- Primer Informe Del Proyecto de Redes IndustrialesDocument19 pagesPrimer Informe Del Proyecto de Redes IndustrialesZeus OmegaNo ratings yet
- Ley de La Conservación de La Energia Aplicada A Una Masa de Control, Volumen de ControlDocument37 pagesLey de La Conservación de La Energia Aplicada A Una Masa de Control, Volumen de ControlZeus Omega100% (1)
- 2.1-Redes de Area LocalDocument12 pages2.1-Redes de Area LocalZeus OmegaNo ratings yet
- Relaciones de EnergíasDocument3 pagesRelaciones de EnergíasZeus OmegaNo ratings yet
- Proyecto Redes IndustrialesDocument17 pagesProyecto Redes IndustrialesZeus OmegaNo ratings yet
- Algoritmos 50 EjemplosDocument37 pagesAlgoritmos 50 Ejemplosjaeo0078No ratings yet
- Ejercicios de Algoritmos y Diagrarmas de Flujo ResueltosDocument21 pagesEjercicios de Algoritmos y Diagrarmas de Flujo Resueltosposdeley75% (8)
- Cálculos para Equipos en CampoDocument3 pagesCálculos para Equipos en CampoZeus OmegaNo ratings yet
- Tutorial Kali Linux PDFDocument79 pagesTutorial Kali Linux PDFEdwin PiRoNo ratings yet
- Señal DiscretaDocument12 pagesSeñal DiscretaZeus OmegaNo ratings yet
- Diseño y Control de Un Robot ParaleloDocument7 pagesDiseño y Control de Un Robot ParaleloZeus OmegaNo ratings yet
- Primer Informe de LaboratorioDocument12 pagesPrimer Informe de LaboratorioZeus OmegaNo ratings yet
- SensóricaDocument27 pagesSensóricaZeus OmegaNo ratings yet
- 008B Protocolos Comunicacion Industrial Basado Ethernet LabviewDocument51 pages008B Protocolos Comunicacion Industrial Basado Ethernet LabviewEdgar Maya PerezNo ratings yet
- Accesorios de La Tubería de RevestimientoDocument15 pagesAccesorios de La Tubería de Revestimientojohnrofa100% (1)
- Examen C4Document8 pagesExamen C4VANESSA RENDON100% (1)
- Tren ElectromagneticoDocument12 pagesTren ElectromagneticoSnakeeMxNo ratings yet
- Para Implementar Las Buenas Prácticas Agrícolas en La Producción de PlátanoDocument2 pagesPara Implementar Las Buenas Prácticas Agrícolas en La Producción de PlátanoWilmer Peña Aguirre100% (1)
- Proceso devolución FalabellaDocument4 pagesProceso devolución FalabellaPasión TenisNo ratings yet
- Taller 1 Estadistica Descriptiva 2Document6 pagesTaller 1 Estadistica Descriptiva 2Chamorro Sigdman FabianNo ratings yet
- Elementos de La Tabla Periódica UsosDocument12 pagesElementos de La Tabla Periódica UsosOmar JimenezNo ratings yet
- Manual Gestión NECDocument33 pagesManual Gestión NECyorkaef57100% (1)
- Da Proceso 09-1-48403 118004002 1370292 PDFDocument5 pagesDa Proceso 09-1-48403 118004002 1370292 PDFViVii G. LópezNo ratings yet
- Introducción Sobre FotoelectricidadDocument7 pagesIntroducción Sobre FotoelectricidadJuan LojaNo ratings yet
- Ojos AnimatrónicosDocument3 pagesOjos AnimatrónicosRodrigo CoriaNo ratings yet
- BBD Br010014ce3Document116 pagesBBD Br010014ce3Daniel Alex SánchezNo ratings yet
- Dinámica de un automóvil: frenadoDocument26 pagesDinámica de un automóvil: frenadoFANNY PUMANo ratings yet
- Calculo Lagtime CompletoDocument10 pagesCalculo Lagtime CompletoFranklin AlmeraNo ratings yet
- Informacion Ingles 1 PDFDocument15 pagesInformacion Ingles 1 PDFJose Tomas Vergara DiazNo ratings yet
- Responsabilidades y funciones de supervisión de KarenDocument3 pagesResponsabilidades y funciones de supervisión de KarenRolando SanchezNo ratings yet
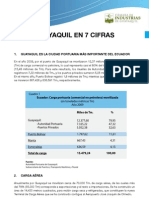
- Guayaquil en CifrasDocument3 pagesGuayaquil en CifrasKevin HerreraNo ratings yet
- Filosofos de La CalidadDocument7 pagesFilosofos de La CalidadBecker96100% (1)
- Tabla de RendimientosDocument26 pagesTabla de RendimientosJesús Valladares RosalesNo ratings yet
- Hombre lobo travesías flipbook 20 páginasDocument20 pagesHombre lobo travesías flipbook 20 páginasMónica Valencia MoralesNo ratings yet
- Cuantización y Codificación de Una SeñalDocument4 pagesCuantización y Codificación de Una SeñalWilson PalomoNo ratings yet
- ModeloDocument1 pageModeloAngie Paola Hernandez VargasNo ratings yet
- TAREA-Caso Practico 1 Ingeniería Ambiental Legislacion A EnviadoDocument2 pagesTAREA-Caso Practico 1 Ingeniería Ambiental Legislacion A EnviadoJulissa FeijooNo ratings yet
- TRABAJOFINAL TR1 Calidad Total)Document7 pagesTRABAJOFINAL TR1 Calidad Total)Renan DroidNo ratings yet
- Actividad 03 EntregableDocument2 pagesActividad 03 EntregableAnonymous cLDfM2fm5XNo ratings yet
- Resumen de Procesos Norma ISO 20000Document4 pagesResumen de Procesos Norma ISO 20000Viktor Zamora100% (1)
- Efectos de La Pérdida y La Fragmentación Del Hábitat Sobre La Conservación Del Endemismo Linaria Nigricans (COMUNICACIÓN)Document23 pagesEfectos de La Pérdida y La Fragmentación Del Hábitat Sobre La Conservación Del Endemismo Linaria Nigricans (COMUNICACIÓN)Blas M. BenitoNo ratings yet
- Mambocaure - Informe FinalDocument162 pagesMambocaure - Informe FinalCarlos Abrego Suárez100% (1)
- TEST General ClaseB-2015Document55 pagesTEST General ClaseB-2015andres carpio0% (1)