You might also like
- Literature Review of BLDCDocument6 pagesLiterature Review of BLDCsushil63666No ratings yet
- A Survey and Comparison of Characteristics of Motor Drives Used in Electric VehiclesDocument4 pagesA Survey and Comparison of Characteristics of Motor Drives Used in Electric VehiclesGabriel de SáNo ratings yet
- Unit-V Electric DrivesDocument24 pagesUnit-V Electric DrivesVIKASH MALIKNo ratings yet
- Comparative Theoretical Study of BLDC AnDocument4 pagesComparative Theoretical Study of BLDC Anmanoish07No ratings yet
- EV Component SelectionDocument8 pagesEV Component SelectionLalla ShuklaNo ratings yet
- Motores de Imánes Permanentes y de InductanciaDocument5 pagesMotores de Imánes Permanentes y de InductanciaFreddy Julián Chipugsi CaleroNo ratings yet
- Assessment of BLDC Motor For EV Application Considering Vehicle Design StrategyDocument7 pagesAssessment of BLDC Motor For EV Application Considering Vehicle Design StrategyPremier PublishersNo ratings yet
- ISNEE Case Study 3 - Selection of Motor and Battery (Nanditta)Document10 pagesISNEE Case Study 3 - Selection of Motor and Battery (Nanditta)akansh malhotraNo ratings yet
- Electric Motor Cycle and ScooterDocument9 pagesElectric Motor Cycle and ScooterA A.DevanandhNo ratings yet
- Hapter Ntroduction: Department of Electrical Engineering, Sgsits IndoreDocument61 pagesHapter Ntroduction: Department of Electrical Engineering, Sgsits Indoreshashank barsainyaNo ratings yet
- Regenerative Braking System of Electric Vehicle Driven by Brushless DC MotorDocument12 pagesRegenerative Braking System of Electric Vehicle Driven by Brushless DC Motorpr aghNo ratings yet
- Design of Axial Flux Permanent Magnet Brushless DC Motor For Direct Drive of Electric VehicleDocument6 pagesDesign of Axial Flux Permanent Magnet Brushless DC Motor For Direct Drive of Electric Vehiclegrun.jpgNo ratings yet
- THE FULL PAPER by DR Sab Safi of SDT Drives PDFDocument10 pagesTHE FULL PAPER by DR Sab Safi of SDT Drives PDFmohanNo ratings yet
- Car Examples ComparisonDocument14 pagesCar Examples ComparisonNigamanand RaoNo ratings yet
- Microcontrolled Electromagnetic Engine: Atul Kumar Singh, Prabhat Ranjan TripathiDocument4 pagesMicrocontrolled Electromagnetic Engine: Atul Kumar Singh, Prabhat Ranjan TripathiTarun SinghNo ratings yet
- Energy Efficient Appliances in A Residential Building - IEEE - SGBC2016 - ConfDocument6 pagesEnergy Efficient Appliances in A Residential Building - IEEE - SGBC2016 - ConfkannanNo ratings yet
- Hybrid Energy Storage System For Electric Vehicle: Helix Vol. 9 (6) : 5801-5805 DOI 10.29042/2019-5801-5805Document5 pagesHybrid Energy Storage System For Electric Vehicle: Helix Vol. 9 (6) : 5801-5805 DOI 10.29042/2019-5801-5805AswinNo ratings yet
- Electric Motor Control: DC, AC, and BLDC MotorsFrom EverandElectric Motor Control: DC, AC, and BLDC MotorsRating: 4.5 out of 5 stars4.5/5 (19)
- 12th Evaluation Ahmed Samy 17105552Document14 pages12th Evaluation Ahmed Samy 17105552Ahmed Samy El GoharyNo ratings yet
- Evaluation_of_Regenerative_Braking_and_its_Functionality_in_Electric_VehiclesDocument6 pagesEvaluation_of_Regenerative_Braking_and_its_Functionality_in_Electric_VehiclesDEBARATI DAMNo ratings yet
- E3sconf SeFet2019 01029Document6 pagesE3sconf SeFet2019 01029DONE AND DUSTEDNo ratings yet
- Jeas 1012 796Document8 pagesJeas 1012 796Victor FurmanNo ratings yet
- Energies 12 04615 v2Document19 pagesEnergies 12 04615 v2wgjsesotxjxzosyxjpNo ratings yet
- IEEE - Design and Construction of Electric MinibusDocument6 pagesIEEE - Design and Construction of Electric MinibusAhmet Apak100% (1)
- BLDC 1Document9 pagesBLDC 1vishiwizardNo ratings yet
- Speed Control of Brushless DC Motor Using Zeta ConverterDocument7 pagesSpeed Control of Brushless DC Motor Using Zeta ConverterRicard Alfredo PurbaNo ratings yet
- Experimental Verification of Regenerative Braking Characteristics by Applying Different Motor Armature VoltageDocument4 pagesExperimental Verification of Regenerative Braking Characteristics by Applying Different Motor Armature VoltagekpenteyssNo ratings yet
- Karthik 2019Document8 pagesKarthik 2019David EspinozaNo ratings yet
- 13 EbikeDocument7 pages13 EbikeVignesh SenthilNo ratings yet
- Energy Efficiency of Electric Vehicles PDFDocument43 pagesEnergy Efficiency of Electric Vehicles PDFMahesh GyawaliNo ratings yet
- Control of BLDC Motor and Regenerative Braking in Electric VehicleDocument6 pagesControl of BLDC Motor and Regenerative Braking in Electric VehicleIJRASETPublicationsNo ratings yet
- Power Generation Through Speed BreakersDocument22 pagesPower Generation Through Speed BreakersSaikumar MysaNo ratings yet
- Final Year PapDocument8 pagesFinal Year PapSanioSunojNo ratings yet
- EV Motors & DriversDocument10 pagesEV Motors & DriversSasindu GayanthaNo ratings yet
- Ete ReportDocument5 pagesEte Reportpushpaktighare36No ratings yet
- DrivingCharging Integrated Controller For Electric VehiclesDocument19 pagesDrivingCharging Integrated Controller For Electric VehiclesDEBARATI DAMNo ratings yet
- ElectricscooterDocument4 pagesElectricscooterSurya AnjuNo ratings yet
- 111 Study NCDocument8 pages111 Study NCARUN VNo ratings yet
- Design, Implementation and Speed Estimation of Three Phase 2 KW Out Runner Permanent Magnet BLDC MotorDocument14 pagesDesign, Implementation and Speed Estimation of Three Phase 2 KW Out Runner Permanent Magnet BLDC MotorDavid AzadNo ratings yet
- Chapter 5Document7 pagesChapter 5surendraNo ratings yet
- Regenerative Hybrid Automobile ReportDocument67 pagesRegenerative Hybrid Automobile ReportRajat KapoorNo ratings yet
- Term Paper On DC MotorDocument4 pagesTerm Paper On DC Motorc5qfb5v5100% (1)
- Question Bank: Sai Ram Engineering College, Chennai 600 044 An NBA Accredited & ISO 9001:2015 Certified InstitutionDocument55 pagesQuestion Bank: Sai Ram Engineering College, Chennai 600 044 An NBA Accredited & ISO 9001:2015 Certified InstitutionkalyanNo ratings yet
- AReviewof Motorsfor Electric VehiclesDocument4 pagesAReviewof Motorsfor Electric Vehiclesoxygeneelcsevs OxygeneElectronicsNo ratings yet
- Regenerative Braking Systemof Electric Vehicle Drivenby Brushless DCMotorDocument12 pagesRegenerative Braking Systemof Electric Vehicle Drivenby Brushless DCMotorMinh VõNo ratings yet
- Design and Development of Controller for Electric VehicleDocument4 pagesDesign and Development of Controller for Electric VehicleInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Electrical Motors For Electric Vehicle An OverviewDocument7 pagesElectrical Motors For Electric Vehicle An OverviewFarhodjon AbdusamatovNo ratings yet
- C1201042329 PDFDocument7 pagesC1201042329 PDFJOHN MINKHANTNo ratings yet
- Modeling and Simulation of Three Phase Induction Machine Using Written Pole TechnologyDocument7 pagesModeling and Simulation of Three Phase Induction Machine Using Written Pole TechnologyJOHN MINKHANTNo ratings yet
- Energy Efficient Appliances in A Residential BuildingDocument1 pageEnergy Efficient Appliances in A Residential BuildingkannanNo ratings yet
- InTech-Energy Efficiency of Electric Vehicles1Document43 pagesInTech-Energy Efficiency of Electric Vehicles1KaleemNo ratings yet
- Hybrid Vehicle ReportDocument17 pagesHybrid Vehicle ReportMidhun S Jacob100% (1)
- Egenerative Shock Absorber For Hybrid Cars: C. M. Pramodh, S. R. ShankapalDocument8 pagesEgenerative Shock Absorber For Hybrid Cars: C. M. Pramodh, S. R. ShankapalArun GargNo ratings yet
- IntershipDocument14 pagesIntershipshahid abdulNo ratings yet
- Multiobjective Optimization of Axial Flux PMBLDC Motor PDFDocument20 pagesMultiobjective Optimization of Axial Flux PMBLDC Motor PDFTejas PanchalNo ratings yet
- Eeguc Unit IDocument28 pagesEeguc Unit IParventhan KannanNo ratings yet
- Tri-Port Converter For Flexible Energy Control of PV-fed Electric VehiclesDocument8 pagesTri-Port Converter For Flexible Energy Control of PV-fed Electric VehiclesSureshNo ratings yet
- Energies 14 03622Document19 pagesEnergies 14 03622Quang Thuận NguyễnNo ratings yet
- SynopsisDocument11 pagesSynopsissunil kumarNo ratings yet
- GST Digest covers latest updates on GSTDocument39 pagesGST Digest covers latest updates on GSTKapish SharmaNo ratings yet
- GST Guide For Students - Making GST - Good & Simple Tax PDFDocument118 pagesGST Guide For Students - Making GST - Good & Simple Tax PDFSapna MalikNo ratings yet
- SL No Circle Sap ID Site Name StateDocument6 pagesSL No Circle Sap ID Site Name StateKapish SharmaNo ratings yet
- User ManualDocument53 pagesUser ManualKapish SharmaNo ratings yet
- Existing: Duration: 3 Hrs. Marks: 70 Lectures: 65 ObjectiveDocument5 pagesExisting: Duration: 3 Hrs. Marks: 70 Lectures: 65 ObjectiveKapish SharmaNo ratings yet
- AbooksDocument9 pagesAbooksKapish SharmaNo ratings yet
- P McGowan Daily and Weekly Checks V1Document49 pagesP McGowan Daily and Weekly Checks V1Kapish SharmaNo ratings yet
- GST E Book PDFDocument63 pagesGST E Book PDFnaveen chaudharyNo ratings yet
- SSC Mathematics English VesionDocument309 pagesSSC Mathematics English Vesionলাজ মাহমুদ0% (1)
- Limestone LCI October 2008Document28 pagesLimestone LCI October 2008bar_gilNo ratings yet
- Sub: Quotation For ScrapDocument1 pageSub: Quotation For ScrapKapish SharmaNo ratings yet
- 1 Floor, Orion Tower, Christian Basti, G.S.ROAD, GUWAHATI - 781005Document1 page1 Floor, Orion Tower, Christian Basti, G.S.ROAD, GUWAHATI - 781005Kapish SharmaNo ratings yet
- S S Target Vs Achv Dec 14 - NESADocument2 pagesS S Target Vs Achv Dec 14 - NESAKapish SharmaNo ratings yet
- Re ProDocument140 pagesRe Properu1975No ratings yet
- ARMY TAOfficer Nov12Document2 pagesARMY TAOfficer Nov12nareshjangra397No ratings yet
- December Secondary Sales 2014Document42 pagesDecember Secondary Sales 2014Kapish SharmaNo ratings yet
- HP1005UGDocument144 pagesHP1005UGKamal JoshiNo ratings yet
- Nesa - Secondary - Rep (January - 2015) SoDocument57 pagesNesa - Secondary - Rep (January - 2015) SoKapish SharmaNo ratings yet
- KasDocument1 pageKasKapish SharmaNo ratings yet
- My Important LinkDocument1 pageMy Important LinkKapish SharmaNo ratings yet
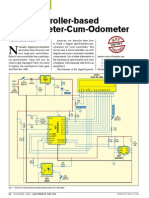
- Speedometer Cum OdometerDocument5 pagesSpeedometer Cum OdometerShashank ShekharNo ratings yet
- Saha Bhaskar C.VDocument3 pagesSaha Bhaskar C.VKapish SharmaNo ratings yet
- 5.CH-2 Project ManagementDocument9 pages5.CH-2 Project ManagementKapish SharmaNo ratings yet
- Cost Annalysis of Optional Work (For 3 Rooms) Items Rates P/SF AreaDocument4 pagesCost Annalysis of Optional Work (For 3 Rooms) Items Rates P/SF AreaKapish SharmaNo ratings yet
- Battery AutoDocument5 pagesBattery AutoKapish SharmaNo ratings yet
- Battery Rickshaw Dealership Agreement SummaryDocument3 pagesBattery Rickshaw Dealership Agreement SummaryKapish SharmaNo ratings yet
- Assam Public Service Commission: Journal Entry Confirmation DetailsDocument1 pageAssam Public Service Commission: Journal Entry Confirmation DetailsKapish SharmaNo ratings yet
- Spare PartsDocument46 pagesSpare PartsKapish SharmaNo ratings yet
- Cls17 DMD ForcstdDocument32 pagesCls17 DMD ForcstdKapish SharmaNo ratings yet
- 3rd Monthly ExamDocument4 pages3rd Monthly ExamRoselyn PinionNo ratings yet
- Architecture Literature Review SampleDocument7 pagesArchitecture Literature Review Samplec5pnw26s100% (1)
- Psychiatric Mental Health Nursing CH 1Document23 pagesPsychiatric Mental Health Nursing CH 1sara75% (4)
- Class X-BookDocument16 pagesClass X-BookPratyakshNo ratings yet
- pr1-module-week-5-6-i-what-is-a-research-title1-1-the-most-important-element-that-defines-theDocument28 pagespr1-module-week-5-6-i-what-is-a-research-title1-1-the-most-important-element-that-defines-theJerelyn MalacasteNo ratings yet
- Unit 1 Vocab. ReadingDocument4 pagesUnit 1 Vocab. ReadingNhật KiênNo ratings yet
- Carl Dahlhaus, "What Is A Fact of Music History "Document10 pagesCarl Dahlhaus, "What Is A Fact of Music History "sashaNo ratings yet
- Job Description: Preferably An MBA/PGDBM in HRDocument2 pagesJob Description: Preferably An MBA/PGDBM in HRsaarika_saini1017No ratings yet
- BEEF Scholars Merit List Selected On The Basis of 1st Semester GPA of Course Work, Enrolled in BUITEMS QTADocument6 pagesBEEF Scholars Merit List Selected On The Basis of 1st Semester GPA of Course Work, Enrolled in BUITEMS QTAKhan QuettaNo ratings yet
- Lucena Sec032017 Filipino PDFDocument19 pagesLucena Sec032017 Filipino PDFPhilBoardResultsNo ratings yet
- Training Course Information Form: Arab Academy For Science, Technology and Maritime Transport Port Training InstituteDocument2 pagesTraining Course Information Form: Arab Academy For Science, Technology and Maritime Transport Port Training Instituteخيري محمدNo ratings yet
- Deductive ReasoningDocument2 pagesDeductive ReasoningLorenzo B. FollosoNo ratings yet
- Night Shifts Can Also Be TiringDocument2 pagesNight Shifts Can Also Be TiringMariccon Celestial PalmaNo ratings yet
- Iitm - MDocument1 pageIitm - Msachin pathakNo ratings yet
- MoralvirtueDocument1 pageMoralvirtueShaila IvoryNo ratings yet
- Childhood Trauma Questionnaire ScoringDocument2 pagesChildhood Trauma Questionnaire Scoringwoongie yeoNo ratings yet
- Chapter 1-5 Teacher-Attributes (Full Research)Document26 pagesChapter 1-5 Teacher-Attributes (Full Research)Honeyvel Marasigan BalmesNo ratings yet
- Newsletter 3.1Document12 pagesNewsletter 3.1mrifenburgNo ratings yet
- Global Network - Torishima-EnglishDocument10 pagesGlobal Network - Torishima-Englishmayakanon4198No ratings yet
- Intrusion Detection System Using Unsupervised ML Algorithms: School of Information Technology and EngineeringDocument15 pagesIntrusion Detection System Using Unsupervised ML Algorithms: School of Information Technology and Engineeringhaggele haggeleNo ratings yet
- Understanding the challenges and opportunities of artificial intelligenceDocument6 pagesUnderstanding the challenges and opportunities of artificial intelligenceHương DươngNo ratings yet
- M1-Lesson 1 Part 2 Context Clue Week 2Document26 pagesM1-Lesson 1 Part 2 Context Clue Week 2Jeneros PartosNo ratings yet
- Sgs Cbe Academy Sri Lanka Training Prospectus 2021 enDocument10 pagesSgs Cbe Academy Sri Lanka Training Prospectus 2021 enKaisigmazen Quality QwestNo ratings yet
- Enhancing and Practicing Executive Function Skills With Children From Infancy To Adolescence 1 PDFDocument17 pagesEnhancing and Practicing Executive Function Skills With Children From Infancy To Adolescence 1 PDFAnonymous M6SqPLDpA100% (2)
- First Quarter Exam in Reading and Writing SkillsDocument3 pagesFirst Quarter Exam in Reading and Writing SkillsCamille Wu50% (4)
- Research 2: First Quarter - Week 5 and 6Document20 pagesResearch 2: First Quarter - Week 5 and 6Rutchel100% (2)
- Agenda Setting Syllabus 2010Document2 pagesAgenda Setting Syllabus 2010Arta Novita HarlanNo ratings yet
- WQuest Itools 2 Tests 5Document1 pageWQuest Itools 2 Tests 5Magdalena QuirogaNo ratings yet
- Unit Summary: Superheroes Making A DifferenceDocument2 pagesUnit Summary: Superheroes Making A DifferenceIvan ICNo ratings yet
- FEDERAL PUBLIC SERVICE COMMISSION SCREENING/PROFESSIONAL TESTSDocument36 pagesFEDERAL PUBLIC SERVICE COMMISSION SCREENING/PROFESSIONAL TESTSCh Hassan TajNo ratings yet