You might also like
- Apuntes de Estructuras Metálicas - ConstruaprendeDocument94 pagesApuntes de Estructuras Metálicas - ConstruaprendeAlberto PaezNo ratings yet
- Porticos RESOLUCIONDocument12 pagesPorticos RESOLUCIONSinchi Roger Bedoya Magne0% (1)
- New Adults2 Guía AlumnoDocument44 pagesNew Adults2 Guía Alumnoz1m_1nvaderNo ratings yet
- Datos Tecnicos Perfiles de Acero MaplocaDocument75 pagesDatos Tecnicos Perfiles de Acero MaplocaMasssaiNo ratings yet
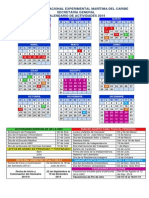
- Calendario 2014-5Document1 pageCalendario 2014-5Jose Angel Orozco GarciaNo ratings yet
- Capitan de Yate Gobierno VascoDocument575 pagesCapitan de Yate Gobierno Vascoteteluis100% (1)
- BalizamientoDocument4 pagesBalizamientoJose Angel Orozco GarciaNo ratings yet
- FormularioDocument1 pageFormularioJose Angel Orozco GarciaNo ratings yet
- Descarga de Residuos PDFDocument20 pagesDescarga de Residuos PDFJose Angel Orozco GarciaNo ratings yet
- Curva de Transición La Clotoide - Walterio González BarraDocument32 pagesCurva de Transición La Clotoide - Walterio González BarraCaig Usach94% (18)
- ApuntesDocument30 pagesApuntesJose Angel Orozco GarciaNo ratings yet
- Espiral de Euler en CallesDocument30 pagesEspiral de Euler en CallesGiuseppeNapolitanoNo ratings yet
- Palale Indes DibujoDocument6 pagesPalale Indes DibujoJose Angel Orozco GarciaNo ratings yet
- Curvas de transición en carreterasDocument67 pagesCurvas de transición en carreterasJose Angel Orozco Garcia100% (1)
- A. Buque Tanque ICARODocument1 pageA. Buque Tanque ICAROJose Angel Orozco GarciaNo ratings yet
- Vigas Isostáticas - SolucionesDocument49 pagesVigas Isostáticas - SolucionesajhordanNo ratings yet
- Determinación del contenido de humedadDocument2 pagesDeterminación del contenido de humedadexodhoNo ratings yet
- Aexamen 2Document20 pagesAexamen 2Jose Angel Orozco GarciaNo ratings yet
- MedidaDocument56 pagesMedidaapi-3831453100% (1)
- Fuerza Cortante y Momento FlectorDocument4 pagesFuerza Cortante y Momento FlectorEmily Gabriela Fuentes Marca100% (1)
- Convergencia SucesionesDocument47 pagesConvergencia SucesionesRafael CárdenasNo ratings yet
- La Materia 3 EsoDocument14 pagesLa Materia 3 EsoJose Angel Orozco GarciaNo ratings yet
- Nuevo Documento de Microsoft WordDocument1 pageNuevo Documento de Microsoft WordklaudipoNo ratings yet
- Nuevo Documento de Microsoft WordDocument1 pageNuevo Documento de Microsoft WordklaudipoNo ratings yet
- Balanceo de Reacciones QuimicasDocument32 pagesBalanceo de Reacciones QuimicasAndres Flores100% (1)
- Disol 011Document1 pageDisol 011Jose Angel Orozco GarciaNo ratings yet
- Disol 011Document1 pageDisol 011Jose Angel Orozco GarciaNo ratings yet
- Disol 012Document1 pageDisol 012Jose Angel Orozco GarciaNo ratings yet
- Curso Estructura Funcion Sistema Electrico Retroexcavadora wb146 5 Komatsu PDFDocument25 pagesCurso Estructura Funcion Sistema Electrico Retroexcavadora wb146 5 Komatsu PDFAlonso Flores Cary100% (3)
- Exel Nissan CVT 7Document87 pagesExel Nissan CVT 7romeo_mecNo ratings yet
- Mapa Conceptual Josue Ramirez Bernabe.Document1 pageMapa Conceptual Josue Ramirez Bernabe.Josue Ramirez BernabeNo ratings yet
- Garcia Frias Isidro Gabriel 1DDocument11 pagesGarcia Frias Isidro Gabriel 1DManuel Gael Camara NacerNo ratings yet
- Movimiento rectilíneo uniformemente acelerado (MRUADocument11 pagesMovimiento rectilíneo uniformemente acelerado (MRUAAldair Ü CalderónNo ratings yet
- Evaluación Física Grupo II 2016Document6 pagesEvaluación Física Grupo II 2016Ômar Vega CNo ratings yet
- Tema 4 Cinematica DirectaDocument27 pagesTema 4 Cinematica DirectaJoseEduardoBautistaAcevedo0% (1)
- Aceleracion de Coriolis 2do2014Document10 pagesAceleracion de Coriolis 2do2014Julio César Matute CorderoNo ratings yet
- Cuadern0 Trabajo Fisica IDocument26 pagesCuadern0 Trabajo Fisica IJeanNo ratings yet
- Semana 8A Mov Parabolico Fisica 1 RDocument4 pagesSemana 8A Mov Parabolico Fisica 1 REdwin RJ BarriosNo ratings yet
- Taller de Mecánica de FluidosDocument3 pagesTaller de Mecánica de FluidosJeisson OrtegónNo ratings yet
- s5 Leyes Del Movimiento de NewtonDocument2 pagess5 Leyes Del Movimiento de NewtonJose NuñezNo ratings yet
- Tema 19 Elementos de Maquinas y Sistemas - IIDocument4 pagesTema 19 Elementos de Maquinas y Sistemas - IIurko78No ratings yet
- Problemas de MovimientosDocument5 pagesProblemas de MovimientosInés Porrero MoraNo ratings yet
- Calculo de Momentos Metodo de Cross - ProgramaDocument64 pagesCalculo de Momentos Metodo de Cross - ProgramaKath Laurente FloresNo ratings yet
- Calculo y Dibujo de EngranesDocument16 pagesCalculo y Dibujo de EngranesOmar Saul92% (66)
- Clase 3Document15 pagesClase 3AlanNo ratings yet
- TEMA 4 Herramientas Matemáticas para La Localización Ejercicios Solució - OCW - Revision1Document29 pagesTEMA 4 Herramientas Matemáticas para La Localización Ejercicios Solució - OCW - Revision1KevinRamsesBetancourtNo ratings yet
- Movimiento Rectilíneo UniformeDocument9 pagesMovimiento Rectilíneo Uniformeehimy alexandraNo ratings yet
- Robotica Clase10 PDFDocument24 pagesRobotica Clase10 PDFAlvaro MamaniNo ratings yet
- Ejercicios-De-Fisica UncDocument6 pagesEjercicios-De-Fisica UncFrann Jhamil Lara MelgarNo ratings yet
- Ejercicios de Trabajo Virtual PDFDocument21 pagesEjercicios de Trabajo Virtual PDFStanly CANo ratings yet
- Introducción a la física mecánica: conceptos básicosDocument10 pagesIntroducción a la física mecánica: conceptos básicoscarlosNo ratings yet
- FC 08 - Cinemática IIDocument12 pagesFC 08 - Cinemática IINicol VillagraNo ratings yet
- Ejercicios Cinematica - MovParabolicoDocument3 pagesEjercicios Cinematica - MovParabolicoMissiologo Peru100% (1)
- CotizacionDocument45 pagesCotizacionFer Jimenez FigueroaNo ratings yet
- Análisis Cinemático de Mecanismos de 4 EslabonesDocument11 pagesAnálisis Cinemático de Mecanismos de 4 EslabonesSerafin Torres DelgadoNo ratings yet
- Pendulo BalisticoDocument9 pagesPendulo BalisticoMay CordNo ratings yet
- Informe Disco de MaxwellDocument17 pagesInforme Disco de MaxwellJesusNo ratings yet