You might also like
- Algorithm 2 e LatexDocument49 pagesAlgorithm 2 e LatexSAN JUAN BAUTISTANo ratings yet
- Snrs 1 PDFDocument26 pagesSnrs 1 PDFDanilo Jose SemprunNo ratings yet
- Pneumatic SymbolsDocument23 pagesPneumatic SymbolsPirate_KillerNo ratings yet
- Sensor Basics 2Document27 pagesSensor Basics 2SAN JUAN BAUTISTANo ratings yet
- DC motor dynamic modeling and control techniquesDocument23 pagesDC motor dynamic modeling and control techniquesKaderNo ratings yet
- Low Power Walk Improves Robot GaitDocument7 pagesLow Power Walk Improves Robot GaitBranko MiloradovicNo ratings yet
- Motion Planning With PR MsDocument173 pagesMotion Planning With PR MsSAN JUAN BAUTISTANo ratings yet
- CS 326 A: Motion PlanningDocument47 pagesCS 326 A: Motion PlanningSAN JUAN BAUTISTANo ratings yet
- Motion Planning Closed Chain MechanismsDocument170 pagesMotion Planning Closed Chain MechanismsSAN JUAN BAUTISTANo ratings yet
- Adaptive Control: Course OverviewDocument12 pagesAdaptive Control: Course OverviewSAN JUAN BAUTISTANo ratings yet
- DC MotorDocument17 pagesDC MotorBijoy AyyagariNo ratings yet
- Contact MechanicsDocument462 pagesContact MechanicsAshok SiddarthNo ratings yet
- Sliding Mode: Basic Theory and New Perspectives: Dept of Electrical and Electronic EngDocument54 pagesSliding Mode: Basic Theory and New Perspectives: Dept of Electrical and Electronic EngtuanktvNo ratings yet
- Sliding Mode Control ExplainedDocument14 pagesSliding Mode Control ExplainedAsghar AliNo ratings yet
- 16-Sliding Mode ControlDocument9 pages16-Sliding Mode ControlMehvish AnwarNo ratings yet
- Sliding Mode ControlDocument8 pagesSliding Mode ControlVamshidhar Reddy YallaNo ratings yet
- Sliding Mode Control ExplainedDocument14 pagesSliding Mode Control ExplainedAsghar AliNo ratings yet
- Alexandr Mikhailovich Liapunov, The General Problem of The Stability of Motion (1892)Document17 pagesAlexandr Mikhailovich Liapunov, The General Problem of The Stability of Motion (1892)SAN JUAN BAUTISTANo ratings yet
- Some Fundamentals of Stability Theory: Aaron GreenfieldDocument39 pagesSome Fundamentals of Stability Theory: Aaron GreenfieldSAN JUAN BAUTISTANo ratings yet
- Adaptive Control of Mechanical ManipulatorsDocument6 pagesAdaptive Control of Mechanical ManipulatorsSAN JUAN BAUTISTANo ratings yet
- Robot Manual Peter CorkeDocument101 pagesRobot Manual Peter Corkeingenioso23No ratings yet
- Adaptive Control of Mechanical ManipulatorsDocument6 pagesAdaptive Control of Mechanical ManipulatorsSAN JUAN BAUTISTANo ratings yet
- Robot Manual Peter CorkeDocument101 pagesRobot Manual Peter Corkeingenioso23No ratings yet
- Alexandr Mikhailovich Liapunov, The General Problem of The Stability of Motion (1892)Document17 pagesAlexandr Mikhailovich Liapunov, The General Problem of The Stability of Motion (1892)SAN JUAN BAUTISTANo ratings yet
- Some Fundamentals of Stability Theory: Aaron GreenfieldDocument39 pagesSome Fundamentals of Stability Theory: Aaron GreenfieldSAN JUAN BAUTISTANo ratings yet
- Carnegie Mellon Thesis on Dynamics and Control of Underactuated ManipulatorsDocument148 pagesCarnegie Mellon Thesis on Dynamics and Control of Underactuated ManipulatorsSAN JUAN BAUTISTANo ratings yet
- Alexandr Mikhailovich Liapunov, The General Problem of The Stability of Motion (1892)Document17 pagesAlexandr Mikhailovich Liapunov, The General Problem of The Stability of Motion (1892)SAN JUAN BAUTISTANo ratings yet
- Technical specifications for JR3 multi-axis force-torque sensor modelsDocument1 pageTechnical specifications for JR3 multi-axis force-torque sensor modelsSAN JUAN BAUTISTANo ratings yet
- Matlab SignalDocument48 pagesMatlab SignalPanagiotis Giannoulis50% (2)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Pressure-Grouted Soil Nails Improve Weathered Slope StabilityDocument11 pagesPressure-Grouted Soil Nails Improve Weathered Slope StabilityFrans van der MerweNo ratings yet
- Mech4620 Group 12 Report PDFDocument12 pagesMech4620 Group 12 Report PDFAaron Hoytash100% (1)
- Modern Materials' Atomic StructureDocument47 pagesModern Materials' Atomic StructureAngelica MartinezNo ratings yet
- Homework Helpers - Chemistry PDFDocument311 pagesHomework Helpers - Chemistry PDFTamby100% (1)
- Wiles1994 - in Situ Stress Determination Using The Under-Excavation Technique - I. TheoryDocument8 pagesWiles1994 - in Situ Stress Determination Using The Under-Excavation Technique - I. TheoryRisantoNo ratings yet
- Evaluation of Dynamic Increment Component of Earth Pressure Behind The Retaining WallsDocument7 pagesEvaluation of Dynamic Increment Component of Earth Pressure Behind The Retaining WallsSivaramakrishnanNo ratings yet
- Troskie HJ Chapter 2Document87 pagesTroskie HJ Chapter 2Saran KuttyNo ratings yet
- 03-05-20 - SR - IIT - N-SUPER CHAINA&N-CHAINA - Jee-Adv - 2017 - P1 - GTA-13 - P-I - QPDocument19 pages03-05-20 - SR - IIT - N-SUPER CHAINA&N-CHAINA - Jee-Adv - 2017 - P1 - GTA-13 - P-I - QPsaloni guptaNo ratings yet
- 13C NMR Spectroscopy of Coumarin DerivativesDocument18 pages13C NMR Spectroscopy of Coumarin DerivativesGeorge MoshiashviliNo ratings yet
- Tarea 1 MunsonDocument4 pagesTarea 1 MunsonAlexander JohnsonNo ratings yet
- Nanoacoustic WaveguidesDocument51 pagesNanoacoustic WaveguidesWoodrow FoxNo ratings yet
- FEA 2 McqsDocument26 pagesFEA 2 Mcqsrak RoyNo ratings yet
- Permanent Magnet Moving Coil InstrumentDocument5 pagesPermanent Magnet Moving Coil InstrumentAnkit BatraNo ratings yet
- 1-Classification of Waves-16-02-2023Document12 pages1-Classification of Waves-16-02-2023efewfwedawasNo ratings yet
- 218Document261 pages218Ikhlas KittaNo ratings yet
- The CRS A255 RobotDocument20 pagesThe CRS A255 RobotnguyendattdhNo ratings yet
- Large Deflections of Cantilever BeamsDocument4 pagesLarge Deflections of Cantilever BeamsHasan Ayouby100% (1)
- Biazar Aminikhah Burgers EquationDocument7 pagesBiazar Aminikhah Burgers EquationSaeb AmirAhmadi ChomacharNo ratings yet
- Bulk DensityDocument4 pagesBulk DensitydeniNo ratings yet
- CH 04Document17 pagesCH 04Vishal PanwarNo ratings yet
- EquiprobabilityDocument2 pagesEquiprobabilitydanny222No ratings yet
- Eelab Exp8Document12 pagesEelab Exp8Leona Arreza Huerte100% (1)
- Energies: Exergy Analysis and Process Optimization With Variable Environment TemperatureDocument19 pagesEnergies: Exergy Analysis and Process Optimization With Variable Environment TemperatureFranco Camacho CanchariNo ratings yet
- Universiti Teknologi Mara Odl Exam 1: Confidential EM/ JUNE 2020/MEC551Document6 pagesUniversiti Teknologi Mara Odl Exam 1: Confidential EM/ JUNE 2020/MEC551Mohd HaniffNo ratings yet
- Catalogo Raycap Baja TensionDocument250 pagesCatalogo Raycap Baja TensionDomingo RuizNo ratings yet
- Resume AyanchattopadhyayDocument2 pagesResume Ayanchattopadhyayapi-163237383No ratings yet
- E024-01-0852-2017 Cat1Document7 pagesE024-01-0852-2017 Cat1churchill ochiengNo ratings yet
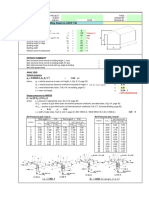
- Wind Analysis For Low-Rise Building, Based On ASCE 7-98Document2 pagesWind Analysis For Low-Rise Building, Based On ASCE 7-98reynoldNo ratings yet
- Grounding - Industry Experiences - 2013Document292 pagesGrounding - Industry Experiences - 2013Minhthien NguyenNo ratings yet