You might also like
- 15.2 Workbook - Optimization.solutions PDFDocument42 pages15.2 Workbook - Optimization.solutions PDFpatrick alvesNo ratings yet
- Daily Lesson Plan 11-Amber, Crystal, Emerald, Ruby, SapphireDocument3 pagesDaily Lesson Plan 11-Amber, Crystal, Emerald, Ruby, SapphireLeizel Jane LjNo ratings yet
- BSCS 1B Discrete Structure NotesDocument4 pagesBSCS 1B Discrete Structure NotesChristine LehmannNo ratings yet
- Predicate LogicDocument64 pagesPredicate LogicSaidur RahmanNo ratings yet
- Algorithms Question BankDocument15 pagesAlgorithms Question BankPablo AhmedNo ratings yet
- Suffix Arrays: Justin Zhang 24 May 2017Document5 pagesSuffix Arrays: Justin Zhang 24 May 2017Kartick GuptaNo ratings yet
- 8.3 Longest Increasing Sequence: 8 - 3 LongestincreasingsequenceDocument3 pages8.3 Longest Increasing Sequence: 8 - 3 LongestincreasingsequenceArpit SinghNo ratings yet
- A Statistical Theory of Chord Under Churn: AbstractDocument6 pagesA Statistical Theory of Chord Under Churn: AbstractNghĩa ZerNo ratings yet
- Lecture 4 Finite Fields (PART 1)Document24 pagesLecture 4 Finite Fields (PART 1)hulleganeshNo ratings yet
- Strings, Records and ArraysDocument36 pagesStrings, Records and ArraysPaul CockshottNo ratings yet
- Quine On DeductionDocument11 pagesQuine On DeductionLarry FjcNo ratings yet
- Shell SortDocument7 pagesShell Sortrider tayyabNo ratings yet
- Longest Common SubsequenceDocument11 pagesLongest Common SubsequencePervez_Alam_7255No ratings yet
- Stats 3Document3 pagesStats 3Ankita MishraNo ratings yet
- Randomized Algorithms Dsa CP3151Document14 pagesRandomized Algorithms Dsa CP31514023 KeerthanaNo ratings yet
- Reset Sequences For Monotonic AutomataDocument12 pagesReset Sequences For Monotonic AutomataBarehands HandsNo ratings yet
- LAB 2 PythonDocument6 pagesLAB 2 PythonShAmma SHNo ratings yet
- Shiv Nadar University CSD101: Introduction To Computing and Programming Lab #4 Expressions, Loops, Functions, 1D Arrays - 1Document2 pagesShiv Nadar University CSD101: Introduction To Computing and Programming Lab #4 Expressions, Loops, Functions, 1D Arrays - 1K.v. Sai TejaNo ratings yet
- Basic PRAM Algorithm Design TechniquesDocument13 pagesBasic PRAM Algorithm Design TechniquessandeeproseNo ratings yet
- Sets in Programming LanguagesDocument11 pagesSets in Programming LanguagesVibhanshu LodhiNo ratings yet
- SPSO DescriptionsDocument16 pagesSPSO DescriptionsE'zz Dine M'hamdiNo ratings yet
- Root Locus Diagram - GATE Study Material in PDFDocument7 pagesRoot Locus Diagram - GATE Study Material in PDFAtul Choudhary100% (1)
- Advanced Algorithms Course. Lecture Notes. Part 9: 3-SAT: How To Satisfy Most ClausesDocument4 pagesAdvanced Algorithms Course. Lecture Notes. Part 9: 3-SAT: How To Satisfy Most ClausesKasapaNo ratings yet
- Quick Sort Lomu ToDocument4 pagesQuick Sort Lomu ToJesus Moran PerezNo ratings yet
- Quiz 2Document8 pagesQuiz 2danaNo ratings yet
- Computing Persistent Homology: Afra Zomorodian and Gunnar CarlssonDocument15 pagesComputing Persistent Homology: Afra Zomorodian and Gunnar CarlssonPatricia CortezNo ratings yet
- CSF211_2024_MidsemSolutionsDocument6 pagesCSF211_2024_MidsemSolutionsDIY HJ HACKSNo ratings yet
- Time and Space Complexity HackereartDocument6 pagesTime and Space Complexity Hackerearttheora setiabudiNo ratings yet
- Algorithm Short NotesDocument11 pagesAlgorithm Short NotesShruti ChandraNo ratings yet
- Lecture 4: Finite Fields (PART 1) : PART 1: Groups, Rings, and Fields Theoretical Underpinnings of Modern CryptographyDocument26 pagesLecture 4: Finite Fields (PART 1) : PART 1: Groups, Rings, and Fields Theoretical Underpinnings of Modern CryptographyTalha MehmoodNo ratings yet
- Z-Transform Representation of Discrete-Time Signals and SystemsDocument40 pagesZ-Transform Representation of Discrete-Time Signals and SystemsFreddy PesantezNo ratings yet
- Linear Suffix Array Construction by Almost Pure Induced-SortingDocument10 pagesLinear Suffix Array Construction by Almost Pure Induced-SortingRob WentworthNo ratings yet
- Algorithmica: Sorting-Based Selection Algorithms For Hypercubic NetworksDocument18 pagesAlgorithmica: Sorting-Based Selection Algorithms For Hypercubic NetworksasddsdsaNo ratings yet
- Sequences: Institute of Lifelong Learning, University of Delhi Pg. 1Document38 pagesSequences: Institute of Lifelong Learning, University of Delhi Pg. 1Prashant KumarNo ratings yet
- NotestreamDocument5 pagesNotestreamArijeet PaulNo ratings yet
- Soft Computing 4Document23 pagesSoft Computing 4shivangiimishraa1819No ratings yet
- Worst Case Shellsort and Related Algorithms Requires Many ComparisonsDocument18 pagesWorst Case Shellsort and Related Algorithms Requires Many ComparisonsisometricatNo ratings yet
- Algorithm AssignmenteeeeeeeDocument13 pagesAlgorithm Assignmenteeeeeeekassahun gebrieNo ratings yet
- Switching Regression Models and Fuzzy Clustering: Richard CDocument10 pagesSwitching Regression Models and Fuzzy Clustering: Richard CAli Umair KhanNo ratings yet
- Permutations and The 15-Puzzle: Peter TrapaDocument13 pagesPermutations and The 15-Puzzle: Peter Trapajackregan1974No ratings yet
- Introduction to Algorithms & Median FindingDocument8 pagesIntroduction to Algorithms & Median FindingRameeshPaulNo ratings yet
- Chapter Nine Sorting and SearchingDocument30 pagesChapter Nine Sorting and Searchingtbijle0% (1)
- PLP 24Document43 pagesPLP 24ashokmohan87No ratings yet
- Zeta TypesDocument15 pagesZeta TypesSon TelmanNo ratings yet
- 1402 Columnar TranspositionDocument8 pages1402 Columnar TranspositionKrish ParekhNo ratings yet
- 1 Overview: Lecture 2 - February 3, 2005Document6 pages1 Overview: Lecture 2 - February 3, 2005ozturk_nihalNo ratings yet
- Homometric Number of GraphsDocument5 pagesHomometric Number of GraphsEditor IJRITCCNo ratings yet
- Efficient LCS Algorithm for Two SequencesDocument5 pagesEfficient LCS Algorithm for Two Sequencesk181090 Muhammad Anas Aziz SiddiquiNo ratings yet
- End Term Exam: Sukrit Chatterjee - E19ECE039Document6 pagesEnd Term Exam: Sukrit Chatterjee - E19ECE039Sukrit ChatterjeeNo ratings yet
- General Mathematics Learning ModuleDocument22 pagesGeneral Mathematics Learning ModuleAbdul Majeed Dida-agunNo ratings yet
- Ae Chapter2 MathDocument44 pagesAe Chapter2 MathjruanNo ratings yet
- Elementary Siphons of Petri NetsDocument31 pagesElementary Siphons of Petri NetsPetrus FendiyantoNo ratings yet
- Cap03 - Apostol T. M. - Mathematical AnalysisDocument23 pagesCap03 - Apostol T. M. - Mathematical AnalysisTeoria-MNo ratings yet
- SE3 Feaures NNDocument8 pagesSE3 Feaures NNPp DdNo ratings yet
- Department of Electrical Engineering EE365L: Communication SystemsDocument15 pagesDepartment of Electrical Engineering EE365L: Communication SystemsAbrahan ShahzadNo ratings yet
- Bottom Schur FunctionsDocument16 pagesBottom Schur Functionsapi-26401608No ratings yet
- A New Fast Computation of A PermanentDocument10 pagesA New Fast Computation of A PermanentAlex LaiknNo ratings yet
- Lecture 5Document15 pagesLecture 5AbdurroufNo ratings yet
- Linear CryptanalysisDocument19 pagesLinear CryptanalysisAnil KcNo ratings yet
- HW 1Document2 pagesHW 1Sumon SwiftNo ratings yet
- Particulate Morphology: Mathematics Applied to Particle AssembliesFrom EverandParticulate Morphology: Mathematics Applied to Particle AssembliesNo ratings yet
- Andhra Pradesh: Building A Model Immunization: SystemDocument8 pagesAndhra Pradesh: Building A Model Immunization: SystemfirefoxextslurperNo ratings yet
- The Illinois Open 2003: Transfigured Spite Toss-Ups by Chicago A (?)Document8 pagesThe Illinois Open 2003: Transfigured Spite Toss-Ups by Chicago A (?)firefoxextslurperNo ratings yet
- Maritime House Greenwich AbacusEstatesDocument13 pagesMaritime House Greenwich AbacusEstatesfirefoxextslurperNo ratings yet
- BrochureDocument6 pagesBrochurefirefoxextslurperNo ratings yet
- 6.931 Development of Inventions and Creative Ideas: Mit OpencoursewareDocument10 pages6.931 Development of Inventions and Creative Ideas: Mit OpencoursewarefirefoxextslurperNo ratings yet
- Sale Method FireDocument2 pagesSale Method FirefirefoxextslurperNo ratings yet
- 255 GuideDocument441 pages255 Guidefirefoxextslurper100% (1)
- Intro Excavators Info SheetDocument2 pagesIntro Excavators Info SheetfirefoxextslurperNo ratings yet
- t400 and t500 DatasheetDocument4 pagest400 and t500 Datasheetfirefoxextslurper100% (2)
- 5 7 Ket 2006 0752 1Document11 pages5 7 Ket 2006 0752 1firefoxextslurperNo ratings yet
- v5 7746JAP FacadeDocument4 pagesv5 7746JAP FacadefirefoxextslurperNo ratings yet
- ChanginglondonDocument52 pagesChanginglondonfirefoxextslurperNo ratings yet
- Algorithm Design TechniquesDocument10 pagesAlgorithm Design Techniquesfirefoxextslurper100% (1)
- Playing With Type Systems:: Automated Assistance in The Design of Programming LanguagesDocument13 pagesPlaying With Type Systems:: Automated Assistance in The Design of Programming LanguagesfirefoxextslurperNo ratings yet
- Reviewer'S Guide: Jetbrains' Dottrace 1.1Document6 pagesReviewer'S Guide: Jetbrains' Dottrace 1.1firefoxextslurperNo ratings yet
- C Anthony G. LamarcaDocument144 pagesC Anthony G. LamarcafirefoxextslurperNo ratings yet
- Efficient and General On-Stack Replacement For Aggressive Program SpecializationDocument8 pagesEfficient and General On-Stack Replacement For Aggressive Program SpecializationfirefoxextslurperNo ratings yet
- Inlining of Virtual Methods: AbstractDocument21 pagesInlining of Virtual Methods: AbstractfirefoxextslurperNo ratings yet
- Brian 92 UsingDocument6 pagesBrian 92 Usingfirefoxextslurper100% (3)
- MVC TemplatesDocument10 pagesMVC Templatesfirefoxextslurper100% (1)
- Java Memory Management Whitepaper - April 2006Document21 pagesJava Memory Management Whitepaper - April 2006Lionel100% (2)
- Priority Queues and MultisetsDocument18 pagesPriority Queues and MultisetsfirefoxextslurperNo ratings yet
- PlungeDocument28 pagesPlungefirefoxextslurperNo ratings yet
- Asymmetric Dekker SynchronizationDocument52 pagesAsymmetric Dekker SynchronizationfirefoxextslurperNo ratings yet
- HeapsDocument17 pagesHeapsfirefoxextslurper100% (1)
- MannersDocument14 pagesMannersfirefoxextslurper100% (1)
- Synchronization Public2Document89 pagesSynchronization Public2firefoxextslurperNo ratings yet
- It Era Tors in Action With NotesDocument39 pagesIt Era Tors in Action With NotesfirefoxextslurperNo ratings yet
- 170Document6 pages170firefoxextslurperNo ratings yet
- Gary L. Wise, Eric B. Hall - Counterexamples in Probability and Real Analysis (1993)Document224 pagesGary L. Wise, Eric B. Hall - Counterexamples in Probability and Real Analysis (1993)Yuhan ChuNo ratings yet
- Boolean Logic PDFDocument7 pagesBoolean Logic PDFSumit KumarNo ratings yet
- MMW Module 3Document3 pagesMMW Module 3Fabul, Azaliah Krezhane VillanuevaNo ratings yet
- Chapter 6: Formal Relational Query Languages: Database System Concepts, 6 EdDocument27 pagesChapter 6: Formal Relational Query Languages: Database System Concepts, 6 EdSathyan RvksNo ratings yet
- Lecture 5-Sop+posDocument21 pagesLecture 5-Sop+posIwan CuffysargeantNo ratings yet
- Solutionstoselectedexercises: I "11-Awodey-Sol" - 2010/2/19 - 7:30 - Page 279 - #1 I IDocument24 pagesSolutionstoselectedexercises: I "11-Awodey-Sol" - 2010/2/19 - 7:30 - Page 279 - #1 I IlopezmegoNo ratings yet
- Mod 3.2 FolDocument129 pagesMod 3.2 FolGUNEET SURANo ratings yet
- Discrete Mathematics - Chapter 7 Posets Lattices & Boolean AlgeDocument82 pagesDiscrete Mathematics - Chapter 7 Posets Lattices & Boolean AlgeBeautiful-Pretty Happy-WealthyNo ratings yet
- Implementation of Selection Sort and Insertion Sort AlgorithmDocument10 pagesImplementation of Selection Sort and Insertion Sort AlgorithmSyaravina MeilitaNo ratings yet
- Total Order: Binary RelationsDocument25 pagesTotal Order: Binary RelationsMaster ZenNo ratings yet
- AI Sem V Solution Nov 2O18 Pallavi Tawde PDFDocument22 pagesAI Sem V Solution Nov 2O18 Pallavi Tawde PDFMG GalactusNo ratings yet
- 02 Bits Ints Part1Document43 pages02 Bits Ints Part1dqltakedaNo ratings yet
- Knowledge Representation: First Order LogicDocument22 pagesKnowledge Representation: First Order LogicArchana PanwarNo ratings yet
- MCQ Unit 3Document13 pagesMCQ Unit 3zohaibNo ratings yet
- Levenberg-Marquardt Algorithms Vs Trust Region Algorithms: Frank Vanden BerghenDocument4 pagesLevenberg-Marquardt Algorithms Vs Trust Region Algorithms: Frank Vanden Berghenseyed mohammadNo ratings yet
- 5th Sem 21CS54 AI - Module2 Till Heuristuic FunctionDocument36 pages5th Sem 21CS54 AI - Module2 Till Heuristuic Functionvicky.sjbitNo ratings yet
- Unit - 2 Heuristic Functions, Best First SearchDocument23 pagesUnit - 2 Heuristic Functions, Best First Searchthummalavasanth5No ratings yet
- LOGIC COMPUTER SCIENCE FORMULA MODEL TABLEAUXDocument40 pagesLOGIC COMPUTER SCIENCE FORMULA MODEL TABLEAUXHotmangasi MNo ratings yet
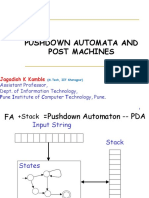
- Unit IV PUSHDOWN AUTOMATA AND POST MACHINESDocument247 pagesUnit IV PUSHDOWN AUTOMATA AND POST MACHINESMedhaj WakchaureNo ratings yet
- Compiler Construction: Lexical AnalysisDocument37 pagesCompiler Construction: Lexical AnalysisMUHAMMAD YAQOOBNo ratings yet
- Mutna LogikaDocument10 pagesMutna LogikaDamir MiletaNo ratings yet
- Set Theoryw1Document3 pagesSet Theoryw1anjliNo ratings yet
- Algorithm Homework HelpDocument17 pagesAlgorithm Homework HelpProgramming Homework HelpNo ratings yet
- B08CVQHQ8PDocument718 pagesB08CVQHQ8Pxxx100% (1)
- Denotational SemanticsDocument304 pagesDenotational SemanticsAnuj MoreNo ratings yet
- Structures and EnumerationsDocument11 pagesStructures and Enumerationsmuhammadkamran05No ratings yet
- Algorithm Explained Bubble Sort Polynomial MultiplicationDocument14 pagesAlgorithm Explained Bubble Sort Polynomial Multiplicationsomeone someoneNo ratings yet