You might also like
- A Seminar Report On UNMANNED AERIAL VEHICLEDocument20 pagesA Seminar Report On UNMANNED AERIAL VEHICLEAbhimanyu Singh Bhati84% (63)
- Small Unmanned Aircraft: Theory and PracticeFrom EverandSmall Unmanned Aircraft: Theory and PracticeRating: 4.5 out of 5 stars4.5/5 (2)
- Report On DroneDocument19 pagesReport On DroneSai VivekNo ratings yet
- 4.torque Diagram of The WingDocument3 pages4.torque Diagram of The WingBalaji AeroNo ratings yet
- Homework 1:: NACA 4-Digit Airfoils Analysis Using The Discrete Vortex MethodDocument8 pagesHomework 1:: NACA 4-Digit Airfoils Analysis Using The Discrete Vortex MethodvictorNo ratings yet
- Ae 17412 - Aerodynamics Lab - I (Manual)Document50 pagesAe 17412 - Aerodynamics Lab - I (Manual)EZHILMARANNo ratings yet
- The NRL Mite Air VehicleDocument14 pagesThe NRL Mite Air Vehicleamir_karimiNo ratings yet
- Airfoil Selection Procedure, Wind Tunnel Experimentation and Implementation of 6DOF Modeling On A Flying Wing Micro Aerial VehicleDocument31 pagesAirfoil Selection Procedure, Wind Tunnel Experimentation and Implementation of 6DOF Modeling On A Flying Wing Micro Aerial VehicleMol MolNo ratings yet
- Micro Air VehiclesDocument38 pagesMicro Air VehiclesRockey RoockNo ratings yet
- Improvement of Micro UAV Performance Using Tandem-Wing DesignDocument7 pagesImprovement of Micro UAV Performance Using Tandem-Wing Designdaniela fernandez suarezNo ratings yet
- Trajectory Path Control of Multiple Unmanned Aerial VehiclesDocument4 pagesTrajectory Path Control of Multiple Unmanned Aerial VehiclesdormentryNo ratings yet
- BICOPTERDocument22 pagesBICOPTERManideep Ananthula100% (4)
- Experimental Study of Full Authority Digital Engine Control (FADEC) System On Lycoming EngineDocument13 pagesExperimental Study of Full Authority Digital Engine Control (FADEC) System On Lycoming EngineMayank GuptaNo ratings yet
- Design and Aerodynamic Optimization of A Tri-Tilt RotorDocument22 pagesDesign and Aerodynamic Optimization of A Tri-Tilt RotorSourav SangamNo ratings yet
- Reverse Engineering and Aerodynamic Analysis of A Flying Wing UAV ATSChandranDocument13 pagesReverse Engineering and Aerodynamic Analysis of A Flying Wing UAV ATSChandrancsulbstudent1No ratings yet
- Flexible Wing Based Micro Air VehiclesDocument13 pagesFlexible Wing Based Micro Air VehiclesArun NairNo ratings yet
- Aerodynamic Optimization of The Angle of Attack ofDocument6 pagesAerodynamic Optimization of The Angle of Attack ofDavid AzadNo ratings yet
- Paper DLRK2017 Temme Trempler UAV Into Airport OperationsDocument11 pagesPaper DLRK2017 Temme Trempler UAV Into Airport OperationsOlanrewaju EmmanuelNo ratings yet
- Design and Analysis of An Unmaaned Aerial VehicleDocument8 pagesDesign and Analysis of An Unmaaned Aerial VehicleDeb PradhanNo ratings yet
- Micro Air VehicleDocument2 pagesMicro Air Vehicleseirra alpha100% (1)
- Submit Stencil: Advances in Unmanned Aerial Vehicles TechnologiesDocument13 pagesSubmit Stencil: Advances in Unmanned Aerial Vehicles TechnologiesÜmit Müfit GüzeyNo ratings yet
- Micro Air Vehicles: Y.Sudheer, G.Naganna, Email: Mobile No: 9700508696 Mobile No: 7893156002Document10 pagesMicro Air Vehicles: Y.Sudheer, G.Naganna, Email: Mobile No: 9700508696 Mobile No: 7893156002Srini VasuluNo ratings yet
- A Combined MBPC 2 DOF H ControllerDocument1 pageA Combined MBPC 2 DOF H ControllerGhada BeydounNo ratings yet
- Design, Implementation and Verification of A Quadrotor Tail-Sitter VTOL UAVDocument10 pagesDesign, Implementation and Verification of A Quadrotor Tail-Sitter VTOL UAVPedro Cezar Rodrigues BaltazarNo ratings yet
- Design and Simulation of A UAV Controller System With High ManeuverabilityDocument6 pagesDesign and Simulation of A UAV Controller System With High ManeuverabilityDeniz Can ÇetinelNo ratings yet
- Experimental Investigation of A Bi-PlaneDocument9 pagesExperimental Investigation of A Bi-PlaneRafael TavaresNo ratings yet
- VSAT2 - 33441 IJAERok15503 15512new2Document11 pagesVSAT2 - 33441 IJAERok15503 15512new2David SiegfriedNo ratings yet
- Aerodynamic Characteristics of A Flexible Wing MAV: January 2012Document8 pagesAerodynamic Characteristics of A Flexible Wing MAV: January 2012Tan ZhenyangNo ratings yet
- UAV For 3D Mapping Application A ReviewDocument27 pagesUAV For 3D Mapping Application A ReviewDiego PillcoNo ratings yet
- Real-Time Modeling of Agile Fixed-Wing UAV Aerodynamics: June 2015Document9 pagesReal-Time Modeling of Agile Fixed-Wing UAV Aerodynamics: June 2015Ulisses CasemiroNo ratings yet
- IJCAET Omni Wing PaperDocument14 pagesIJCAET Omni Wing PaperPrithvi AdhikaryNo ratings yet
- Comparative Investigation of VLM Codes For Joined-WingDocument5 pagesComparative Investigation of VLM Codes For Joined-WingInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Advances in Unmanned Aerial Vehicles TechnologiesDocument14 pagesAdvances in Unmanned Aerial Vehicles TechnologiesNAENWI YAABARINo ratings yet
- Local+Govt+Showcase DronesDocument5 pagesLocal+Govt+Showcase DronesProfessorArsalNo ratings yet
- 2009 Guidance - and - Nonlinear - Control - System - FoDocument24 pages2009 Guidance - and - Nonlinear - Control - System - FoabredulebreNo ratings yet
- Morphing Concepts For UAVsDocument8 pagesMorphing Concepts For UAVstyroneNo ratings yet
- FYP OrnithopterDocument22 pagesFYP OrnithopterFaisal Saleh RazaNo ratings yet
- Avionics 2marks 1Document46 pagesAvionics 2marks 1Ar JunNo ratings yet
- AIAA Infotech@Aerospace 2010: Exploiting Unmanned Aircraft Systems and Emerging TechnologiesDocument27 pagesAIAA Infotech@Aerospace 2010: Exploiting Unmanned Aircraft Systems and Emerging Technologiesdaniel.dupreNo ratings yet
- Control and Flight Test of A Tilt-Rotor Unmanned Aerial VehicleDocument12 pagesControl and Flight Test of A Tilt-Rotor Unmanned Aerial VehicleArshia MoftakharihajimirzaeiNo ratings yet
- IJETT-V32P221_4Document5 pagesIJETT-V32P221_4eno emoNo ratings yet
- Design and Analysis of A Gyroscopically Controlled Micro Air VehicleDocument20 pagesDesign and Analysis of A Gyroscopically Controlled Micro Air VehicleAndres MartinezNo ratings yet
- Real-Time Indoor Autonomous Vehicle Test Environment PDFDocument14 pagesReal-Time Indoor Autonomous Vehicle Test Environment PDFPiyush Kumar DongreNo ratings yet
- Article_Aerodynamic and flight characteristics UAVsDocument14 pagesArticle_Aerodynamic and flight characteristics UAVsVasyl LoginovNo ratings yet
- Research and Application of MAEU UAVsDocument20 pagesResearch and Application of MAEU UAVsThein Than LinNo ratings yet
- A Review On Vertical Take-Off and Landing (VTOL) Tilt-Rotor andDocument27 pagesA Review On Vertical Take-Off and Landing (VTOL) Tilt-Rotor andsohaibumer2001No ratings yet
- Concept Design For An UAVDocument5 pagesConcept Design For An UAVPedro Tati BarrosNo ratings yet
- Challenges Facing Future MAV DevelopmentDocument16 pagesChallenges Facing Future MAV DevelopmentNeoNo ratings yet
- Tilt Wing Model Design PDFDocument23 pagesTilt Wing Model Design PDFpadmanabhanrameshNo ratings yet
- Distributed Propulsion System Based Control of A Morphing Wing UAVDocument29 pagesDistributed Propulsion System Based Control of A Morphing Wing UAVR DNo ratings yet
- Report On Unmanned Aerial VehicleDocument21 pagesReport On Unmanned Aerial VehicleansNo ratings yet
- Automatic Flight Control Systems - Latest DevelopmentsDocument215 pagesAutomatic Flight Control Systems - Latest DevelopmentsMatevž BrojanNo ratings yet
- Ef 2000 TestingDocument12 pagesEf 2000 TestingLeiser HartbeckNo ratings yet
- ME211 SUMMARY REVIEW QUAD TILT WING UAVDocument4 pagesME211 SUMMARY REVIEW QUAD TILT WING UAVAliNo ratings yet
- 054-Micro Aerial Vehicles Design Challenges State of The Art ReviewDocument17 pages054-Micro Aerial Vehicles Design Challenges State of The Art Reviewkrishnamoorthy_krishNo ratings yet
- 148 PDFDocument8 pages148 PDFAAS SHNo ratings yet
- A Seminar Report On UNMANNED AERIAL VEHICLEDocument20 pagesA Seminar Report On UNMANNED AERIAL VEHICLEansNo ratings yet
- Unit 2Document21 pagesUnit 2vigneshNo ratings yet
- Design and Construction of A Novel QuadDocument23 pagesDesign and Construction of A Novel QuadAbdul Haseeb ShahNo ratings yet
- AdHoc Networks SI R2 FinalDocument29 pagesAdHoc Networks SI R2 FinalBoubacar SimporeNo ratings yet
- Design and Fabrication of Unmanned Arial Vehicle For Multi-Mission TasksDocument10 pagesDesign and Fabrication of Unmanned Arial Vehicle For Multi-Mission TasksTJPRC PublicationsNo ratings yet
- Chapter-1 Introduction of Micro Air VehiclesDocument28 pagesChapter-1 Introduction of Micro Air VehiclesRockey RoockNo ratings yet
- Nonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentFrom EverandNonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentNo ratings yet
- SP19416圖式20161104Document3 pagesSP19416圖式20161104Rodriguez ArthursNo ratings yet
- Aiaa 2010 1018Document11 pagesAiaa 2010 1018Rodriguez ArthursNo ratings yet
- Combustion and Flame: Kyung Ju Kim, Myung Hoon Cho, Soo Hyung KimDocument9 pagesCombustion and Flame: Kyung Ju Kim, Myung Hoon Cho, Soo Hyung KimRodriguez ArthursNo ratings yet
- National Cheng Kung University student examines causes and impacts of landslides in IndiaDocument17 pagesNational Cheng Kung University student examines causes and impacts of landslides in IndiaRodriguez ArthursNo ratings yet
- Access Global Online Research Ag ResourcesDocument2 pagesAccess Global Online Research Ag ResourcesRodriguez ArthursNo ratings yet
- Automobile Crank ShaftDocument8 pagesAutomobile Crank ShaftRodriguez ArthursNo ratings yet
- Implementation of A Skating Motion On A Spider Robot: Bachelor ThesisDocument55 pagesImplementation of A Skating Motion On A Spider Robot: Bachelor ThesisRodriguez ArthursNo ratings yet
- Mems Report JournalDocument4 pagesMems Report JournalRodriguez ArthursNo ratings yet
- Mos Fabrication Content BsDocument11 pagesMos Fabrication Content BsarumugamNo ratings yet
- Ijsetr Vol 3 Issue 5 1453 1457Document5 pagesIjsetr Vol 3 Issue 5 1453 1457Rodriguez ArthursNo ratings yet
- A356.0 Alloy DetailDocument2 pagesA356.0 Alloy DetailAdrian LimantoNo ratings yet
- Nafems Conference BroucherDocument4 pagesNafems Conference BroucherRodriguez ArthursNo ratings yet
- Polyjet Materials Data SheetDocument2 pagesPolyjet Materials Data SheetRodriguez ArthursNo ratings yet
- Optimization CrankShaft MechanismDocument22 pagesOptimization CrankShaft MechanismLakshman ReddyNo ratings yet
- 3D Printing TechnologyDocument5 pages3D Printing Technologyvasu088No ratings yet
- Volume 3 Issue 9 Paper 1Document21 pagesVolume 3 Issue 9 Paper 1Rodriguez ArthursNo ratings yet
- Skill Development Program for Employability EnhancementDocument15 pagesSkill Development Program for Employability EnhancementRodriguez ArthursNo ratings yet
- FIBER OPTICS Workshop BrouchureDocument15 pagesFIBER OPTICS Workshop BrouchureRodriguez ArthursNo ratings yet
- Report ProjectDocument53 pagesReport ProjectRodriguez ArthursNo ratings yet
- LS-PrePost Forming Aug1stDocument240 pagesLS-PrePost Forming Aug1stRodriguez ArthursNo ratings yet
- Solar Power Pesticides SprayerDocument4 pagesSolar Power Pesticides SprayerRodriguez Arthurs100% (1)
- Design Optimization TutorialDocument13 pagesDesign Optimization TutorialRodriguez ArthursNo ratings yet
- CAEA v145 Update ACTDocument22 pagesCAEA v145 Update ACTRodriguez ArthursNo ratings yet
- UAV Design TrainingDocument17 pagesUAV Design TrainingPritam AshutoshNo ratings yet
- Trends in Aerospace EngineeringDocument21 pagesTrends in Aerospace EngineeringRodriguez ArthursNo ratings yet
- XFLR5 Tut v1Document40 pagesXFLR5 Tut v1spandaglis0% (1)
- ABAQUS Tutorial Schedule and Access InfoDocument2 pagesABAQUS Tutorial Schedule and Access InfoAmit RajputNo ratings yet
- Ramesh S TalkDocument21 pagesRamesh S TalkRodriguez ArthursNo ratings yet
- NAL Workshop April8 VeenaDocument37 pagesNAL Workshop April8 VeenaRodriguez ArthursNo ratings yet
- GATE AE 2007-2014 With AnswersDocument131 pagesGATE AE 2007-2014 With AnswersAkshat SrivastavaNo ratings yet
- Chapter 03 - Aircraft Components and TerminologyDocument6 pagesChapter 03 - Aircraft Components and TerminologyRezwan Ahmed KhanNo ratings yet
- Estructuras Aeronáuticas Rev 001Document8 pagesEstructuras Aeronáuticas Rev 001Stefan GrozaNo ratings yet
- 054-Micro Aerial Vehicles Design Challenges State of The Art ReviewDocument17 pages054-Micro Aerial Vehicles Design Challenges State of The Art Reviewkrishnamoorthy_krishNo ratings yet
- Build The Barnaby Paper AeroplaneDocument7 pagesBuild The Barnaby Paper Aeroplanebmspam3913No ratings yet
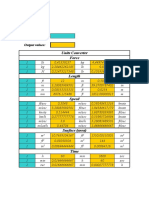
- Input Values: Output Values:: Units Converter ForceDocument5 pagesInput Values: Output Values:: Units Converter ForceJeyder GeorgeNo ratings yet
- Blade TS1Document16 pagesBlade TS1omartg168096No ratings yet
- Chapter 5: Incompressible Flow Over Finite WingsDocument54 pagesChapter 5: Incompressible Flow Over Finite WingsveeraraghavanNo ratings yet
- Hayes Proceedings PaperDocument21 pagesHayes Proceedings Papers4halaNo ratings yet
- Corrosion-Resistant Coatings for Turbine AirfoilsDocument2 pagesCorrosion-Resistant Coatings for Turbine AirfoilsAnonymous PJP78mSxNo ratings yet
- Aerodynamics of the Airplane: Understanding Airfoil Geometry and ForcesDocument26 pagesAerodynamics of the Airplane: Understanding Airfoil Geometry and ForcesERRAMESH1989No ratings yet
- Radial Based Func. & Marin Predator Algo. Savonius Blade ShapeDocument13 pagesRadial Based Func. & Marin Predator Algo. Savonius Blade ShapeBattle SagaNo ratings yet
- Conceptual Design Methodology For A BWB PDFDocument276 pagesConceptual Design Methodology For A BWB PDFJose Luis Sarango DiazNo ratings yet
- Falco UAV Low Reynolds Airfoil Design TestingDocument25 pagesFalco UAV Low Reynolds Airfoil Design TestingredxusNo ratings yet
- Aerodynamic principles for engineering applicationsDocument5 pagesAerodynamic principles for engineering applicationsNavjeet MeshramNo ratings yet
- Aerodynamic Ground EffectDocument12 pagesAerodynamic Ground EffectLev SorkinNo ratings yet
- PropellerDocument211 pagesPropellerRishi PuniyaNo ratings yet
- Airplane Design MRCP 2021Document92 pagesAirplane Design MRCP 2021Dayle Janzen DayaoNo ratings yet
- High Altitude AerodynamicsDocument7 pagesHigh Altitude Aerodynamicsaeroacademic100% (1)
- Final Project Report SalesDocument48 pagesFinal Project Report Salessaid mohamudNo ratings yet
- DCS-P-51D Flight Manual enDocument183 pagesDCS-P-51D Flight Manual entomcat14dNo ratings yet
- Performance Analysis of Horizontal Axis Wind TurbineDocument9 pagesPerformance Analysis of Horizontal Axis Wind TurbinesumitrochakrabortiNo ratings yet
- Flow Over An AIRFOILDocument25 pagesFlow Over An AIRFOILMuhammad AliNo ratings yet
- Aeroacoustic Measurements of Leading-Edge Slat Noise: Conference PaperDocument21 pagesAeroacoustic Measurements of Leading-Edge Slat Noise: Conference PaperPrince RajNo ratings yet
- Loessle2020 UAVRotorAcousticEmissionDocument10 pagesLoessle2020 UAVRotorAcousticEmissionZinou AoNo ratings yet
- Investigation On The Influence of Vortex Generators On AerofoilDocument4 pagesInvestigation On The Influence of Vortex Generators On AerofoilC ANo ratings yet
- Aircraft DesignDocument216 pagesAircraft DesignDivya SrinivasanNo ratings yet