You might also like
- Foss Lecture6Document15 pagesFoss Lecture6Jarsen21No ratings yet
- RNA-type Matchings: 1 Colored MatchingDocument3 pagesRNA-type Matchings: 1 Colored MatchingJarsen21No ratings yet
- RW IntroDocument2 pagesRW IntroJarsen21No ratings yet
- Foss Lecture5Document9 pagesFoss Lecture5Jarsen21No ratings yet
- Foss Lecture3 AppendixDocument4 pagesFoss Lecture3 AppendixJarsen21No ratings yet
- Foss Lecture4Document12 pagesFoss Lecture4Jarsen21No ratings yet
- Fin DginfDocument12 pagesFin DginfJarsen21No ratings yet
- Foss Lecture2Document11 pagesFoss Lecture2Jarsen21No ratings yet
- Foss Lecture1Document32 pagesFoss Lecture1Jarsen21No ratings yet
- ExistenceDocument19 pagesExistenceJarsen21No ratings yet
- DNA5Document9 pagesDNA5Jarsen21No ratings yet
- 03 The AttractivenessDocument33 pages03 The AttractivenessJarsen21No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Question IARDocument4 pagesQuestion IARAryan jay vermaNo ratings yet
- C191HM Powermeter and Harmonic Manager CommunicationsDocument30 pagesC191HM Powermeter and Harmonic Manager CommunicationsRoberto GarridoNo ratings yet
- Appraisal Assistant User ManualDocument55 pagesAppraisal Assistant User ManualDamian Padilla100% (3)
- EP 1110-1-8 Vo2 PDFDocument501 pagesEP 1110-1-8 Vo2 PDFyodiumhchltNo ratings yet
- Urban Road Types 25.01.2022Document5 pagesUrban Road Types 25.01.2022Balogun IbrahimNo ratings yet
- EXP.2 Enzyme Extraction From BacteriaDocument3 pagesEXP.2 Enzyme Extraction From BacteriaLinhNguyeNo ratings yet
- 21 API Functions PDFDocument14 pages21 API Functions PDFjet_mediaNo ratings yet
- Spare Parts List: Hydraulic BreakerDocument28 pagesSpare Parts List: Hydraulic BreakerTeknik MakinaNo ratings yet
- Therapeutic EffectsofWhole-BodyDevices Applying Pulsed Electromagnetic Fields (PEMF)Document11 pagesTherapeutic EffectsofWhole-BodyDevices Applying Pulsed Electromagnetic Fields (PEMF)Jeroan MonteiroNo ratings yet
- Highway Design ProjectDocument70 pagesHighway Design ProjectmuhammedNo ratings yet
- 3 DB RDMDocument49 pages3 DB RDMfaisal shahzadNo ratings yet
- Engine Performance Data at 1500 RPM: QSK 1 Cummins IncDocument4 pagesEngine Performance Data at 1500 RPM: QSK 1 Cummins IncBalariniRetífica100% (1)
- TMT Boron CoatingDocument6 pagesTMT Boron Coatingcvolkan1100% (2)
- Experiment No. 2 Rockwell Hardness Test IntroductionDocument3 pagesExperiment No. 2 Rockwell Hardness Test IntroductionAhmad Abd100% (1)
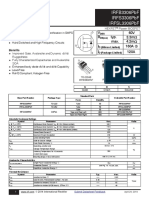
- Irfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120ADocument12 pagesIrfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120ADirson Volmir WilligNo ratings yet
- Budget of Work Sci5Document1 pageBudget of Work Sci5Jhoy Angeles PinlacNo ratings yet
- Chapter 6 AssignmentDocument6 pagesChapter 6 AssignmentRohit RajeevNo ratings yet
- Tutorial Week 5 AnswersDocument8 pagesTutorial Week 5 Answerspotato moon berryNo ratings yet
- Simple Harmonic Oscillator: 1 HamiltonianDocument10 pagesSimple Harmonic Oscillator: 1 HamiltonianAbdurrahman imamNo ratings yet
- Body Deassembly 9 Interior TrimDocument7 pagesBody Deassembly 9 Interior TrimCarlos TecnicNo ratings yet
- OIML R 137-1 & 2: Nternational EcommendationDocument76 pagesOIML R 137-1 & 2: Nternational EcommendationAMY WEINo ratings yet
- Aluminum: DR 900 Analytical ProcedureDocument4 pagesAluminum: DR 900 Analytical Procedurewulalan wulanNo ratings yet
- DC Power Supply and Voltage RegulatorsDocument73 pagesDC Power Supply and Voltage RegulatorsRalph Justine NevadoNo ratings yet
- GMS60CSDocument6 pagesGMS60CSAustinNo ratings yet
- Murata Data Caps ESR ESLDocument6 pagesMurata Data Caps ESR ESLecl_manNo ratings yet
- OK Flux 231 (F7AZ-EL12) PDFDocument2 pagesOK Flux 231 (F7AZ-EL12) PDFborovniskiNo ratings yet
- Notes For Class 11 Maths Chapter 8 Binomial Theorem Download PDFDocument9 pagesNotes For Class 11 Maths Chapter 8 Binomial Theorem Download PDFRahul ChauhanNo ratings yet
- Chapter VI DP and NetworkDocument66 pagesChapter VI DP and NetworkSirgut TesfayeNo ratings yet
- Book Review: Laser Fundamentals, 2nd Edition by William T. SilfvastDocument2 pagesBook Review: Laser Fundamentals, 2nd Edition by William T. SilfvastAbhishekNo ratings yet