You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 8 Physical Science Sample LessonsDocument51 pages8 Physical Science Sample LessonsPatrick FadriquelaNo ratings yet
- Bunker Survey Calculation Sheet 2Document3 pagesBunker Survey Calculation Sheet 2Martin PekićNo ratings yet
- Chapter 9. Estimating Centerline Temperature of A Buoyant Fire PlumeDocument6 pagesChapter 9. Estimating Centerline Temperature of A Buoyant Fire PlumeRicardo NapitupuluNo ratings yet
- As 1289.5.3.1-2004 Methods of Testing Soils For Engineering Purposes Soil Comp Action and Density Tests - DeteDocument2 pagesAs 1289.5.3.1-2004 Methods of Testing Soils For Engineering Purposes Soil Comp Action and Density Tests - DeteSAI Global - APAC100% (1)
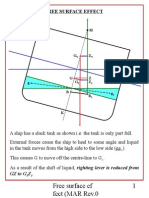
- 1e Free Surface EffectDocument16 pages1e Free Surface EffectShankar Singh0% (2)
- Module Thermodynamics 1Document37 pagesModule Thermodynamics 1Ryan Philip CatapangNo ratings yet
- Utilization of Dried Coconut (Cocus Nucifera) Leaves in Making CorkboardDocument25 pagesUtilization of Dried Coconut (Cocus Nucifera) Leaves in Making CorkboardJhie Anne Mercado Austria61% (18)
- Astm C-204Document8 pagesAstm C-204NicolásNo ratings yet
- New Directions 01-08-2017Document66 pagesNew Directions 01-08-2017రామకృష్ణ పాశలNo ratings yet
- Summative Assessment: Answer Key For The Exercises in The LessonDocument4 pagesSummative Assessment: Answer Key For The Exercises in The Lessonరామకృష్ణ పాశలNo ratings yet
- Parameters For Online Monitoring As Per Guidelines Annexure-1Document1 pageParameters For Online Monitoring As Per Guidelines Annexure-1రామకృష్ణ పాశలNo ratings yet
- Consolidated Alarm Management Software: Cams For HisDocument4 pagesConsolidated Alarm Management Software: Cams For Hisరామకృష్ణ పాశలNo ratings yet
- Set Up Info: Using A Cross-Over Cable For Network ConnectionDocument3 pagesSet Up Info: Using A Cross-Over Cable For Network Connectionరామకృష్ణ పాశలNo ratings yet
- Keyboard: Telugu Inscript ProDocument1 pageKeyboard: Telugu Inscript Proరామకృష్ణ పాశలNo ratings yet
- T640 Integrated Loop ProcessorDocument5 pagesT640 Integrated Loop Processorరామకృష్ణ పాశలNo ratings yet
- Answer Key For The Exercises in The LessonDocument3 pagesAnswer Key For The Exercises in The Lessonరామకృష్ణ పాశల100% (2)
- WWW Jabilli inDocument1 pageWWW Jabilli inరామకృష్ణ పాశలNo ratings yet
- Archer T2u v1 UgDocument55 pagesArcher T2u v1 Ugరామకృష్ణ పాశలNo ratings yet
- Revised Pension RulesDocument7 pagesRevised Pension Rulesరామకృష్ణ పాశలNo ratings yet
- Agricultural Machinery Part 2Document7 pagesAgricultural Machinery Part 2రామకృష్ణ పాశలNo ratings yet
- ABB University Analytics USA Training Catalog 2008Document23 pagesABB University Analytics USA Training Catalog 2008రామకృష్ణ పాశలNo ratings yet
- Unit & DimensionDocument44 pagesUnit & DimensionUpendra YadavNo ratings yet
- Partial Replacement With Corncob Ash Tiz ADocument12 pagesPartial Replacement With Corncob Ash Tiz ASagarKasarlaNo ratings yet
- Fluid Dynamics HomeworkDocument2 pagesFluid Dynamics HomeworkRaamses DíazNo ratings yet
- CH110 Chapter 1 NotesDocument46 pagesCH110 Chapter 1 NotesNørmäñ JuniorNo ratings yet
- Analysis of Archimedes Screw Design ParametersDocument5 pagesAnalysis of Archimedes Screw Design ParametersChương Đoàn HồngNo ratings yet
- SolidWorks Flow Simulation Defining A Custom FanDocument6 pagesSolidWorks Flow Simulation Defining A Custom Fanbaca88No ratings yet
- Dimensional Stability of Sandwich Core Materials: Standard Test Method ForDocument2 pagesDimensional Stability of Sandwich Core Materials: Standard Test Method ForJuanNo ratings yet
- 02 Chapter 3 - Weight Volume Relationships PDFDocument42 pages02 Chapter 3 - Weight Volume Relationships PDFAbd El Rhman Mohamed50% (2)
- Density Quiz 2 by SohamDocument7 pagesDensity Quiz 2 by SohamblahshhshshNo ratings yet
- Physics SS1 EquilibriumDocument28 pagesPhysics SS1 EquilibriumOlusolaNo ratings yet
- Heat Exchanger Report PDFDocument18 pagesHeat Exchanger Report PDFKeith QuinnNo ratings yet
- Installation of Thick Poured Lightweight Cellular Concrete Underlayments and Preparation of The Surface To Receive Resilient FlooringDocument4 pagesInstallation of Thick Poured Lightweight Cellular Concrete Underlayments and Preparation of The Surface To Receive Resilient FlooringAhmad Zubair RasulyNo ratings yet
- Importance of Soil TextureDocument6 pagesImportance of Soil Textureshaik shahinaNo ratings yet
- CHEM 1111 Experiment 1 Lab Report Basic Laboratory TechniquesDocument16 pagesCHEM 1111 Experiment 1 Lab Report Basic Laboratory TechniquesDARYLL WAYNE MATUTINONo ratings yet
- Excess Molar Volume of Binary Mixtures of Dehydrolinalool: + Alkanols at 308.15 KDocument5 pagesExcess Molar Volume of Binary Mixtures of Dehydrolinalool: + Alkanols at 308.15 KAmit YadavNo ratings yet
- FT 12 Gr10 P2 Qs (Pressure)Document7 pagesFT 12 Gr10 P2 Qs (Pressure)Sharuvindan Nair100% (1)
- Mass Volume FormulaDocument19 pagesMass Volume FormulaSydney CuencaNo ratings yet
- Maximum Moisture Content MethodDocument9 pagesMaximum Moisture Content MethodGuilherme PrataNo ratings yet
- Tutorial MecwayDocument81 pagesTutorial MecwayD BNo ratings yet
- B 604Document127 pagesB 604Jonathan Tia Guan KhaiNo ratings yet
- 2019 Sec 1 Express Science SA2 Hougang SecondaryDocument18 pages2019 Sec 1 Express Science SA2 Hougang SecondaryMonali PNo ratings yet