You might also like
- Control Valve FunctionDocument1 pageControl Valve FunctionKapil VermaNo ratings yet
- Management: Prepared By-Ms. Anshu M.Sc. Nursing 2 Year KGMU Institute of NursingDocument35 pagesManagement: Prepared By-Ms. Anshu M.Sc. Nursing 2 Year KGMU Institute of NursingKapil VermaNo ratings yet
- Human Resource Management: Meenakshi Soni Lecturer College of Nursing, JaipurDocument18 pagesHuman Resource Management: Meenakshi Soni Lecturer College of Nursing, JaipurKapil VermaNo ratings yet
- Pert Gantt Chart & MBO: Presesnted By: Navaneeta Kusum M.Sc. NSG 2 YRDocument31 pagesPert Gantt Chart & MBO: Presesnted By: Navaneeta Kusum M.Sc. NSG 2 YRKapil VermaNo ratings yet
- Material ManagementDocument16 pagesMaterial ManagementKapil VermaNo ratings yet
- Nursing AuditDocument29 pagesNursing AuditKapil VermaNo ratings yet
- Bench Marking: Meenakshi Soni Lecturer College of Nursing, JaipurDocument11 pagesBench Marking: Meenakshi Soni Lecturer College of Nursing, JaipurKapil VermaNo ratings yet
- History of Community Health and Community Health Nursing: Uma J Deaver Asst Professor MM College of NursingDocument46 pagesHistory of Community Health and Community Health Nursing: Uma J Deaver Asst Professor MM College of NursingKapil VermaNo ratings yet
- Nursing AuditDocument26 pagesNursing AuditKapil VermaNo ratings yet
- Principlesofbudgetinginnursingadmin 140215014709 Phpapp02Document27 pagesPrinciplesofbudgetinginnursingadmin 140215014709 Phpapp02SrideviRaviNo ratings yet
- Development of COMMUNITY HEALTH NURSING in IndiaDocument12 pagesDevelopment of COMMUNITY HEALTH NURSING in IndiaKapil Verma100% (3)
- Motor Capcitor SelectionDocument10 pagesMotor Capcitor SelectionKapil VermaNo ratings yet
- BUDGETING ESSENTIALS FOR NURSING SCHOOLSDocument46 pagesBUDGETING ESSENTIALS FOR NURSING SCHOOLSashraf100% (1)
- Meo 1 - Question BankDocument81 pagesMeo 1 - Question BankVijai Abraham80% (5)
- Meo 1 - Question BankDocument81 pagesMeo 1 - Question BankVijai Abraham80% (5)
- Arduino Playground - ProcessingDocument3 pagesArduino Playground - ProcessingKapil VermaNo ratings yet
- Srvastava SirDocument2 pagesSrvastava SirKapil VermaNo ratings yet
- Address LionDocument16 pagesAddress LionKapil VermaNo ratings yet
- MKDWX PTKFK G6HTV 2G2GJ R23Q7Document1 pageMKDWX PTKFK G6HTV 2G2GJ R23Q7Kapil VermaNo ratings yet
- Dicrectorate of PanamaDocument9 pagesDicrectorate of PanamaKapil VermaNo ratings yet
- 3-Axis Accelerometer and Processing - Robot Is HappyDocument4 pages3-Axis Accelerometer and Processing - Robot Is HappyKapil VermaNo ratings yet
- Marine Engineering PracticeDocument13 pagesMarine Engineering PracticeKapil Verma100% (1)
- Environmental ProjectDocument14 pagesEnvironmental ProjectKapil VermaNo ratings yet
- Amendments To The MARPOL Convention From 01 January 2013.: 1. BackgroundDocument10 pagesAmendments To The MARPOL Convention From 01 January 2013.: 1. BackgroundKapil VermaNo ratings yet
- Pujangga Piping - The Meaning of Valves - Only The BasicDocument21 pagesPujangga Piping - The Meaning of Valves - Only The BasicKapil VermaNo ratings yet
- Assignment No:: ToolsDocument3 pagesAssignment No:: ToolsKapil VermaNo ratings yet
- Propeller Cap TurbineDocument4 pagesPropeller Cap TurbineKapil VermaNo ratings yet
- Meo NotesDocument2 pagesMeo NotesKapil VermaNo ratings yet
- AllDocument112 pagesAllKapil VermaNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Silent Speech Interface Using Facial Recognition and ElectromyographyDocument15 pagesSilent Speech Interface Using Facial Recognition and ElectromyographyM KISHORE,CSE(19-23) Vel Tech, Chennai100% (2)
- Jurnal 5Document11 pagesJurnal 5MONICA YOLANDA SILITONGANo ratings yet
- Decolonial Pedagogies Walking and Asking Notes To Paulo Freire From AbyaYalaDocument14 pagesDecolonial Pedagogies Walking and Asking Notes To Paulo Freire From AbyaYalaIsabella RodriguezNo ratings yet
- Object Oriented Programming Using C++ CST-157 Unit-Iii Files Chapter-9Document29 pagesObject Oriented Programming Using C++ CST-157 Unit-Iii Files Chapter-9SheshNo ratings yet
- Phonetic Mistakes RomaniansDocument12 pagesPhonetic Mistakes RomaniansClaudia HoteaNo ratings yet
- A Math Summary BookletDocument113 pagesA Math Summary BookletbusinessNo ratings yet
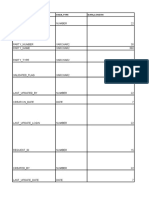
- TCA Table StructureDocument141 pagesTCA Table StructureSurajklNo ratings yet
- Intro CH 01blooking Inside The Computer SystemDocument17 pagesIntro CH 01blooking Inside The Computer Systemapi-247714257No ratings yet
- Industrial Monitoring with Wi-Fi SensorsDocument3 pagesIndustrial Monitoring with Wi-Fi Sensorspraveen_kodgirwarNo ratings yet
- Islcollective Worksheets Adults Elementary School High School Present Continuous Progressive Tense Actions Actions Gramm 476771917593a4078407b52 27444485Document2 pagesIslcollective Worksheets Adults Elementary School High School Present Continuous Progressive Tense Actions Actions Gramm 476771917593a4078407b52 27444485An Nukman100% (2)
- Pack 1, An IDocument22 pagesPack 1, An IHustiuc RomeoNo ratings yet
- Basic Econometrics with Stata: An OverviewDocument222 pagesBasic Econometrics with Stata: An OverviewFábio LúcioNo ratings yet
- 15) Azure AD and IAMDocument33 pages15) Azure AD and IAMhanuman challisaNo ratings yet
- ESL Exam Level 1Document3 pagesESL Exam Level 1Anonymous APYeoIbJcINo ratings yet
- Practical Raspberry Pi Projects by Imagine Publishing LTDDocument164 pagesPractical Raspberry Pi Projects by Imagine Publishing LTDRomeo Lopez AyaneguiNo ratings yet
- Lesson Plan in A CaféDocument5 pagesLesson Plan in A CaféBiank SuNo ratings yet
- Nexus Index TopicsDocument3 pagesNexus Index TopicsciscoNo ratings yet
- DLP Et Al ApprovedDocument4 pagesDLP Et Al ApprovedMarc GarciaNo ratings yet
- Child Development PedagogyDocument4 pagesChild Development PedagogySwarup UpadhyayaNo ratings yet
- Baby Shower Wish List by SlidesgoDocument52 pagesBaby Shower Wish List by Slidesgo20. Lê Thị Khánh LinhNo ratings yet
- Gang IntellIgence ManualDocument131 pagesGang IntellIgence Manualrickoshea16088% (8)
- Creativity and DiscourseDocument17 pagesCreativity and DiscourseenrodneyNo ratings yet
- MVI56E-MNET MNETXT DatasheetDocument3 pagesMVI56E-MNET MNETXT DatasheetSeon CharlesNo ratings yet
- Gula DarahDocument10 pagesGula DarahAditria SuryaningratNo ratings yet
- Linux File System StructureDocument14 pagesLinux File System Structurejeromet681No ratings yet
- Andrae Crouch perfect peaceDocument3 pagesAndrae Crouch perfect peaceMoises de JesusNo ratings yet
- Train Is ... Than Bus.: I. Berilah Tanda Silang (X) Pada Huruf A, B, C, Atau D Di Depan Jawaban Yang Benar !Document2 pagesTrain Is ... Than Bus.: I. Berilah Tanda Silang (X) Pada Huruf A, B, C, Atau D Di Depan Jawaban Yang Benar !Gon GunawirNo ratings yet
- Abap Full Mock Test AnsDocument14 pagesAbap Full Mock Test AnsGayathri SNo ratings yet
- Coordination and Juxtaposition of Adjectives in The Latin NPDocument27 pagesCoordination and Juxtaposition of Adjectives in The Latin NPLisi Perez MuñozNo ratings yet
- Insurance Management System Project ReportDocument62 pagesInsurance Management System Project ReportBikashBerma50% (8)