You might also like
- Plane Print Big Bobber PDFDocument52 pagesPlane Print Big Bobber PDFPDDELUCA100% (2)
- Vdoc - Pub Microchip Fabrication A Practical Guide To Semiconductor ProcessingDocument979 pagesVdoc - Pub Microchip Fabrication A Practical Guide To Semiconductor Processingsaiganeah884No ratings yet
- Classical Mechanics CH 3 So LNDocument6 pagesClassical Mechanics CH 3 So LNJoel SolomonNo ratings yet
- Spinning Top With Constant Precession and Zero NutationDocument3 pagesSpinning Top With Constant Precession and Zero NutationMTNo ratings yet
- 259 Geometry Writings by Christopher J. BradleyDocument1,079 pages259 Geometry Writings by Christopher J. Bradleyestoyanovvd0% (1)
- AST-V57-Sem1-S24015 Classical MechanicsDocument287 pagesAST-V57-Sem1-S24015 Classical MechanicsManoj Ghagas100% (1)
- Lecture 24Document8 pagesLecture 24gewaray536No ratings yet
- Fermat 2Document24 pagesFermat 2acomillaNo ratings yet
- Syllabus: 1 Course StructureDocument5 pagesSyllabus: 1 Course StructureSatyankar Chandra100% (1)
- Emii17sol 2 PDFDocument24 pagesEmii17sol 2 PDFJesus Antonio Jimenez AriasNo ratings yet
- 2016 Complex Analysis Problems SolutionsDocument102 pages2016 Complex Analysis Problems Solutionsas_5kNo ratings yet
- Hamiltonian Mechanics: 4.1 Hamilton's EquationsDocument9 pagesHamiltonian Mechanics: 4.1 Hamilton's EquationsRyan TraversNo ratings yet
- Raychaudhuri Equation in The Finsler-Randers Space PDFDocument20 pagesRaychaudhuri Equation in The Finsler-Randers Space PDFSHOUVIK SADHUKHANNo ratings yet
- Rigid Bodies: 2.1 Many-Body SystemsDocument17 pagesRigid Bodies: 2.1 Many-Body SystemsRyan TraversNo ratings yet
- Syllabus: Singapore Junior Physics OlympiadDocument3 pagesSyllabus: Singapore Junior Physics OlympiadTeddy OngNo ratings yet
- Relativistic Electromagnetism: 6.1 Four-VectorsDocument15 pagesRelativistic Electromagnetism: 6.1 Four-VectorsRyan TraversNo ratings yet
- A Simple Derivation of The Lorentz TransformationDocument4 pagesA Simple Derivation of The Lorentz TransformationMatthew AustinNo ratings yet
- Introductory Statistical MechanicsDocument4 pagesIntroductory Statistical MechanicsParthaNo ratings yet
- Dynamical Systems: 5.1 Phase PortraitsDocument36 pagesDynamical Systems: 5.1 Phase PortraitsRyan TraversNo ratings yet
- Physics Changes 2016Document10 pagesPhysics Changes 2016SamimNo ratings yet
- Coleman WeinbergDocument23 pagesColeman WeinbergKostas Roubedakis100% (1)
- Lagrangian Mechanics: 3.1 Action PrincipleDocument15 pagesLagrangian Mechanics: 3.1 Action PrincipleRyan TraversNo ratings yet
- Landau TheoryDocument172 pagesLandau TheoryAnonymous 1VDf9PNo ratings yet
- Richard FeynmanDocument2 pagesRichard Feynmanmuzammalsafdar100% (1)
- Lectures On Spectral Geometry - Pierre. H. BerardDocument270 pagesLectures On Spectral Geometry - Pierre. H. BerardGregório Silva NetoNo ratings yet
- Bounds6Document12 pagesBounds6Jack NachamkinNo ratings yet
- QAU Mphil Test SylabusDocument6 pagesQAU Mphil Test SylabusAsim Zeeshan100% (1)
- Foot Dummit 1) 1.1 (9b, 22, 25, 31) & 1.2 (16) & 1.3 (19, 20) & 1.4 (8) & 1.5 (1) & 1.6 (4, 9, 17, 20, 24, 26) & 1.7 (18, 19, 20, 23)Document9 pagesFoot Dummit 1) 1.1 (9b, 22, 25, 31) & 1.2 (16) & 1.3 (19, 20) & 1.4 (8) & 1.5 (1) & 1.6 (4, 9, 17, 20, 24, 26) & 1.7 (18, 19, 20, 23)MathMan22No ratings yet
- Upgrade Your Physics PDFDocument136 pagesUpgrade Your Physics PDFAaron KowNo ratings yet
- Euclidean and Affine Transformations: Geometric TransformationsFrom EverandEuclidean and Affine Transformations: Geometric TransformationsNo ratings yet
- Curvature, Riemman, and Christoffel SymbolsDocument5 pagesCurvature, Riemman, and Christoffel SymbolsCarolina Torres Lozano Ψ100% (3)
- Lie Derivative ExplanationDocument21 pagesLie Derivative ExplanationNacho Izquierdo PérezNo ratings yet
- Abstract Algebra Assignment SolutionDocument12 pagesAbstract Algebra Assignment SolutionStudy With MohitNo ratings yet
- Exercises in Introductory Physics PDFDocument2 pagesExercises in Introductory Physics PDFChadNo ratings yet
- An Argand Diagram For Two by Two MatricesDocument9 pagesAn Argand Diagram For Two by Two MatricesElias Costa GrivoyannisNo ratings yet
- Fermat's Principle - Wikipedia PDFDocument105 pagesFermat's Principle - Wikipedia PDFSanjai KannaNo ratings yet
- An Introduction To Geometric Algebra With Some PreDocument16 pagesAn Introduction To Geometric Algebra With Some PreYoussef YousryNo ratings yet
- Higgs BundlesDocument125 pagesHiggs BundlesIsmail KhanNo ratings yet
- Complex Analysis For Mathematics and Engineering: 5th Edition John H. Mathews and Russell W. HowellDocument10 pagesComplex Analysis For Mathematics and Engineering: 5th Edition John H. Mathews and Russell W. HowellGharib MahmoudNo ratings yet
- Introduction To Statistical ThermodynamicsDocument29 pagesIntroduction To Statistical ThermodynamicsYasir AliNo ratings yet
- The Ascendancy of The Laplace Transform and How It Came About PDFDocument22 pagesThe Ascendancy of The Laplace Transform and How It Came About PDFJose Alejandro MariscalNo ratings yet
- A History of Vector Analysis PDFDocument18 pagesA History of Vector Analysis PDFNithish Anuj100% (1)
- E The Master of AllDocument12 pagesE The Master of AllchungNo ratings yet
- Relativity and Fundamental Physics: October 2016Document7 pagesRelativity and Fundamental Physics: October 2016Mgsi SofthouseNo ratings yet
- Chapter 2 PDFDocument38 pagesChapter 2 PDFNurul Dayah100% (1)
- (Reidel Texts in The Mathematical Sciences 2) Harry A. Mavromatis (Auth.) - Exercises in Quantum Mechanics - A Collection of Illustrative Problems and Their Solutions-Springer Netherlands (1987) PDFDocument190 pages(Reidel Texts in The Mathematical Sciences 2) Harry A. Mavromatis (Auth.) - Exercises in Quantum Mechanics - A Collection of Illustrative Problems and Their Solutions-Springer Netherlands (1987) PDFAlisson CostaNo ratings yet
- Self-Similarity and The Geometric Requirements ForDocument8 pagesSelf-Similarity and The Geometric Requirements ForFabricio Cen de CardNo ratings yet
- Atom 1959 Condon Shortley The Theory of Atomic SpectraDocument467 pagesAtom 1959 Condon Shortley The Theory of Atomic SpectraRaul Felix Carita Montero100% (1)
- Functions I: Supporting Australian Mathematics ProjectDocument31 pagesFunctions I: Supporting Australian Mathematics ProjectLovely Chetan0% (1)
- Primes and RiemannDocument9 pagesPrimes and RiemanndiallomailNo ratings yet
- An Elementary Course in Synthetic Projective GeometryFrom EverandAn Elementary Course in Synthetic Projective GeometryNo ratings yet
- Chow B., Lu P., Ni L. - Hamilton's Ricci Flow, Vol.1 (2005)Document374 pagesChow B., Lu P., Ni L. - Hamilton's Ricci Flow, Vol.1 (2005)Ran KorNo ratings yet
- Bose Einstein CondensateDocument10 pagesBose Einstein Condensatejoeloduro9320No ratings yet
- Book To Be Followed For ISI MDocument10 pagesBook To Be Followed For ISI Mp1v1nNo ratings yet
- F Ma PDFDocument259 pagesF Ma PDFHenry ZengNo ratings yet
- Michail Zak and Colin P. Williams - Quantum Neural NetsDocument48 pagesMichail Zak and Colin P. Williams - Quantum Neural Netsdcsi3No ratings yet
- En+l - en En+l - en En: E - 8mL2 TDocument4 pagesEn+l - en En+l - en En: E - 8mL2 TAryan VermaNo ratings yet
- Calculus For Fun Approach PDFDocument3 pagesCalculus For Fun Approach PDFkdNo ratings yet
- Unit 10 Strain Energy: StructureDocument21 pagesUnit 10 Strain Energy: StructureRiddhima MukherjeeNo ratings yet
- Machine Foundation Irrigation Pump 1762001 559Document1 pageMachine Foundation Irrigation Pump 1762001 559Riddhima MukherjeeNo ratings yet
- Is 800:2007Document150 pagesIs 800:2007crajtry100% (2)
- RedBus TicketDocument1 pageRedBus TicketRiddhima MukherjeeNo ratings yet
- India's Union Budget Including MEA's Budget Resources and Implications For Domestic Economic Growth and Development Partnership AdministrationDocument4 pagesIndia's Union Budget Including MEA's Budget Resources and Implications For Domestic Economic Growth and Development Partnership AdministrationRiddhima MukherjeeNo ratings yet
- Unit 11 Thiermal Stresses: StructureDocument15 pagesUnit 11 Thiermal Stresses: StructureRiddhima MukherjeeNo ratings yet
- 2007 Case StudyDocument7 pages2007 Case StudyRiddhima MukherjeeNo ratings yet
- Unit Transfomtions and Linear EquationsDocument16 pagesUnit Transfomtions and Linear EquationsRiddhima MukherjeeNo ratings yet
- Unit 5 Principal Stresses and Strains: StructureDocument32 pagesUnit 5 Principal Stresses and Strains: StructureRiddhima MukherjeeNo ratings yet
- Unit 1 Differential Calculus: StructureDocument51 pagesUnit 1 Differential Calculus: StructureRiddhima MukherjeeNo ratings yet
- Unit 5 Complex Numbers: StructureDocument15 pagesUnit 5 Complex Numbers: StructureRiddhima MukherjeeNo ratings yet
- Matrices and DeterminantsDocument36 pagesMatrices and DeterminantsRiddhima MukherjeeNo ratings yet
- Unit Theorems Probability: StructureDocument23 pagesUnit Theorems Probability: StructureRiddhima MukherjeeNo ratings yet
- Unit 7 Statistics: StructureDocument31 pagesUnit 7 Statistics: StructureRiddhima MukherjeeNo ratings yet
- Unit 8 Vector Algebra: StructureDocument31 pagesUnit 8 Vector Algebra: StructureRiddhima MukherjeeNo ratings yet
- Introduction To Probability: Unit 1Document22 pagesIntroduction To Probability: Unit 1Riddhima MukherjeeNo ratings yet
- Unit Partial Differentiatiion: SeveralDocument34 pagesUnit Partial Differentiatiion: SeveralRiddhima MukherjeeNo ratings yet
- Differential EquationsDocument28 pagesDifferential EquationsRiddhima MukherjeeNo ratings yet
- Unit Volume Integral: StructureDocument28 pagesUnit Volume Integral: StructureRiddhima MukherjeeNo ratings yet
- Unit Definite Integral: StructureDocument26 pagesUnit Definite Integral: StructureRiddhima MukherjeeNo ratings yet
- Applications of DerivativesDocument33 pagesApplications of DerivativesRiddhima MukherjeeNo ratings yet
- Linear Equations: Unit 14 AND Euclidean SpacesDocument24 pagesLinear Equations: Unit 14 AND Euclidean SpacesRiddhima MukherjeeNo ratings yet
- Applications 2Document39 pagesApplications 2Riddhima MukherjeeNo ratings yet
- Unit 4 Definite Integrals: StructureDocument19 pagesUnit 4 Definite Integrals: StructureRiddhima MukherjeeNo ratings yet
- Dear All, I Edited and Collected Links For IS Codes, IRC Etc From Following Links On Date 20-March-2009Document15 pagesDear All, I Edited and Collected Links For IS Codes, IRC Etc From Following Links On Date 20-March-2009Riddhima MukherjeeNo ratings yet
- Clarification of ExpectationDocument55 pagesClarification of ExpectationRiddhima MukherjeeNo ratings yet
- Inductive Sensor NCB2-12GM35-N0-V1: DimensionsDocument3 pagesInductive Sensor NCB2-12GM35-N0-V1: DimensionsmhaioocNo ratings yet
- A1 - Full Papers PS1 10834 2022Document18 pagesA1 - Full Papers PS1 10834 2022DmitryNo ratings yet
- User Manual: Shimadzu Advanced Flow Technology: Heart Cut SoftwareDocument19 pagesUser Manual: Shimadzu Advanced Flow Technology: Heart Cut SoftwareHarold GamaNo ratings yet
- Predictive Data Mining and Discovering Hidden Values of Data WarehouseDocument5 pagesPredictive Data Mining and Discovering Hidden Values of Data WarehouseLangit Merah Di SelatanNo ratings yet
- Ama WB NX PDFDocument36 pagesAma WB NX PDFirinaNo ratings yet
- Calculation and Adjustment of Silica (Sio) Scaling For Reverse OsmosisDocument3 pagesCalculation and Adjustment of Silica (Sio) Scaling For Reverse OsmosismerksssNo ratings yet
- Summa Roll Cutters: S One - S Class 2 Series World Renowned Vinyl and Contour CuttersDocument32 pagesSumma Roll Cutters: S One - S Class 2 Series World Renowned Vinyl and Contour CuttersPU PUNo ratings yet
- Additive Manufacturing 2Document24 pagesAdditive Manufacturing 2Classic PrintersNo ratings yet
- Gilian Gilibrator ManualDocument25 pagesGilian Gilibrator ManualEvaavivahNo ratings yet
- Solution To Q9 (Vii) Tut-Sheet 3 (By Professor Santanu Dey)Document1 pageSolution To Q9 (Vii) Tut-Sheet 3 (By Professor Santanu Dey)Prayas JainNo ratings yet
- CV Bilal Ur Rehman RF EngineerDocument4 pagesCV Bilal Ur Rehman RF Engineermudassar2k4No ratings yet
- System Flyer PROSLIDE 32 B - V5.0 - 2020-03-09 PDFDocument10 pagesSystem Flyer PROSLIDE 32 B - V5.0 - 2020-03-09 PDFeduardoNo ratings yet
- Ch23 Review ProblemsDocument25 pagesCh23 Review ProblemsحمدةالنهديةNo ratings yet
- Modbus RegisterDocument7 pagesModbus RegisterZuniiga AndersonNo ratings yet
- DRV8353Document92 pagesDRV8353Lu HoaNo ratings yet
- Tutorial Module 3Document24 pagesTutorial Module 3erieshaNo ratings yet
- Precision 10 40 Operating InstructionsDocument27 pagesPrecision 10 40 Operating InstructionsDaniel PeluffoNo ratings yet
- Changes Around Us Science - Class-ViDocument28 pagesChanges Around Us Science - Class-ViAmit SharmaNo ratings yet
- HBC 2109 Hps 2106 (Kisii)Document3 pagesHBC 2109 Hps 2106 (Kisii)123 321No ratings yet
- Week 8-Wind Energy Generation - ELEC2300Document29 pagesWeek 8-Wind Energy Generation - ELEC2300Look AxxNo ratings yet
- Optimization of AirfoilsDocument9 pagesOptimization of AirfoilsMD SHAHRIARMAHMUDNo ratings yet
- DYA Series 2018Document22 pagesDYA Series 2018Abo MohammedNo ratings yet
- Fire Pump ControllerDocument45 pagesFire Pump ControllerRamasamy Kalyanasundaram RameshNo ratings yet
- Madanapalle Institute of Technology & ScienceDocument40 pagesMadanapalle Institute of Technology & ScienceRavikanth NssNo ratings yet
- Laboratory Investigations On The Causes of Road Failures Constructed AlongDocument8 pagesLaboratory Investigations On The Causes of Road Failures Constructed AlongMulugeta DessieNo ratings yet
- The Impact of Credit Risk On The Financial Performance of Chinese BanksDocument5 pagesThe Impact of Credit Risk On The Financial Performance of Chinese Banksvandv printsNo ratings yet
- PygmyManual v2 - 31Document67 pagesPygmyManual v2 - 31myplaxisNo ratings yet
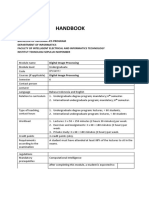
- IF184952 Digital Image ProcessingDocument3 pagesIF184952 Digital Image Processingshela malaNo ratings yet