Professional Documents
Culture Documents
Linear Wave Theory
Uploaded by
Muhammad JatiCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Linear Wave Theory
Uploaded by
Muhammad JatiCopyright:
Available Formats
Part II Chapter 6 Section 6 - Linear wave theory 235
6.6 LINEAR WAVE THEORY
Linear wave theory
By G. Moe,
NTNU, Trondheim, Norway.
Contents
6.6.1 Linear Wave Theory
6.6.2 Wave Forces
6.6.2.1 Introduction
6.6.3. Potential Theory
6.6.3.1 In General
6.6.3.2 Potential Theory for a Cylinder in a Steady Current
6.6.3.3 Potential Theory for a Cylinder in Oscillating Flow (/D >5)
6.6.3.4 Potential Theory for an Oscillating Cylinder in Still Water
6.6.4 Empirical Results for Forces in a Viscous Fluid
6.6.4.1 Flow Separation past a Stationary Cylinder in a Steady Flow
6.6.5 Flow Separation past a Stationary Cylinder in an Oscillatory Flow: Morison's Formula
6.6.6 Which Formula to Use to Find the Wave Forces?
6.6.7 Effective Axial Tension
6.6.8 References
Part II Chapter 6 Section 6 - Linear wave theory 236
6.6.1 Linear Wave Theory
The profile, dynamic pressure and particle velocities and accelerations in a regular, harmonic wave is
summarised in Table 6.23. Please note that the waves are propagating in the direction of the positive
x-axis. It should also be noted that the phase above is arbitrary, thus a phase angle of
0
could be
added in all expressions for =t-kx above. For instance, if
0
=/2, then and sin(+/2)=cos.
Hence, in the expressions above, the potential, vertical velocity etc. may instead be expressed through
-sin(t-kx)) and the wave profile, horizontal velocity, etc. through cos(t-kx). Complex notation in
which the harmonic functions are expressed through real or imaginary parts of exp(t-kx) may also be
used.
Table 6.23. The profile, dynamic pressure, particle velocities and accelerations in a regular, harmonic
wave.
6.6.1.1.1 Linear Theory of Regular Waves Review
Wave property
SHALLOW WATER
(d / < 1 / 20)
INTERMEDIATE WATER
(1 / 20 < d / < 1 / 2)
DEEP WATER
(d / > 1 / 2)
Velocity potential
(u = )
=
ag k(z + d)
kd
( t - kx)
cosh
cosh
cos
=
ag k(z + d)
kd
( t - kx)
cosh
cosh
cos
=
ag
e t kx
kz
cos( )
Dispersion relation
2 2
= g k d
2
= gk kd tanh
2
= gk
Wavelength - wave
period relation
= T gd
=
g
2
T
2 d
2
tanh
=
g
2
T ( 1.56 T )
2 2
Waveprofile = a ( t - kx) sin = a ( t - kx) sin = a ( t - kx) sin
Dynamic pressure
d
p = ga ( t - kx) sin
d
p = ga
k(z + d)
kd
( t - kx)
cosh
cosh
sin p ga e t kx
d
kz
= sin( )
Horizontal
particlevelocity
u =
a
kd
( t - kx)
sin u = a
k(z + d)
kd
( t - kx)
cosh
sinh
sin
u ae t kx
kz
= sin( )
Vertical
particlevelocity
w = a
z + d
d
( t - kx) cos w = a
k(z + d)
kd
( t - kx)
sinh
sinh
cos
w ae t kx
kz
= cos( )
Horizontal
particleacceleration
cos u =
a
kd
( t - kx)
2
cosh
sinh
cos u = a
k(z + d)
kd
( t - kx)
2
cos( ) u a e t kx
kz
=
2
Vertical
particleacceleration
sin w = - a
z + d
d
( t - kx)
2
sinh
sinh
sin w = - a
k(z + d)
kd
( t - kx)
2
sin( ) w a e t kx
kz
=
2
Group velocity c c
g
= c c
kd
kd
g
= +
1
2
1
2
2
(
sinh
) c c
g
=
1
2
=2 / T, k = 2 /
T =waveperiod
=wavelength
a =waveamplitude
g =acceleration of gravity
c = / T =phasespeed
t =time
x =direction of propagation
z =vertical co-ordinate
positiveupward, origin
at still water level
d =water depth
pd =dynamic pressure
d o
p - gz + p = total pressurein
thewater ( -gz =hydrostatic pressure,
o
p =atmospheric pressure).
E = g a
1
2
2
=waveenergy (per unit
surfacearea)
P Ec
g
= =waveenergy flux (per unit
width along thewavecrest)
Part II Chapter 6 Section 6 - Linear wave theory 237
6.6.2 Wave Forces
6.6.2.1 Introduction
Offshore structures in the Arctic may be exposed to various kinds of loads, such as gravity and
hydrostatic pressure, and environmental loads caused by waves, currents, wind, ice and snow and
finally some accidental loads such as e.g. earthquake, collision (ship and aircraft) or fire. We will in
this part of the course limit ourselves to forces caused by waves and currents. For most offshore
structures, apart from ice loads, these will constitute the most important part of the total loading.
When water moves relatively to a submerged body there will be created forces on the body. These
may be of several types. Some of those may be simple to envision and analyse, but others may be
more elusive and any analysis may have to be based on results from experiments.
It is obvious that even the sharpest thinkers have had problems understanding the phenomena that
takes place in hydrodynamics. One of the first who made an effort here, Leonardo da Vinci, wrote
"Remember, when discoursing about water, to induce first experience, then reason". Let us follow this
advice and take as a starting-point, Fig. 6.26 showing a cylinder in water that suddenly is exposed to a
steady flow velocity u
o
.
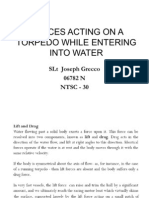
In the first picture (a) we see a flow which is nearly symmetric on the upstream and downstream side.
After a while one can see some small vortices on the downstream side which afterwards grow (picture
a, b, c, d). In picture (e) the vortices have become so large that they may soon be torn loose from the
cylinder, and the last picture shows the situation where the steady flow has acted for a long time, so
that many vortices have been created.
The experiment clearly shows that the flow pattern not only depends on the flow velocity, which is
the same in all pictures. It is obvious that a flow situation is built up over time. To start with, picture
(a), the flow pattern is very similar to the one occurring for an ideal fluid (potential theory). As time
passes, other phenomena turn up and at last we have a pattern where vortices are formed, growing and
alternately loosening from the upper and the lower side of the cylinder. When a vortex sheds a
transversal force and a fluctuation in the longitudinal force will result. Thus we get a time dependent
force even though the flow does not vary with time. So it is obvious that the force on the body does
not only depend on the instantaneous value of the flow velocity, but that also the "flow history" will
have an influence.
Part II Chapter 6 Section 6 - Linear wave theory 238
Fig. 6.26. Stages in the development of flow (from left to right) past a circular cylinder from the rest.
The speed of the stream has been increased rapidly and then kept constant (Prandtl, 1925).
"Vortex formation" is a common term used to denote what is seen in pictures (a) to (e) and the same
process takes place in (f) while vortex shedding is used about vortices which are torn loose from the
cylinder. The longitudinal force is often termed "drag force".
In basic courses we mostly consider an ideal fluid, that is forces due to viscosity (shear stresses) have
been neglected in comparison with normal stresses which, being equal in all directions, are known as
the pressure of the fluid.
If the fluid also is irrotational, such problems may be solved as a potential problem =
2
0 . This is
the so-called Laplace equation. Irrotational means that infinitesimal elements will not rotate relatively
to for example their own centre of gravity (however, each centre of gravity may move in a circle). An
ideal fluid does not have any shear stresses that can give a fluid particle rotation.
Very often we find good results for the forces acting on a body by means of potential theory, but at
other times this method is completely insufficient. One of the problems with potential theory is that it
is likely to give high velocities at the surface of the body. But at the surface the velocity must be 0 as
a result of adhesion between water molecules and fixed bodies. In many cases it is possible to get a
Part II Chapter 6 Section 6 - Linear wave theory 239
correct solution by using a more accurate theory having a thin boundary layer close to the body which
includes viscosity. Outside this layer potential theory is used. Within the boundary the velocities of
the shear deformation are so large that the shear forces are significant even though the viscosity (i.e.
the shear module) is small. This procedure gives good solutions for stream-lined bodies such as ships
and aeroplanes.
If the cross sections are not streamlined, an additional problem will appear, so-called "separation".
This means that the fast flow along the body surface separates from the surface at a so-called "point of
separation". Behind the body there will then be a region with water motion, a so-called "wake" (see
Fig. 6.27). The same phenomenon is shown in Fig. 6.25f. Do also note from Fig. 6.26 that it will take
time before separation is developed. If the flow reveres itself before separation has time to develop,
then solutions based on potential theory plus a boundary layer will be approximately correct.
P
P'
A
Fig. 6.27. Flow around a circular cylinder.
Such phenomena that cannot be described by the theory of ideal fluid are denoted "viscous". For
instance, cases where the internal friction in the fluid viscosity is of significance. For bodies with non-
streamlined area, the direct frictional forces from the fluid action on the surface of the cylinder most
often will give a less important contribution to the viscous force. Such friction forces are present in all
flow situations in Fig. 6.26, also (a), while the largest "viscous contribution" to the longitudinal force
in (f) almost exclusively is due to pressure forces, not shear forces. This applies to all ordinary cases
of engineering interest, but not if the cylinder is very small (hair, straw of grass, etc.).
By using the Bernoulli equation for the flow following the surface from A to P, one will see that the
pressure will be largest where the velocity is 0 and lowest at P where the velocity is largest. All
around the rear side of the cylinder the pressure will be approximately as at P and hence low. This
follows from the balance of the pressure over the layer of separation. As a result of this the cylinder is
exposed to a resultant caused by differences in pressure around the cylinder. This force is often
termed "form drag". Often the transversal forces are termed "lift forces" since they are similar to the
forces lifting the wing of an aeroplane, both being directed transversal to the flow direction. Note that
the lift force on a wing of an aeroplane always is directed towards one side, while the transversal force
on a cylinder alternates in direction, depending on whether the vortex shedding is on the upper and
lower side.
In Marine Technology we rarely consider streamlined bodies, and therefore it is not so often the effect
from the boundary layer has that much importance. The question is then whether the flow is separated
or not. As explained earlier, this depends on how fast the flow changes, and we will later see that with
waves with a given velocity, amplitude and period, the separation will take place for bodies having
Part II Chapter 6 Section 6 - Linear wave theory 240
the smallest cross-sections. Therefore cross-sections where the forces in waves can be derived from
potential theory, are customary denoted "large volume structures". It must strongly be emphasised that
there are other decisive factors besides the size of the body. But the expression "large volume
structures" is well established and will be used also in this text to denote cases for which the wave
forces can be found from potential theory.
6.6.3 Potential Theory
6.6.3.1 In General
An ideal fluid is incompressible and irrotational. Incompressible means that
u
x
v
y
w
z
+ + = 0 (6.5)
This can easily be realised by considering a small rectangular control surface not obstructing the fluid
motion and then regard the flow in the three directions. In the x-direction the flow into the control
volume per unit time will be udydz and out [ ]dydz dx x u u ) / ( + . The net flux is then
( / ) u x dxdydz for flow in the direction of the x-axis. Furthermore, by regarding all the three
directions and dividing by dx dy dx, we obtain Eq. (6.5). This is also shown in most basic textbooks in
hydromechanics.
y (v)
x (u)
u/y
v/x
Fig. 6.28. Rotation of the sides of a fluid element in the xy-plane.
Part II Chapter 6 Section 6 - Linear wave theory 241
According to Fig. 6.28, the mean value of the rotations about the z-axis in the point (x, y, z) will be
1 2 / ( / / ) v x u y . No mean rotation about any of the axes then implies
u y v x / / = 0 (6.6a)
v z w y / / = 0 (6.6b)
w x u z / / = 0 (6.6c)
The above represents only 2 independent equations. (E.g. by elimination of v from (6.6a) and (6.6b)
one obtains /y of (6.6c).) Real fluids will very often be irrotational because pressure forces will not
rotate fluid elements, and shear forces tend to be insignificant except at fluid boundaries. Then an
analytic solution can be found by use of a potential chosen as follows
= / x u (6.7a)
= / y v (6.7b)
= / z w (6.7c)
Now Eq. (6.6) will automatically be satisfied, and what remains is to substitute Eq. (6.7) into Eq.
(6.5). This gives
2
2
2
2
2
2
2
0
x y z
+ + = = (6.8)
This equation is called the Laplace equation. Since Eq. (6.8) is based on Eq. (6.7), which introduced a
potential , we often say that the use of Eq. (6.8) implies solutions with the help of potential theory.
Note that the velocity in an arbitrary directions n is given by /n. For a known potential flow, will
namely have given values throughout the space. If then a new co-ordinate system (, t, s) is
introduced, will not change. But then according to the definition of the potential Eq. (6.7), the
velocities in the three directions are given by /n, /t, /s.
Many nice mathematical techniques to solve Laplace equation have been established. However, in this
compendium we shall only consider those which are most urgently needed. Often we will just present
the solution and show that it is correct.
Problem formulation
The solution for a fixed body in a given, external flow
o
is usually taken as a sum of
o
and a
diffraction potential
1
, i.e. =
o
+
1
. Then the solution (assuming incompressible, irrotational,
inviscid fluid) must satisfy three following 3 requirements:
Laplace-equation
2
=0 must be satisfied throughout the fluid.
Part II Chapter 6 Section 6 - Linear wave theory 242
The normal component of the particle velocity on the surface of the body (S
B
) must be zero, /n
=0.
The velocity potential far from the body must approach the incoming (undisturbed) potential
o
.
6.6.3.2 Potential Theory for a Cylinder in a Steady Current
The incoming potential for a steady current flowing in the positive x-direction with velocity U
becomes, see Fig. 6.27:
o
Ux Ur = = cos (6.9)
The description using polar co-ordinates is suitable for cylindrical bodies since the boundary
conditions are then more simple to handle.
To satisfy the conditions above there must be added a diffraction potential. For a fixed cylinder with
its longitudinal axis normal to the current, this potential will be:
1
2
= U R r ( / )cos (6.10)
And thus the total potential becomes:
=
o
+
1
This potential satisfies the conditions given above:
In order to show that the Laplace-equation now is satisfied, we may use the formula for polar co-
ordinates:
2
2
2
2
1 1
r r
r
r r
+
=
The velocity component normal to the surface:
U
r
r
= =
0
It may easily be shown that
o
when r .
Part II Chapter 6 Section 6 - Linear wave theory 243
The velocity component tangential to the surface will be:
y
v
u
x
R
r
u
r
Dipole
-2 U sin
y
y
x x
Fig. 6.29. Co-ordinate system, flow patterns and velocity at the cylinder surface.
Fig.6.29 shows that the x-component of u
always will be directed in positive x-direction - as
expected. The forces on the circular body at r =R can easily be determined by integrating the x-
component of the pressure.
Actually, we see at once that the current is (double) symmetric since the magnitude of the velocities at
and - are equal. The pressures at and - are equal and the total force on the body will be 0.
This result is known as d'Alambert's paradox.
According to what is said in Chapter 6.6.2, we realise that the assumption on which this result is based
is that the effect both from viscosity and separation can be neglected. When separation occurs the
pressure distribution along the rear side of the cylinder is totally different, as suggested in Section
6.6.2.1. On the other hand, if the velocity is so small that there will not be any separation, then
viscosity will be of paramount importance. The present solution, having neglected friction, will
therefore be completely useless. On the other hand, a very similar solution for an oscillating flow case
(waves) will be quite useful.
6.6.3.3 Potential Theory for a Cylinder in Oscillating Flow (/D > 5)
A vertical cylinder in waves is shown in Fig. 6.30. The force per unit length of the cylinder shall be
calculated. It is assumed that the pile diameter is small compared to the wave length . At first we will
consider the force which occurs in an undisturbed wave, a so-called Froude-Krylof-force. In reality
the pile will change the flow patterns around it, so the Froude-Krylof-force must only be considered
as a first estimate.
This force may be determined by integrating the ent of the pressure around the surface of the cylinder,
but we shall manage without recourse to a formal integration. Consider a fluid element limited by the
same cylindrical surface. It may then be seen that the horizontal force on the surface of the fluid
element must be large enough to give it a horizontal acceleration ( ) u z as given in Table 6.23.
Its mass is D
2
4 / . Thus, according to Newton's 2. Law, the total force on the fluid element will be:
Part II Chapter 6 Section 6 - Linear wave theory 244
f D u
FK
=
2
4 /
e j
(6.11)
Of course both f
FK
and u are functions of z while x may be chosen freely without any loss of
generality, e.g. x =0. Assuming the flow pattern for an undisturbed wave around the cylindrical pile,
it will therefore be exposed to the same force as the fluid-element of identical shape.
We shall now find a more accurate solution where the influence on the flow pattern from the pile is
included. The undisturbed wave potential is according to Table 6.23:
o o
o
a
g t kx
g
g k z d
kd
=
=
+
cos
cosh ( )
cosh
b g
(6.12)
The horizontal co-ordinate x occurs in the argument to the cosine function only, and with kx <<1, this
leads to coskx 1, sinkx kx =kr cos, so that Eq. (6.12) may be written:
o o
g t t kr = + cos sin cos l q (6.13)
In the steady flow case the undisturbed wave potential was equal to Ur cos. In this case, with a small
cylinder in an oscillating flow given by Eq. (6.13) the r, -dependency will be just the same. (In
addition we have obtained a contribution which is constant in r and ).
Remembering that the calculation of
2
and the velocities only involves derivation with respect to r
and , it is seen that the constant will not contribute to
2
. Then in analogy to the steady flow case
Eq. (6.9), a total potential =
o
+
1
may then be postulated.
= + +
F
H
G
I
K
J
R
S
T
U
V
W
g t t k r
R
r
o
cos sin cos
2
(6.14)
Similar to the steady flow case
2
=0 will be satisfied throughout the fluid while u
r
=/r =0 on
the cylinder surface. Finally, the part which is added compared to the undisturbed wave,
g
o
sintk (R
2
/r)cos, will be negligible for large r.
The dynamic pressure at the surface of the cylinder becomes:
p
t
g t t kR
D o
= = +
sin cos cos 2 l q (6.15)
The x-component of the force per unit length of the cylinder may now be determined by integration,
see Fig. 6.29.
Part II Chapter 6 Section 6 - Linear wave theory 245
f p Rd
D
o
=
z
2
cos (6.16)
By putting Eq. (6.15) into Eq. (6.16) we will have a component with cos and another with cos
2
.
The first integrates to 0 may be disregarded. Then we have:
f g t kR d
R k g t R u
x
=
= =
z
=
0
2 2
0
2
2
0
2
0
2
2 2
cos cos
cos
(6.17)
y
x
d
D
z
x
F P
d
cos q
P
d
q
Fig. 6.30. Vertical cylinder in waves.
This result is exactly the double of that obtained from an undisturbed wave Eq. (6.11). The result is
applicable to potential flow and for a cylinder that is small compared to the wave length. It turns out
that /D >5 is sufficient. However, if D becomes very small the fluid particles may in many cases
move many diameters during each half oscillation, and separation will take place. Then, the potential
solution does not apply any more. We shall return to this later on.
From (6.14) is found
u
r
kg k z d
kd
t
R
r
u
r
kg k z d
kd
t
R
r
r
a
a
=
=
+
=
=
+
+
cosh ( )
cosh
sin { }cos
cosh ( )
cosh
sin { }sin
1
1
1
2
2
2
2
(6.14b)
(6.14c)
6.6.3.4 Potential Theory for an Oscillating Cylinder in Still Water
Part II Chapter 6 Section 6 - Linear wave theory 246
A long, horizontal cylinder oscillates in still water with frequency and velocity amplitude U
o
. The
momentary velocity is U
o
cos t. We have earlier considered an oscillating flow around a fixed
cylinder, and this is a closely related case. The potential for the cylinder now becomes
( )
2
1 0
cos cos U R r t = (6.18)
when using cylindrical co-ordinates. As a matter of fact, in analogy with Eq. (6.6) for a fixed cylinder,
1
will satisfy Laplace equation, and the velocity normal to the surface of the cylinder will be
u
r
U t
r r R r R o
| | cos cos
= =
= =
1
(6.19)
It is immediately seen that for =0 and , we have the wanted translational velocity. Furthermore, at
a general point on the periphery the fluid velocity must be equal to the velocity component in the
direction normal to the surface. This becomes (U
o
cos t) cos (x, n) and since the angle between the x-
axis and the normal n is we can see that Eq. (6.19) is correct.
y
x
q
t
n
uq
ur
Velocity
U
0
cos wt
Fig. 6.31. Cylinder which oscillates with axis normal to the flow direction.
From potential theory, the tangential fluid particle velocity close to the surface of the cylinder
becomes
u
r
U t
r R r R o
| | sin cos
= =
1
1
(6.20)
This is the velocity at the outer edge of the boundary layer. We also need the tangential velocity of the
body which is given by
U t x t U t
o o
(cos )cos( , ) sin cos = (6.21)
since the angle between the x-axis and the tangent is (/2 +).
The dynamic pressure on the surface of the cylinder may now be determined
p
t
U R t
D o
= =
1
sin cos (6.22)
Part II Chapter 6 Section 6 - Linear wave theory 247
By substituting Eq. (6.16) into Eq. (6.22), we obtain:
f L U R L t R UL
h o
= =
2 2
sin
(6.23)
where we have used
U , the translational acceleration of the centre of the body, equal to (-U
o
sin t)
and multiplied by the body length L (neglecting end effects).
Then this represents an external force from the fluid, which resists the motion of the cylinder, and is
proportional to the displaced mass of fluid times acceleration. If the body has a mass M and is
exposed to a mechanical force F
m
that makes it oscillate (in addition to the force from the fluid f
h
L)
one may write Newton's second law on the following form
MU F f L
m h
= (6.24)
or with the use of Eq. (6.23) when assuming that total hydrodynamical force F
h
=f
n
L where L is the
length of the cylinder,
M R L U F
M
+ =
2
e j
(6.25)
Therefore, when dealing with hydrodynamical forces from potential theory in infinite fluid we often
include an "added mass" which for the circular cylinder turned out to be the mass of the quantity of
water displaced by the cylinder.
6.6.4 Empirical Results for Forces in a Viscous Fluid
6.6.4.1 Flow Separation past a Stationary Cylinder in a Steady Flow
Overview - dimensional analysis
Consider the case shown in Section 6.6.1, Fig. 6.26, picture (f), dealing with a circular cylinder, a
"pile". As mentioned, the drag forces on a pile in steady current have two main contributions, namely
friction forces against the surface of the pile and form drag, caused by pressure differences. A pure
case of frictional drag will come about if a thin long plate is set parallel to a steady current, while on
the other hand pure form drag arises if the plate is put at a right angle to the current.
Part II Chapter 6 Section 6 - Linear wave theory 248
For circular cylinders, in cases of engineering interest, only the form drag will normally be of interest,
and we have that the drag force per unit length of the cylinder, f
d
, is
f C DU U
d d
=
1
2
(6.26)
Here are:
U - velocity of the water particles at right angles to the pile
D - the diameter of the pile
- density of water
C
d
- dimensionless drag-coefficient
The absolute value sign is included to ensure that the force on the cylinder has the same direction as
the velocity of the particles. Often U
2
is written instead of UU . In that case we have to make sure that
the direction of the positive force is defined in the direction of the current. Many reports consider, by
the way, force on an element with infinitesimal length dl, along the axis of the cylinder. We will then
obtain the force df
d
and the right side has to be multiplied with dl:
df C DU U dl
d d
=
1
2
This expression is equivalent to the first one, and we will in this text prefer force per unit length, that
is Eq. (6.25).
The drag coefficient will now depend on the Reynolds number Re, defined as
Re / = UD (6.27)
with being the kinematic viscosity of the fluid. Besides, the roughness of the cylinder and the
turbulence level of the incoming current play a part. Loosely speaking, we may put these two together
to one equivalent average roughness k, writing
C C k D
d d
= (Re, / ) (6.28)
It will now be explained why C
d
is dependent on just 2 dimensionless groups. By means of so-called
dimensional analysis, it can be shown that if the force depends on m independent variables and there
are r independent fundamental physical dimensions involved in the problem, then the dimensionless
force will be a function of (m-r) other dimensionless groups.
We assumed that the drag force, f
d
, was dependent on the diameter D and the average roughness k,
current velocity u, the density of the fluid and the kinematic viscosity of the cylinder. The
problem thus involves the drag force f
d
and 5 other physical variables, i.e., m =5.
f f D k U
d
= ( , , , , )
Part II Chapter 6 Section 6 - Linear wave theory 249
Further, there are 3 independent dimensions in the problem. For instance length, time and force, that
is r =3. The dimensionless force
C
f
DUU
d
d
=
1
2
is only dependent on m-r =2 independent dimensionless groups, and a possible choice is stated in Eq.
(6.28), where the Reynolds number Re and relative roughness k/D are used. Of course, it is possible to
form other dimensionless groups than these e.g., the products (Re k/D) and (Re D/k), and as long as
we form 2 independent dimensionless groups, these can be chosen freely. But certain choices of non-
dimensional groups may better display the functional relationships than other choices, and may
therefore be preferred by nearly everybody.
So far we have concentrated on circular cylinders in a steady current, but corresponding expressions
can easily be formulated for other bodies. Generalising Eq. (6.25), the drag force at the body may be
written
F C A U U
d d
=
1
2
The symbols are the same as in Eq. (6.25) except for A which stands for the projection of the body on
a plane that is perpendicular to the current and F
D
which indicates the total force, not the force per
unit length.
Flow characteristics
The incompressible viscous flow about a circular cylinder is a complicated function of Reynolds
number (Re).
Re / = UD (6.29)
here D- diameter of the cylinder
- kinematic viscosity of fluid
U- free stream velocity, unaffected by the cylinder, often denoted U
The flow is also sensitive to cylinder roughness and free-stream turbulence. In the absence of these
effects, the main flow regions around a circular cylinder described in terms of the Reynolds number
are shown in Fig. 6.32. Flows for Re <150 are of minor interest for offshore applications. We still
note in passing that for Re <5, the Navier Stokes equation can be solved analytically by neglecting
the inertia terms and allowing the viscous terms to dominate. Please consult Fig. 6.32 for other cases.
At a Reynolds number of almost 150, the far wake starts to become turbulent. At still higher Reynolds
numbers, the point of transition from laminar wake to turbulence moves upstream. At a Reynolds
number of about 300, the entire vortex street is turbulent, though the flow on the cylinder is laminar.
Throughout the subcritical region (300 <Re <210
5
) the flow conditions are very stable. At a
Reynolds number around 210
5
, the point of transition to turbulence in the separated free shear layers
moves upstream. When it is very close to the cylinder surface, the laminar separation points move
back (upstream) slightly and, with a further slight increase in Reynolds number, a separation bubble is
formed, Fig. 6.33.
Part II Chapter 6 Section 6 - Linear wave theory 250
Fig. 6.32. Regions of fluid flow across circular cylinders (Lienhard, 1966).
Fig. 6.33. Formation of separation bubble at critical Reynolds numbers.
Turbulent flow is now established along the surface of the cylinder behind the bubble, and the vortex
street becomes quite irregular. The wake width decreases. This is called the critical flow region (210
5
<Re <710
5
). Above the critical region, the laminar separation bubble decreases with increasing
Reynolds numbers, and the wake begins to widen. This is the supercritical flow region where the
shedding is not regularly periodic (0.710
6
<Re <3.510
6
). Regular shedding occurs again at Re >
3.510
6
, with a fully turbulent wake, turbulent separation and the entire boundary layer having become
turbulent ahead of separation. As the separation point moves upstream, the bubble disappears and the
wake is widened. When this is fully developed, we are in the hypercritical, transcritical or post-
Part II Chapter 6 Section 6 - Linear wave theory 251
supercritical flow region. At even higher Reynolds number little is known of what is happening, but it
is unlikely that any dramatic change will occur in the flow patterns.
The drag and lift coefficient and the Strouhal number
When fluid is flowing about a cylinder forces are induced on the cylinder. The fluid dynamic forces
may be divided into the time averaged and fluctuating forces along and across the direction of the
flow. The transversal forces are often called lift forces, while in-line forces are denoted drag forces.
As discussed earlier the flow about a cylinder is a function of Reynolds number, and consequently so
are the fluid forces. The steady in-line force normalised with respect to 1 2
2
/ U DL is called the
drag coefficient (C
d
). The drag coefficient is shown in Fig. 6.34.
Fig. 6.34. Drag coefficient for circular cylinders as a function of Reynolds number (Sarpkaya and
Isaacson, 1981).
Another parameter which characterises the flow conditions and hence the fluid forces is the vortex
shedding frequency. Strouhal as early as in 1878 discovered a relationship between the vortex
shedding frequency, cylinder diameter, and velocity of the ambient flow. The relationship, denoted by
S
f D
U
o
o
= (6.30)
is known as the Strouhal number, where f
o
is the vortex shedding frequency i.e. the number of vortex
pairs per second. In Fig. 6.35 the Strouhal number is shown as a function of Reynolds number.
As observed from Figs. 6.34 and 6.35 a similar behaviour is observed both for the C
d
and 1/S
o
throughout the Reynolds number range. In the subcritical region the flow conditions are very stable,
and so are the values of C
d
and S
o
, approximately 1.1 and 0.2, respectively.
Part II Chapter 6 Section 6 - Linear wave theory 252
Fig. 6.35. Strouhal number versus Reynolds number for a smooth cylinder (Sarpkaya and Isaacson,
1981).
In the critical region, with the laminar separation, the formation of the separation bubble, the
reattachment and a new turbulent separation followed by a narrowing of the vortex street, the drag
decreases, and the vortex shedding covers a broad band of frequencies. A high value of S
o
is obtained
if the most dominant frequency in the spectrum is taken as the Strouhal frequency.
In the supercritical region the turbulent separation point moves upstream, and the wake becomes
broader. This in turn leads to a continuous increase in the drag coefficient. The vortex shedding still
covers a broad band of frequencies, and the wake is highly turbulent.
In the hypercritical region the entire boundary layer is turbulent, the vortex wake has broadened and
the C
d
-value reaches a constant value of approximately 0.6-0.8. The vortex shedding again becomes
periodic, and the Strouhal number is approximately 0.24-0.30. At higher Reynolds numbers it is
believed that no dramatic change in the C
d
and S
o
-values will happen.
The alternate shedding of vortices from a cylinder in a flow produces unsteady forces with alternating
directions on the cylinder at the vortex shedding frequency in the transversal direction, and at twice
this frequency in the in-line direction (parallel to the flow). A number of investigations have been
directed towards determining the magnitudes of the coefficients associated with these forces. There is
considerable spread in the results, partly due to the fact that the forces are very dependent on the
correlation length of vortex shedding, which is again dependent upon end effects, cylinder length,
free-stream turbulence, any shear in the flow, and above all whether any slight motion of the pile can
take place, in response to the vortex shedding.
These coefficients are made non-dimensional in the same way as the drag force and are termed C
L
and
C'
d
for the unsteady lift and drag, respectively. For Re =10
4
10
5
, C
L
is an order of magnitude greater
than C'
d
(C
L
0.6 - 1.2).
Part II Chapter 6 Section 6 - Linear wave theory 253
6.6.5 Flow Separation past a Stationary Cylinder in an Oscillatory Flow: Morison's
Formula
Going back to the example in the beginning of this Section, namely a cylinder in an impulsively
started, steady flow, Fig. 6.26, it is recalled that one of the key observations was that "vortex
formation takes time". In the first pictures there was small deviations form a flow pattern in which
there was perfect symmetry between the upstream and downstream side of the cylinder. Then
gradually, as time passed, the boundary layer rolled up into vortices, and the vortices were eventually
shed, creating a "wake".
For cylinders in waves the situation is similar. Now the question is whether vortices can be formed
and shed before the flow reverses itself. If no vortices are formed, then the solution can to a good
approximation, be represented by potential theory. If a very large number of vortices are formed per
half cycle of the flow, then the problem can to a good approximation be assumed to be quasi-steady,
i.e., it may be considered as a case of several successive steady flow situations.
Between these two limiting cases is the complicated situation for which Morison's formula applies.
Morison et al. suggested that for the wave case, where there is both acceleration and flow separation,
the total force could be written as the sum of a drag term and an acceleration term. They thus
suggested that the following empirical formula, now known as "Morison's formula", could be used
f D C U D C UU
m d
= +
1
4
1
2
2
(6.31)
in which as before f is the fluid force per unit length of the cylinder. This formula has been used in
virtually all investigations since then.
NOTE: It is very unfortunate that Morison et al. chose the same names on the coefficients C
m
and C
d
as those used for the limiting situations (i.e. the unseparated flow case and steady flow case,
respectively).
It has earlier been explained that the drag coefficient in steady flow depends on D,K,U,,, so that
two non-dimensional numbers (Re, k/D) could be formed. The behaviour in oscillatory flow will in
addition depend on the wave period T, and therefore an additional non-dimensional parameter must be
introduced. This is customarily the Keulegan-Carpenter number K, defined as
K
U T
D
m
= (6.32)
in which U
m
is the amplitude of the oscillatory flow. Also the oscillatory Reynolds number
Re=
U D
m
(6.33)
will be used. The coefficients in the Morison formula (6.31) depends on the following 3 parameters:
Part II Chapter 6 Section 6 - Linear wave theory 254
C C K k D
d d
= (Re, , / ) (6.34)
C C K k D
m m
= (Re, , / ) (6.35)
One has a choice of non-dimensional numbers. Sarpkaya often uses (Re, , k/D) instead of
(Re, K, k/D) in which is a frequency parameter defined as
= =
Re
K
D
T
2
(6.36)
Experimental results on C
d
and C
m
for smooth cylinders in oscillatory flows
Sarpkaya conducted a series of experiments with smooth cylinders in oscillatory flows. From these
experiments the drag and inertia coefficients were calculated.
These data are shown as a function of Re for constant values of K in Fig. 6.35. It is seen that C
d
decreases with increasing Re to a value of about 0.5 (depending on K) and then gradually rises to a
constant value (hypercritical value) within the range of Reynolds numbers encountered.
The inertia coefficient increases with increasing Re, reaches a maximum, and then gradually
approaches a value of about 1.85. The smallest K-values exhibit decreasing C
d
values and C
m
approaching 2.0.
Fig. 6.36. C
d
versus Reynolds number for various values of K (Sarpkaya and Isaacson, 1981).
Part II Chapter 6 Section 6 - Linear wave theory 255
Fig. 6.37. C
m
versus Reynolds number for various values of K (Sapkaya and Isaacson, 1981).
From Fig 6.36 can be seen that the drag coefficient for a cylinder in harmonically oscillating flow is
larger than that for the steady flow case at subcritical Reynolds number (say, for Re smaller than
about 20 000) and again at critical Reynolds numbers (say larger than about 400 000). In the range of
Reynolds numbers between the two values cited above, the drag coefficient for the oscillating flow is
considerably lower than that for steady flow. The reason for this is the earlier transition to turbulence
in the boundary layers, i.e. critical flow conditions are reached earlier in oscillatory flows.
Roughness effects on C
d
and C
m
in harmonic flow
It is a fact that structures in the marine environment become gradually covered with rigid as well as
soft marine growth. Thus, the fluid loading and the structural response due to identical ambient flow
conditions may be significantly different from that experienced when the structure was clean. This is
primarily because of the roughness effect on the excrescences on the flow (the boundary layer) and
the secondary because of the increase of the effective diameter.
For rough cylinders often it is more relevant to consider the flow around the roughness elements of
size k and use it as a basis for a Roughness Reynolds number
Re
k
m
U k
=
(6.37)
Part II Chapter 6 Section 6 - Linear wave theory 256
Figs. 6.38 and 6.39 show curves for recommended values of C
d
and C
m
for rough cylinders.
Fig. 6.38. Recommended drag and inertia coefficients for rough cylinders, K =20 (Sarpkaya and
Isaacson, 1981).
Fig. 6.39. Recommended drag and inertia coefficients for rough cylinders, K =100 (Sarpkaya and
Isaacson, 1981).
Part II Chapter 6 Section 6 - Linear wave theory 257
6.6.6 Which Formula to Use to Find the Wave Forces
Fig. 6.40 shows how to decide whether the flow is separated or whether potential theory can be
applied. For the latter case the mass coefficient C
m
is 2 if the diameter is less than 0.2 times the
wavelength. Otherwise C
m
may be determined from Fig. 6.41.
Wave force,
cylinder
K>2?
Morison formula
Eq. (6.31)
Potential theory
Smooth D/L<0.2
C
m
, see
Fig. 6.41
C
m
=2
Figs. 6.36
and 6.37
Figs. 6.38
and 6.39
No Yes, separation
No Yes No Yes
Fig. 6.40. Wave force on a vertical cylinder.
Fig. 6.41. Inertia coefficient C
m
in unseparated flow as a function of diameter to wave length,
potential theory.
Part II Chapter 6 Section 6 - Linear wave theory 258
6.6.7 Effective Axial Tension
In the present section emphasis has been on hydrodynamic forces, i.e. forces associated with flowing
water. However the forces due to water at rest will often be the dominant external influences on a
structure in the ocean, and can therefore by no means be neglected, but it has been assumed herein
that this topic is known from earlier courses. In the present section an expose will be given of the
effect of hydrostatic pressure on a line-like body that undergoes deformations while being submerged
in still water. This topic is not covered in beginners courses in hydromechanics, and may yet be quite
important in many ocean engineering applications. The resultant of the water pressures acting at the
surface of a pipe of constant cross-section will change when the body shape changes, and this will
influence the behaviour of the structure. For instance e.g. the natural vibration frequency, and the
buckling load, will be modified.
(p
e
A
e
)
2
ds
p
w
ds
(p
e
A
e
)
1
g
e
A
e
ds
Fig. 6.42. Hydrostatic forces acting on a water element shaped as the pipe element.
The hydrostatic pressure against the riser wall can be replaced by equivalent contributions to the axial
force and the pipe weight as follows:
The effects of the fluid pressure on the exterior on a pipe element of length ds can be found by
considering the forces acting on a fluid element of the same shape, see Fig. 6.41. The resultant of the
force on the exterior surface of the fluid element is ( ) P ds
w
. This force, the hydrostatic forces at the
fluid element ends and the fluid element weight are in equilibrium, i.e. ( ) P ds
w
can be replaced by
( )
e e
A ds plus ( ) P A P A
e e e e 1 1 2 2
. (Positive directions are indicated in Fig. 6.42).
Consider now the riser element in water with (dry) weight per unit length equal to w, axial tension
T
w
in the pipe wall and subjected to the external pressure force ( ) P ds
w
. Using the above
replacements this situation is (statically) equivalent to the same cable element in air (i.e. without the
pressure force), but subjected to a wet weight w w g A
w e e
= and an adjusted, effective tension
T T P A
e w e e
= + . (T
e
is positive in tension, thus ( ) P A
e e
in Fig. 6.42 represents a positive addition
to T
w
).
Part II Chapter 6 Section 6 - Linear wave theory 259
The resultant pressure force against the internal surface of the pipe may in an analogous manner be
replaced by two axial forces, plus a weight term. This time the force on the interior wall of the pipe is
equal to the weight of the content ( )
i i
gA ds plus the axial compressive terms ( ) P A P A
i i i i 1 1 2 2
+ .
A situation with internal and external pressures and a pipe wall tension T
w
will then be statically
equivalent to a situation with no external and internal pressures, but with the following adjusted axial
tension and weight:
T T P A PA
e w e e i i
= + (6.38)
w w g A g A
w e e i i
= + (6.39)
T
e
is denoted effective tension or in many references tension while w
w
is called wet weight
and w is the riser weight per unit length in air. Here P
e
is the external hydrostatic pressure and P
i
is
the internal pressure in the pipe, and
e
and
i
are the densities of the external and internal fluids
respectively. T
w
is the axial tension force in the pipe wall. Actually Eq. (6.38) is quite general, and
permits gradual as well as sudden changes of the pipe cross section, and is valid regardless of the
inclination angle between the pipe axis and the vertical.
6.6.8 References
Lienhard, J . H. (1966): Synopsis of Lift, Drag and Vortex Trail Dynamics. Physics of Fluids, Vol. 31,
pp. 991-998.
Prandtl, L. (1925): ber die Ausgebildete Turbulenz. ZAMM 5:136. (See also Schlichting, H. (1955):
Boundary Layer Theory. Pergamon Press. Chapter XIX.
Sarpkaya, T. and M. Isaacson (1981): Mechanics of Wave Forces on Offshore Structures. Van
Nostrand Reinhold, New York, New York, 651 p.
You might also like
- Hydromechanics solutions guideDocument48 pagesHydromechanics solutions guideferdicakici880% (1)
- 5 Design of Steel Connections BoltsDocument16 pages5 Design of Steel Connections BoltsSimaoNo ratings yet
- TRANSPORTDocument25 pagesTRANSPORTABNERNo ratings yet
- Stiffnes and Damping in Mechanical DesignDocument514 pagesStiffnes and Damping in Mechanical Designczoobs100% (6)
- Waves: Unde, Valuri MareeDocument14 pagesWaves: Unde, Valuri MareeZenaida VoiculetNo ratings yet
- Target Man Hours Versus Time S CurveDocument2 pagesTarget Man Hours Versus Time S CurveRen SalazarNo ratings yet
- Great Waters - Business Track Record 2012-16Document16 pagesGreat Waters - Business Track Record 2012-16KK NairNo ratings yet
- Bulk Solids HandlingDocument303 pagesBulk Solids HandlingDr_M_Soliman100% (12)
- Three Moment EquationDocument34 pagesThree Moment EquationMohammad Naeem100% (1)
- Electrostatics: Electrostatics Electric Current ElectromagnetismDocument4 pagesElectrostatics: Electrostatics Electric Current ElectromagnetismBorisNo ratings yet
- FEMDocument20 pagesFEMVishal DhimanNo ratings yet
- Wave CalculationsDocument9 pagesWave CalculationsSunil ReddyNo ratings yet
- 325 UniPile Version 5 - User and Examples ManualDocument98 pages325 UniPile Version 5 - User and Examples ManualFernando SmithNo ratings yet
- Mining and ConstructionDocument32 pagesMining and ConstructionczoobsNo ratings yet
- 2 Wave Equations and Their SolutionDocument11 pages2 Wave Equations and Their SolutionPanagiotis StamatisNo ratings yet
- Offshore HydrodynamicsDocument44 pagesOffshore HydrodynamicsKtk ZadNo ratings yet
- Design of RCC ColumnsDocument8 pagesDesign of RCC Columnshitendra_gkNo ratings yet
- Coastal TerminologyDocument54 pagesCoastal TerminologyRam AravindNo ratings yet
- Problems (Solns)Document60 pagesProblems (Solns)reda redaNo ratings yet
- HEC-HMS Technical Reference Manual (CPD-74B)Document158 pagesHEC-HMS Technical Reference Manual (CPD-74B)sakeedfaheedNo ratings yet
- Chapter 4 PDFDocument48 pagesChapter 4 PDFmidju dugassaNo ratings yet
- As & A Level Further Mathematics 2014 SyllabusDocument30 pagesAs & A Level Further Mathematics 2014 SyllabusShawnNo ratings yet
- Brief Introduction To Continuum Mechanics (Deviatoric Stress and Strain)Document33 pagesBrief Introduction To Continuum Mechanics (Deviatoric Stress and Strain)masoodkamalNo ratings yet
- Sample For Solution Manual Sea Loads On Ships and Offshore Structures by FaltinsenDocument9 pagesSample For Solution Manual Sea Loads On Ships and Offshore Structures by Faltinsenmina starNo ratings yet
- Lecture Reading 13: Structural Analysis of Structural Steel BeamsDocument13 pagesLecture Reading 13: Structural Analysis of Structural Steel BeamsKim CalaguiNo ratings yet
- Design Report For Water Works Roads and DrainageDocument6 pagesDesign Report For Water Works Roads and DrainageTayyabah ZafarNo ratings yet
- Numerical Methods Root Finding TechniquesDocument146 pagesNumerical Methods Root Finding TechniquesBEENAYEK AdHIKARINo ratings yet
- Coastal Engineering Manual - Part IIIDocument477 pagesCoastal Engineering Manual - Part IIIAdrian CarreraNo ratings yet
- Limit State Design TheoryDocument3 pagesLimit State Design TheoryEvans KishNo ratings yet
- Chapter 3 PDFDocument8 pagesChapter 3 PDFShazreel AmirNo ratings yet
- Halim SirDocument133 pagesHalim SirMD Mazharul Islam BappyNo ratings yet
- RCC DesignDocument71 pagesRCC Designsirfmein100% (1)
- Consolidation NOTESDocument40 pagesConsolidation NOTESKarthi KeyanNo ratings yet
- Chapter 4Document36 pagesChapter 4Berihu GirmayNo ratings yet
- Consolidation ProcessDocument41 pagesConsolidation ProcessRehan HakroNo ratings yet
- Quizz SolutionDocument10 pagesQuizz SolutionPhuc SJNo ratings yet
- Gujarat Transformers PVT - Ltd. E-Mail Copy: As Per IS 1180 - Level-2Document5 pagesGujarat Transformers PVT - Ltd. E-Mail Copy: As Per IS 1180 - Level-2THANGAVEL PNo ratings yet
- Design For Steel Structures (Jackets)Document12 pagesDesign For Steel Structures (Jackets)Kathia Lorena Espinoza RojasNo ratings yet
- A Review of Pile Set-UpDocument20 pagesA Review of Pile Set-UpFernando SmithNo ratings yet
- Pile DesignDocument13 pagesPile DesignMohafisto SofistoNo ratings yet
- Torsion Mod1Document49 pagesTorsion Mod1Beveh G SupSupNo ratings yet
- Size and Topological Optimization of Cantilever BeamDocument6 pagesSize and Topological Optimization of Cantilever BeamseventhsensegroupNo ratings yet
- City University Department of Civil Engineering TDocument4 pagesCity University Department of Civil Engineering TanarNo ratings yet
- SeafemDocument87 pagesSeafemPriscila KImNo ratings yet
- Analysis of Rainfall Data LectureDocument15 pagesAnalysis of Rainfall Data LectureAmy AdamsNo ratings yet
- Features of Wrench Project Lifecycle Management SoftwareDocument3 pagesFeatures of Wrench Project Lifecycle Management Softwaremopw100% (1)
- Drag ForceDocument9 pagesDrag ForceImran BahaNo ratings yet
- Economic Viability of Simple Tidal Stream Energy PDFDocument73 pagesEconomic Viability of Simple Tidal Stream Energy PDFfatamorgganaNo ratings yet
- Torpedo ForcesDocument18 pagesTorpedo ForcesJoseph GreccoNo ratings yet
- Advanced Fluid MechanicsDocument15 pagesAdvanced Fluid MechanicsmmilyasNo ratings yet
- Sway and Roll Motion of A BuoyDocument18 pagesSway and Roll Motion of A BuoyRupesh KumarNo ratings yet
- Lect.12&13 ConsolidationDocument34 pagesLect.12&13 ConsolidationlkhdasouNo ratings yet
- BSC Thesis Title For Civil EngineeringDocument11 pagesBSC Thesis Title For Civil Engineeringbkxk6fzf100% (1)
- Safet Assessment & Fatigue Life Analysis Crane Structure PDFDocument5 pagesSafet Assessment & Fatigue Life Analysis Crane Structure PDFYadi KusmayadiNo ratings yet
- Rate of Consolidation Terzaghi'sDocument7 pagesRate of Consolidation Terzaghi'sLava SatNo ratings yet
- Phy113 Mechanics and Properties of Matter EsmDocument24 pagesPhy113 Mechanics and Properties of Matter Esmhenri testNo ratings yet
- 3A1Slids PDFDocument216 pages3A1Slids PDFqays kadhimNo ratings yet
- Unfilled Lecture NotesDocument96 pagesUnfilled Lecture Notesönder SönmezNo ratings yet
- Properties of FluidsDocument11 pagesProperties of FluidsBala ChandarNo ratings yet
- Fluid Dynamics BasicsDocument152 pagesFluid Dynamics BasicsSubhash PrabhuNo ratings yet
- Systematic Model Experiments on Flooding of Two Ro-Ro VesselsDocument18 pagesSystematic Model Experiments on Flooding of Two Ro-Ro Vesselsselvithimmarajan@gmail.comNo ratings yet
- The Turbulence Problem PDFDocument18 pagesThe Turbulence Problem PDFpablo jaraNo ratings yet
- TBM DEM ModelingDocument10 pagesTBM DEM ModelingczoobsNo ratings yet
- WS08 2D in Workbench 90Document10 pagesWS08 2D in Workbench 90czoobsNo ratings yet
- AB-520 Finite Element Analysis (FEA) RequirementsDocument4 pagesAB-520 Finite Element Analysis (FEA) Requirementsjohnj_ramirezNo ratings yet
- Analysis of A Grain Motion in The Transfer Area of The Belt ConveyorDocument14 pagesAnalysis of A Grain Motion in The Transfer Area of The Belt ConveyorczoobsNo ratings yet
- Operating Bolt Load Calculation in Joints of Complex Elastic StructuresDocument8 pagesOperating Bolt Load Calculation in Joints of Complex Elastic Structuresdf_campos3353No ratings yet
- Schopfer Et Al IRMMS 2009 RepositoryDocument42 pagesSchopfer Et Al IRMMS 2009 RepositoryczoobsNo ratings yet
- PADT TheFocus 19Document14 pagesPADT TheFocus 19czoobsNo ratings yet
- Haagensen P6 Life AssessmentsDocument41 pagesHaagensen P6 Life AssessmentsmigescuNo ratings yet
- Advanced Loads WB CAEADocument29 pagesAdvanced Loads WB CAEAJura PateregaNo ratings yet
- Contact Tips2 F04Document4 pagesContact Tips2 F04czoobsNo ratings yet
- Contact Tips2 F04Document4 pagesContact Tips2 F04czoobsNo ratings yet
- CGX 2.5Document123 pagesCGX 2.5czoobsNo ratings yet
- Hydraulic Arm: Build GuideDocument19 pagesHydraulic Arm: Build GuideczoobsNo ratings yet