You might also like
- 1 Prerequisites: 1.1 1. Sequences of Real NumbersDocument2 pages1 Prerequisites: 1.1 1. Sequences of Real NumbersEmilNo ratings yet
- Practical Guide 12 Surface IntegralsDocument20 pagesPractical Guide 12 Surface IntegralsEmilNo ratings yet
- Practical Guide 11 Spherical CoordinatesDocument9 pagesPractical Guide 11 Spherical CoordinatesEmilNo ratings yet
- Practical Guide 07 Integrals With ParametersDocument9 pagesPractical Guide 07 Integrals With ParametersEmilNo ratings yet
- Practical Guide 04 Local ExtremaDocument13 pagesPractical Guide 04 Local ExtremaEmilNo ratings yet
- Practical Guide 10 Polar CoordinatesDocument7 pagesPractical Guide 10 Polar CoordinatesEmilNo ratings yet
- Practical Guide 09 Double and Triple IntegralsDocument17 pagesPractical Guide 09 Double and Triple IntegralsEmilNo ratings yet
- Practical Guide 05 Improper IntegralsDocument7 pagesPractical Guide 05 Improper IntegralsEmilNo ratings yet
- Practical Guide 06 B and G FunctionsDocument4 pagesPractical Guide 06 B and G FunctionsEmilNo ratings yet
- Practical Guide 03 Power SeriesDocument8 pagesPractical Guide 03 Power SeriesEmilNo ratings yet
- 0.1 Practical Guide - Series of Real NumbersDocument3 pages0.1 Practical Guide - Series of Real NumbersEmilNo ratings yet
- 0.1 Practical Guide - Sequences of Real Numbers: N n1 N N NDocument3 pages0.1 Practical Guide - Sequences of Real Numbers: N n1 N N NEmilNo ratings yet
- Examples01 Seq & SeriesDocument9 pagesExamples01 Seq & SeriesEmilNo ratings yet
- Examples03 Limist & Contin PDFDocument5 pagesExamples03 Limist & Contin PDFkRsT11No ratings yet
- Examples02 Power SeriesDocument12 pagesExamples02 Power SeriesEmilNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Kinetics of a Particle: Forces and AccelerationsDocument63 pagesKinetics of a Particle: Forces and AccelerationsGIAN EMMANUELLE SANCHEZNo ratings yet
- Formula MathDocument3 pagesFormula MathAiman Juri100% (1)
- ANALYSIS OF PLANAR VEHICLE COLLISIONS USING IMPULSE AND MOMENTUMDocument16 pagesANALYSIS OF PLANAR VEHICLE COLLISIONS USING IMPULSE AND MOMENTUMIsabela Torres De MeloNo ratings yet
- Exp #3: Temperature Transducers: Objectives: To Understand The Operation of Thermistors and Realization of A TemperatureDocument15 pagesExp #3: Temperature Transducers: Objectives: To Understand The Operation of Thermistors and Realization of A TemperatureKhawar RiazNo ratings yet
- STPM 2015 Term 1 Trial SMK Sultan Abdul Hamid QuestionsDocument9 pagesSTPM 2015 Term 1 Trial SMK Sultan Abdul Hamid QuestionsSouseiseki ChromeNo ratings yet
- Adjust and test DM-332 digital multimeterDocument13 pagesAdjust and test DM-332 digital multimeterav100% (2)
- FY BSC Aeronautics (Avo)Document25 pagesFY BSC Aeronautics (Avo)Pritam BombleNo ratings yet
- PHY 101 PowerpointDocument233 pagesPHY 101 PowerpointSyed ShahNo ratings yet
- Pressurization CalculationDocument6 pagesPressurization CalculationAbdul HakkimNo ratings yet
- AiT Semiconductor PWM Controller with Green Mode FeaturesDocument11 pagesAiT Semiconductor PWM Controller with Green Mode FeaturesAlexandre Marido de AluguelNo ratings yet
- VK+Formula Calculation +sampleDocument4 pagesVK+Formula Calculation +sampleSudhakar Ys50% (2)
- TDS Total Dacnis-Se-46 1KV 202008 enDocument1 pageTDS Total Dacnis-Se-46 1KV 202008 enHendra KosasihNo ratings yet
- Quick Study - Physics Equations & AnswersDocument6 pagesQuick Study - Physics Equations & AnswersjavierfajardoNo ratings yet
- SGA-4586Z - SirenzaMicrodevices Markcode 45ZDocument4 pagesSGA-4586Z - SirenzaMicrodevices Markcode 45ZCharlesNo ratings yet
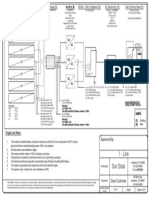
- Sample Solar Permit Plan - 1 Line Drawing PDFDocument1 pageSample Solar Permit Plan - 1 Line Drawing PDFSAEL SOLARNo ratings yet
- Batfusetypb Den1421wDocument2 pagesBatfusetypb Den1421wgamalNo ratings yet
- Pre-Lab Information: Virtual Lab: Newton's Second LawDocument8 pagesPre-Lab Information: Virtual Lab: Newton's Second LawBrenda GarciaNo ratings yet
- Solution ChapterDocument7 pagesSolution ChapterabhilashNo ratings yet
- Circular Curves NotesDocument112 pagesCircular Curves NotesA09MUHAMMAD HAZIQ ZAHIRUDDIN BIN HANAFINo ratings yet
- Effect of corona on transmission linesDocument5 pagesEffect of corona on transmission linesParimal PatelNo ratings yet
- Siemens Simodrive ManualDocument436 pagesSiemens Simodrive ManualMariel Lopez ValdezNo ratings yet
- Electrostatics Formula-1Document2 pagesElectrostatics Formula-1Aakash KumarNo ratings yet
- 2023-JEE Main-6-Paper (Gen-3)Document13 pages2023-JEE Main-6-Paper (Gen-3)AryanNo ratings yet
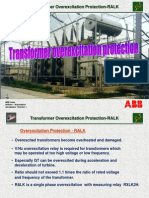
- Transformer Overexcitation Protection-RALK: ABB India Utilities - Automation Juliana/K Tickoo 1Document17 pagesTransformer Overexcitation Protection-RALK: ABB India Utilities - Automation Juliana/K Tickoo 1santoshkumarNo ratings yet
- Electricity For A Comfortable LifeDocument24 pagesElectricity For A Comfortable LifegayathmipereraNo ratings yet
- Utjecaj Zazora Stator Vs Magnet Na InduktivnostDocument6 pagesUtjecaj Zazora Stator Vs Magnet Na InduktivnostVlad ThalheimerNo ratings yet
- EXP3 - Introduction To Substation-Edited (New)Document5 pagesEXP3 - Introduction To Substation-Edited (New)Ainur NasuhaNo ratings yet
- Central Electricity Authority: Grid Management Division 1Document23 pagesCentral Electricity Authority: Grid Management Division 1fahiyanNo ratings yet
- Section1 10Document17 pagesSection1 10sonti11No ratings yet
- Energy-Saving Chillers With Screw Compressor Using Environmentally Friendly Refrigerant R134aDocument30 pagesEnergy-Saving Chillers With Screw Compressor Using Environmentally Friendly Refrigerant R134atechnokakiNo ratings yet