You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Solution Manual For Physics For Scientists and Engineers 4th Edition by Knight PDFDocument17 pagesSolution Manual For Physics For Scientists and Engineers 4th Edition by Knight PDFa198056681No ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- SMAST - 150kW 02190 - 200929091953Document67 pagesSMAST - 150kW 02190 - 200929091953David GarciaNo ratings yet
- 39 MM (1.54 In) : Wtb2-Epw2/4 Outline Dimension DrawingDocument1 page39 MM (1.54 In) : Wtb2-Epw2/4 Outline Dimension DrawingKiran KarthikNo ratings yet
- EU Declaration of Conformity: Catalog Series DescriptionDocument1 pageEU Declaration of Conformity: Catalog Series DescriptionKiran KarthikNo ratings yet
- Night Foot Lamp W PIR Sensor LED: SpecificationsDocument2 pagesNight Foot Lamp W PIR Sensor LED: SpecificationsKiran KarthikNo ratings yet
- C3controls Catalog Edition 27 2022 03Document593 pagesC3controls Catalog Edition 27 2022 03Kiran KarthikNo ratings yet
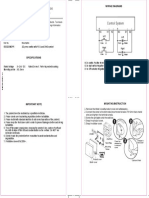
- Control System + +: Left LeftDocument1 pageControl System + +: Left LeftKiran KarthikNo ratings yet
- XCFR8.E145984 - Terminal Blocks Certified For Canada - ComponentDocument3 pagesXCFR8.E145984 - Terminal Blocks Certified For Canada - ComponentKiran KarthikNo ratings yet
- Heat Transfer Equivalent RC ModelDocument5 pagesHeat Transfer Equivalent RC ModelKiran KarthikNo ratings yet
- Through Technology Perfected by Research: Schneider-Electric - Co.inDocument2 pagesThrough Technology Perfected by Research: Schneider-Electric - Co.inKiran KarthikNo ratings yet
- Ampacities and Mechanical Properties of Rectangular Copper Busbars: Table 1. Ampacities of Copper No. 110Document4 pagesAmpacities and Mechanical Properties of Rectangular Copper Busbars: Table 1. Ampacities of Copper No. 110Kiran KarthikNo ratings yet
- Leitfaden IEC EN61439 en PDFDocument40 pagesLeitfaden IEC EN61439 en PDFmansa12No ratings yet
- Opale: Printing in Black Colour On Plain White PaperDocument1 pageOpale: Printing in Black Colour On Plain White PaperKiran KarthikNo ratings yet
- The New Standard IEC 61439: Low Voltage Switchgear and Controlgear AssembliesDocument20 pagesThe New Standard IEC 61439: Low Voltage Switchgear and Controlgear AssembliesAdnen BOUAZIZINo ratings yet
- US Sources of Busbar: Ansonia Copper and Brass, IncDocument2 pagesUS Sources of Busbar: Ansonia Copper and Brass, IncKiran KarthikNo ratings yet
- Shelf-Life Evaluation of Aluminuin Electrdytic CapacitcirsDocument7 pagesShelf-Life Evaluation of Aluminuin Electrdytic CapacitcirsKiran KarthikNo ratings yet
- DK 0011Document6 pagesDK 0011Kiran KarthikNo ratings yet
- Core Balance Current Transformer CBCT: FeaturesDocument1 pageCore Balance Current Transformer CBCT: FeaturesKiran KarthikNo ratings yet
- Storage - Instructions - ZF - en - AluminiumDocument1 pageStorage - Instructions - ZF - en - AluminiumKiran KarthikNo ratings yet
- Storage With Theoretical ExplainationDocument5 pagesStorage With Theoretical ExplainationKiran KarthikNo ratings yet
- 3WA Air Circuit Breakers: Integration in Switchgears According To IEC 61439Document1 page3WA Air Circuit Breakers: Integration in Switchgears According To IEC 61439Kiran KarthikNo ratings yet
- Aluminium - Handling, Storage, Maintenance and CleaningDocument7 pagesAluminium - Handling, Storage, Maintenance and CleaningKiran KarthikNo ratings yet
- 001.McKechnie Aluminium Solutions LTD - Handling and StorageDocument2 pages001.McKechnie Aluminium Solutions LTD - Handling and StorageKiran KarthikNo ratings yet
- Disjuntor SiemenesDocument15 pagesDisjuntor SiemenesDaviMiattelloRFNo ratings yet
- Dokumen - Tips Abb Technical Guide No04 RevcDocument44 pagesDokumen - Tips Abb Technical Guide No04 RevcKiran KarthikNo ratings yet
- DK 010Document64 pagesDK 010Kiran KarthikNo ratings yet
- GU - Cabine MT BT (EN) - 1VCP000591 1511Document88 pagesGU - Cabine MT BT (EN) - 1VCP000591 1511Fatmir JashariNo ratings yet
- Dokumen - Tips Abb Powerpoint Transformer Components Because Reliability Is Everything Vacuum OltcDocument29 pagesDokumen - Tips Abb Powerpoint Transformer Components Because Reliability Is Everything Vacuum OltcKiran KarthikNo ratings yet
- 3wn6 HB en 9905Document120 pages3wn6 HB en 9905Jaqueline RicardoNo ratings yet
- 3wa Infografik 1 en 9to16 LogoDocument1 page3wa Infografik 1 en 9to16 LogoKiran KarthikNo ratings yet
- Dokumen - Tips Ge Support Support Services Low Voltage Circuit Breaker Parts 1 High VoltageDocument41 pagesDokumen - Tips Ge Support Support Services Low Voltage Circuit Breaker Parts 1 High VoltageKiran KarthikNo ratings yet
- DK 006Document16 pagesDK 006Kiran KarthikNo ratings yet
- Insulation Coordination of UHV SubstationsDocument24 pagesInsulation Coordination of UHV Substationsmohamed faisalNo ratings yet
- ASCE 7-22 CH 04 - For PC - SouDocument22 pagesASCE 7-22 CH 04 - For PC - SousharethefilesNo ratings yet
- VFDB 4132 Series Brake Modules Instruction Sheet: Wiring WarningsDocument1 pageVFDB 4132 Series Brake Modules Instruction Sheet: Wiring WarningshugorococNo ratings yet
- 5 Wave Properties of ParticlesDocument49 pages5 Wave Properties of Particlesdata1217No ratings yet
- 2016specmath1 WDocument12 pages2016specmath1 WfraNo ratings yet
- Finite Element Method Magnetics: Pyfemm 0.1.3: User'S ManualDocument66 pagesFinite Element Method Magnetics: Pyfemm 0.1.3: User'S ManualnipplesNo ratings yet
- Question Bank PDFDocument103 pagesQuestion Bank PDFPramodVermaNo ratings yet
- SABP004 - Heat Exchanger and H Vessel FoundDocument35 pagesSABP004 - Heat Exchanger and H Vessel FoundgiovanniNo ratings yet
- Low Voltage Switchgear and Control Gear Application GuideDocument152 pagesLow Voltage Switchgear and Control Gear Application GuideAntonio MejiaNo ratings yet
- On The Move - Exam Style QsDocument8 pagesOn The Move - Exam Style QsAdam ChiangNo ratings yet
- Gr.12 Work Energy Power SummaryDocument1 pageGr.12 Work Energy Power SummarySaraNo ratings yet
- Lumbo Pelvic Laoding Fast BowlerDocument10 pagesLumbo Pelvic Laoding Fast BowlerMd. Ariful IslamNo ratings yet
- Objectives (All Chapters)Document82 pagesObjectives (All Chapters)Rana IrfanNo ratings yet
- Analysis of Belt Bucket ElevatorDocument4 pagesAnalysis of Belt Bucket ElevatorEditor IJTSRDNo ratings yet
- 9 Structural Analysis - Frames and Machines - Part BDocument22 pages9 Structural Analysis - Frames and Machines - Part BManikanta SutapalliNo ratings yet
- RMC-131D Data Sheet 4921240104 UK - 2014.06.25Document8 pagesRMC-131D Data Sheet 4921240104 UK - 2014.06.25Muhammad AhmadNo ratings yet
- London Penetration Critical CurrentsDocument15 pagesLondon Penetration Critical CurrentsUdit OjhaNo ratings yet
- L1408T EqpcchxDocument11 pagesL1408T Eqpcchxmarjorie vargas castroNo ratings yet
- Physics ProjectDocument15 pagesPhysics ProjectsaberNo ratings yet
- Aporte Julio Chambueta - Task 2Document12 pagesAporte Julio Chambueta - Task 2Katherine TorresNo ratings yet
- Technical: Question No. 1Document15 pagesTechnical: Question No. 1Jayanth KolliNo ratings yet
- Som PDFDocument666 pagesSom PDFTauseefNo ratings yet
- Presentation On FEKO by ZUBAIRDocument14 pagesPresentation On FEKO by ZUBAIRSakshiKoulNo ratings yet
- Machines 2 Tutorial 2 2015Document6 pagesMachines 2 Tutorial 2 2015ashauniNo ratings yet
- Kepler Problem - Wikipedia, The Free Encyclopedia PDFDocument4 pagesKepler Problem - Wikipedia, The Free Encyclopedia PDFrizal123No ratings yet
- Semiconductor Devices and Circuits LaboratoryDocument53 pagesSemiconductor Devices and Circuits LaboratoryKaryampudi RushendrababuNo ratings yet
- Electricity Web Quest 5 11 17Document4 pagesElectricity Web Quest 5 11 17api-2625864460% (1)