You might also like
- Advance Bio-Photon Analyzer ABPA A2 Home PageDocument5 pagesAdvance Bio-Photon Analyzer ABPA A2 Home PageStellaEstel100% (1)
- Protection of Microgrid Through Coordinated Directional Over-Current RelaysDocument6 pagesProtection of Microgrid Through Coordinated Directional Over-Current RelaysChristos ApostolopoulosNo ratings yet
- Sav 5446Document21 pagesSav 5446Michael100% (2)
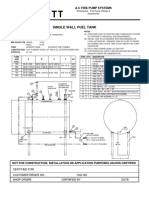
- Single Wall Fuel Tank: FP 2.7 A-C Fire Pump SystemsDocument1 pageSingle Wall Fuel Tank: FP 2.7 A-C Fire Pump Systemsricardo cardosoNo ratings yet
- Group 4 HR201 Last Case StudyDocument3 pagesGroup 4 HR201 Last Case StudyMatt Tejada100% (2)
- Distribution Voltage and Output Power Sharing Control For DC Microgrids Using Fuzzy Control and Gain-SchedulingDocument9 pagesDistribution Voltage and Output Power Sharing Control For DC Microgrids Using Fuzzy Control and Gain-SchedulingIJRASETPublicationsNo ratings yet
- Micro-Grid Modeling and ControlDocument24 pagesMicro-Grid Modeling and Controldebjyoti chatterjeeNo ratings yet
- 05IPST080Document6 pages05IPST080Niveditha NamasivaayamNo ratings yet
- 10.1109-JSYST.2013.2296075-Control Methods and Objectives For Electronically Coupled Distributed Energy Resources in Microgrids - A ReviewDocument13 pages10.1109-JSYST.2013.2296075-Control Methods and Objectives For Electronically Coupled Distributed Energy Resources in Microgrids - A Reviewarashalavi2006No ratings yet
- Microgrid Dynamic Performance Improvement Using A Doubly Fed Induction Wind GeneratorDocument9 pagesMicrogrid Dynamic Performance Improvement Using A Doubly Fed Induction Wind GeneratorDhinesh BaluNo ratings yet
- Technical Challenges On MicrogridsDocument6 pagesTechnical Challenges On Microgridsmalini72No ratings yet
- Modelling and Design of PID Controller For Voltage Control of AC Hybrid Micro-GridDocument9 pagesModelling and Design of PID Controller For Voltage Control of AC Hybrid Micro-GridRevit Mep Khoa Đ-đtspktNo ratings yet
- Implementation of Dijkstra's Algorithm in A Dynamic Microgrid For Relay Hierarchy DetectionDocument6 pagesImplementation of Dijkstra's Algorithm in A Dynamic Microgrid For Relay Hierarchy Detectionhoussem_ben_aribia6240No ratings yet
- Microgrids Formed by Renewable Energy Integration Into Power Grids Pose Electrical Protection ChallengesDocument26 pagesMicrogrids Formed by Renewable Energy Integration Into Power Grids Pose Electrical Protection ChallengesArjun ChatterjeeNo ratings yet
- Protection of Domestic Solar Photovoltaic Based Microgrid: M.P Nthontho, S.P Chowdhury, S. Winberg, S. ChowdhuryDocument6 pagesProtection of Domestic Solar Photovoltaic Based Microgrid: M.P Nthontho, S.P Chowdhury, S. Winberg, S. ChowdhuryMashood NasirNo ratings yet
- Generacion Distribuida PDFDocument17 pagesGeneracion Distribuida PDFFERNANDO BARROSNo ratings yet
- ALL 11 0935 TIE Part IDocument9 pagesALL 11 0935 TIE Part ISorin MiuNo ratings yet
- Control and Protection of Power Electronics Interfaced Distri-Buted Generation Systems in A Customer-Driven MicrogridDocument8 pagesControl and Protection of Power Electronics Interfaced Distri-Buted Generation Systems in A Customer-Driven MicrogridHedra GirgisNo ratings yet
- Microgrid Stability Characterization Subsequent To Fault-Triggered Islanding IncidentsDocument12 pagesMicrogrid Stability Characterization Subsequent To Fault-Triggered Islanding IncidentsBasilNo ratings yet
- Predictive Control Strategy Ensures Stable Microgrid OperationDocument20 pagesPredictive Control Strategy Ensures Stable Microgrid OperationIsmael MinchalaNo ratings yet
- Defining Control Strategies For MicroGrids Islanded OperationDocument9 pagesDefining Control Strategies For MicroGrids Islanded OperationNaveen AmarasingheNo ratings yet
- A Comprehensive Review On Issues, Investigations, Control and Protection Trends, Technical Challenges and Future Directions For Microgrid TechnologyDocument16 pagesA Comprehensive Review On Issues, Investigations, Control and Protection Trends, Technical Challenges and Future Directions For Microgrid Technologyabel alejandro gonzález rodríguezNo ratings yet
- Hybrid Micro-Grid Operation Characterisation Based On Stability and Adherence To Grid CodesDocument10 pagesHybrid Micro-Grid Operation Characterisation Based On Stability and Adherence To Grid CodesKrisDom - InvestorNo ratings yet
- 06712064Document13 pages06712064Rahul SharmaNo ratings yet
- Control And Operation Of Grid Connected DC Source Based Distribution GenerationDocument4 pagesControl And Operation Of Grid Connected DC Source Based Distribution Generationgagan mahadevaNo ratings yet
- Control of Microgrid For Different Modes of Operation IJERTV5IS051001Document6 pagesControl of Microgrid For Different Modes of Operation IJERTV5IS051001Seerat Aaftaab BarkatNo ratings yet
- Investigation Into The Implementation of Auto Reclosing Scheme in Distribution Networks With High Penetration of DgsDocument5 pagesInvestigation Into The Implementation of Auto Reclosing Scheme in Distribution Networks With High Penetration of DgsAnonymous zzMfpoBxNo ratings yet
- Guerrero 2013Document18 pagesGuerrero 2013Prisila DinantiNo ratings yet
- Cutting Campus Energy Costs With Hierarchical ControlDocument17 pagesCutting Campus Energy Costs With Hierarchical Controlomar hamidNo ratings yet
- Major ProjectDocument4 pagesMajor ProjectAASHISH YADAVNo ratings yet
- Resources 08 00014Document28 pagesResources 08 00014NileshNo ratings yet
- IET Renewable Power Gen - 2024 - Sharma - A low voltage microgrid protection scheme using digital instrument transformersDocument12 pagesIET Renewable Power Gen - 2024 - Sharma - A low voltage microgrid protection scheme using digital instrument transformerskhitech2002No ratings yet
- System Configuration, Fault Detection, Location, Isolation and Restoration: A Review On LVDC Microgrid ProtectionsDocument32 pagesSystem Configuration, Fault Detection, Location, Isolation and Restoration: A Review On LVDC Microgrid Protectionssushovan bhowmikNo ratings yet
- Novel Protection Schema For A Radial Microgrid SystemDocument6 pagesNovel Protection Schema For A Radial Microgrid SystempouyanNo ratings yet
- Fuzzy control of WT with DFIG for microgrid integrationDocument25 pagesFuzzy control of WT with DFIG for microgrid integrationAlberto ImperatoNo ratings yet
- 1final Iete - Forth Revision1Document10 pages1final Iete - Forth Revision1Dr. Monika JainNo ratings yet
- (2010) Cooperative Control Strategy of Energy Storage System and Microsources For Stabilizing The Microgrid During Islanded OperationDocument12 pages(2010) Cooperative Control Strategy of Energy Storage System and Microsources For Stabilizing The Microgrid During Islanded Operationabc1231234454252452342No ratings yet
- Energies 15 02295Document19 pagesEnergies 15 02295armandNo ratings yet
- Survey On Microgrid Control Strategies: Energy ProcediaDocument7 pagesSurvey On Microgrid Control Strategies: Energy Procediasureh32No ratings yet
- Power Flow and Fault Analysis in Smart Grid Systems: Zain SikanderDocument4 pagesPower Flow and Fault Analysis in Smart Grid Systems: Zain SikanderSyed Asad ShahNo ratings yet
- Hierarchical Model-Predictive Droop Control For Voltage and Frequency Restoration in AC MicrogridsDocument13 pagesHierarchical Model-Predictive Droop Control For Voltage and Frequency Restoration in AC Microgridsnaga_rajNo ratings yet
- A Novel Microgrid Islanding Classification Algorithm Based On Combining Hybrid Feature Extraction Approach With Deep Resnet ModelDocument20 pagesA Novel Microgrid Islanding Classification Algorithm Based On Combining Hybrid Feature Extraction Approach With Deep Resnet ModelHemza SellamnaNo ratings yet
- A New Directional Element Formicrogrid Protection PDFDocument15 pagesA New Directional Element Formicrogrid Protection PDFSourav DeNo ratings yet
- Intelligent Three Tie Contactor Switch Unit-Based Fault Detection and Isolation in DC MicrogridsDocument11 pagesIntelligent Three Tie Contactor Switch Unit-Based Fault Detection and Isolation in DC MicrogridsKarthikkeyan SNo ratings yet
- 7 ExpDocument9 pages7 ExpSuRaJ BroNo ratings yet
- Modeling of A Centralized Microgrid Protection System and Distributed Energy Resources According To IEC 61850-7-420Document8 pagesModeling of A Centralized Microgrid Protection System and Distributed Energy Resources According To IEC 61850-7-420AbhishekAnandNo ratings yet
- Control Strategies For Microgrids With Distributed Energy Storage Systems - An OverviewDocument15 pagesControl Strategies For Microgrids With Distributed Energy Storage Systems - An OverviewJoão Adolpho VictorioNo ratings yet
- Implementation of SCADA Systems For A Real Microgrid Lab TestbedDocument7 pagesImplementation of SCADA Systems For A Real Microgrid Lab TestbedJuan PavaNo ratings yet
- Evaluation of A Communication-Assisted Overcurrent Protection Scheme For Photovoltaic Based DC MicrogridDocument10 pagesEvaluation of A Communication-Assisted Overcurrent Protection Scheme For Photovoltaic Based DC Microgridrock starNo ratings yet
- DC Microgrid Operational Method For Enhanced Service Reliability Using DC Bus SignalingDocument13 pagesDC Microgrid Operational Method For Enhanced Service Reliability Using DC Bus SignalingJitender KaushalNo ratings yet
- Paper Id-1731Document4 pagesPaper Id-1731saurabhguptasgsits123No ratings yet
- Electronics 09 01959 v2Document14 pagesElectronics 09 01959 v2Reda DjatouNo ratings yet
- Grid Integration of Small-Scale Photovoltaic Systems in Secondary Distribution Network-A ReviewDocument18 pagesGrid Integration of Small-Scale Photovoltaic Systems in Secondary Distribution Network-A ReviewroyNo ratings yet
- Distributed Generation Monitoring For Hierarchical Control Applications in Smart MicrogridsDocument10 pagesDistributed Generation Monitoring For Hierarchical Control Applications in Smart Microgridssuzuki.wagnor234No ratings yet
- EE403: Distributed Generation and Smart Grid Previous Year Question PaperDocument11 pagesEE403: Distributed Generation and Smart Grid Previous Year Question PaperShravan SajNo ratings yet
- Development of An Outdoor Diesel Generator - PV Microgrid For Education and ResearchDocument5 pagesDevelopment of An Outdoor Diesel Generator - PV Microgrid For Education and ResearchSagar MudunuriNo ratings yet
- Multi-Microgrid Optimal Scheduling Considering Electric Vehicle ParticipationDocument6 pagesMulti-Microgrid Optimal Scheduling Considering Electric Vehicle ParticipationBruno PerezNo ratings yet
- Research Proposal ReportDocument23 pagesResearch Proposal ReportPravallika DarlaNo ratings yet
- Principles of Organization of Relay Protection in Microgrids With Distributed Power Generation Sources 1 - 2020Document7 pagesPrinciples of Organization of Relay Protection in Microgrids With Distributed Power Generation Sources 1 - 2020khanh khanhNo ratings yet
- Solar - Photovoltaic - Generators - With - MPPT - and - BatterDocument12 pagesSolar - Photovoltaic - Generators - With - MPPT - and - BatterCB MildredNo ratings yet
- Thesis Chapter 1Document14 pagesThesis Chapter 1Talha AkramNo ratings yet
- Joint RES and Distribution Network Expansion Planning Under a Demand Response FrameworkFrom EverandJoint RES and Distribution Network Expansion Planning Under a Demand Response FrameworkNo ratings yet
- THE INFLUENCE OF THE CONNECTION TECHNOLOGY of DG On Grid StabilityDocument4 pagesTHE INFLUENCE OF THE CONNECTION TECHNOLOGY of DG On Grid Stabilityapi-3738286No ratings yet
- Siting and Sizing of Distributed Generation For Optimal Microgrid ArchitectureDocument6 pagesSiting and Sizing of Distributed Generation For Optimal Microgrid Architectureapi-3738286No ratings yet
- Micro-Grid Powered by Photovoltaic and Micro TurbineDocument4 pagesMicro-Grid Powered by Photovoltaic and Micro Turbineapi-3738286No ratings yet
- Techno-Economic Evaluation of Off-Grid Hybrid Photo VoltaicDocument9 pagesTechno-Economic Evaluation of Off-Grid Hybrid Photo Voltaicapi-3738286100% (3)
- Optimal Sizing of Distributed Generators in MicrogridDocument8 pagesOptimal Sizing of Distributed Generators in Microgridapi-3738286No ratings yet
- Benefits From A Renewable Energy Village Electrification SystemDocument7 pagesBenefits From A Renewable Energy Village Electrification Systemapi-3738286100% (2)
- MicrogridsDocument17 pagesMicrogridsapi-19973865100% (1)
- Electric Power Micro-Grids PhDThesis200 Good 6Document187 pagesElectric Power Micro-Grids PhDThesis200 Good 6api-3738286100% (1)
- Optimum Utilization of Renewable Energy Sources in ADocument15 pagesOptimum Utilization of Renewable Energy Sources in Aapi-3738286100% (3)
- Assessment of Access To Electricity and The Socio-Economic Impacts inDocument14 pagesAssessment of Access To Electricity and The Socio-Economic Impacts inapi-3738286100% (2)
- Sesamo - DSS For Sustainable National Electric Power Finished)Document6 pagesSesamo - DSS For Sustainable National Electric Power Finished)api-3738286No ratings yet
- And Then They Lived Sustain Ably Ever After Assessment of RuralDocument11 pagesAnd Then They Lived Sustain Ably Ever After Assessment of Ruralapi-3738286No ratings yet
- Center For Sustainable and Portable Electrical Power (CSPEP) Finished)Document2 pagesCenter For Sustainable and Portable Electrical Power (CSPEP) Finished)api-3738286No ratings yet
- Executive Overview Energy Storage OptionsDocument6 pagesExecutive Overview Energy Storage Optionsapi-3697505No ratings yet
- Sustainable Electric Power Systems Finished)Document2 pagesSustainable Electric Power Systems Finished)api-3738286No ratings yet
- De Thi Chuyen Hai Duong 2014 2015 Tieng AnhDocument4 pagesDe Thi Chuyen Hai Duong 2014 2015 Tieng AnhHuong NguyenNo ratings yet
- Installing and Registering FSUIPCDocument7 pagesInstalling and Registering FSUIPCKAPTAN XNo ratings yet
- Module 5Document10 pagesModule 5kero keropiNo ratings yet
- Ayushman BharatDocument20 pagesAyushman BharatPRAGATI RAINo ratings yet
- Fundamentals of Corporate Finance Canadian Canadian 8th Edition Ross Test Bank 1Document36 pagesFundamentals of Corporate Finance Canadian Canadian 8th Edition Ross Test Bank 1jillhernandezqortfpmndz100% (22)
- Information Pack For Indonesian Candidate 23.06.2023Document6 pagesInformation Pack For Indonesian Candidate 23.06.2023Serevinna DewitaNo ratings yet
- Compilation of CasesDocument121 pagesCompilation of CasesMabelle ArellanoNo ratings yet
- Academy Broadcasting Services Managerial MapDocument1 pageAcademy Broadcasting Services Managerial MapAnthony WinklesonNo ratings yet
- Bar Exam 2016 Suggested Answers in Political LawDocument15 pagesBar Exam 2016 Suggested Answers in Political LawYlnne Cahlion KiwalanNo ratings yet
- SAP PS Step by Step OverviewDocument11 pagesSAP PS Step by Step Overviewanand.kumarNo ratings yet
- Department of Labor: kwc25 (Rev-01-05)Document24 pagesDepartment of Labor: kwc25 (Rev-01-05)USA_DepartmentOfLaborNo ratings yet
- Defect Prevention On SRS Through ChecklistDocument2 pagesDefect Prevention On SRS Through Checklistnew account new accountNo ratings yet
- Com 0991Document362 pagesCom 0991Facer DancerNo ratings yet
- Elementary School: Cash Disbursements RegisterDocument1 pageElementary School: Cash Disbursements RegisterRonilo DagumampanNo ratings yet
- Chapter 6: Structured Query Language (SQL) : Customer Custid Custname OccupationDocument16 pagesChapter 6: Structured Query Language (SQL) : Customer Custid Custname OccupationSarmila MahendranNo ratings yet
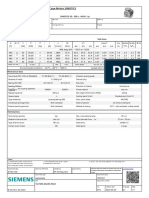
- 1LE1503-2AA43-4AA4 Datasheet enDocument1 page1LE1503-2AA43-4AA4 Datasheet enAndrei LupuNo ratings yet
- Product Manual 36693 (Revision D, 5/2015) : PG Base AssembliesDocument10 pagesProduct Manual 36693 (Revision D, 5/2015) : PG Base AssemblieslmarcheboutNo ratings yet
- Usa Easa 145Document31 pagesUsa Easa 145Surya VenkatNo ratings yet
- POS CAL SF No4 B2 BCF H300x300 7mmweld R0 PDFDocument23 pagesPOS CAL SF No4 B2 BCF H300x300 7mmweld R0 PDFNguyễn Duy QuangNo ratings yet
- Abb Drives: User'S Manual Flashdrop Mfdt-01Document62 pagesAbb Drives: User'S Manual Flashdrop Mfdt-01Сергей СалтыковNo ratings yet
- Pig PDFDocument74 pagesPig PDFNasron NasirNo ratings yet
- E-TON - Vector ST 250Document87 pagesE-TON - Vector ST 250mariusgrosyNo ratings yet
- 2022 Product Catalog WebDocument100 pages2022 Product Catalog WebEdinson Reyes ValderramaNo ratings yet
- ECON Value of The FirmDocument4 pagesECON Value of The FirmDomsNo ratings yet
- Basic Electrical Design of A PLC Panel (Wiring Diagrams) - EEPDocument6 pagesBasic Electrical Design of A PLC Panel (Wiring Diagrams) - EEPRobert GalarzaNo ratings yet
- 5.0 A Throttle Control H-BridgeDocument26 pages5.0 A Throttle Control H-Bridgerumellemur59No ratings yet