You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- ATP ManualDocument270 pagesATP ManualJose Jorge Fontalvo100% (1)
- Ieee Pes FinalDocument9 pagesIeee Pes FinallanoportoNo ratings yet
- Center of InertiaDocument6 pagesCenter of InertiaPacha MamiNo ratings yet
- Prony MethodDocument8 pagesProny MethodPacha MamiNo ratings yet
- Model Identification For Spinning Reserve Management UsingDocument5 pagesModel Identification For Spinning Reserve Management UsingPacha MamiNo ratings yet
- W. Sauer. Dynamic Modeling of Doubly Fed InductionDocument6 pagesW. Sauer. Dynamic Modeling of Doubly Fed InductionPacha MamiNo ratings yet
- Modeling and Analysis of Double Fed InductionDocument6 pagesModeling and Analysis of Double Fed InductionPacha MamiNo ratings yet
- Modeling of The Wind Turbine With A Doubly FedDocument8 pagesModeling of The Wind Turbine With A Doubly FedPacha MamiNo ratings yet
- Dynamic Modeling of GE 1.5 and 3.6 MW Wind Turbine-GeneratorsDocument7 pagesDynamic Modeling of GE 1.5 and 3.6 MW Wind Turbine-GeneratorsPacha MamiNo ratings yet
- Dynamic Modeling of GE 1.5 and 3.6 MW Wind Turbine-GeneratorsDocument7 pagesDynamic Modeling of GE 1.5 and 3.6 MW Wind Turbine-GeneratorsPacha MamiNo ratings yet
- PSCAD Course NotesDocument72 pagesPSCAD Course NotesPacha Mami100% (1)
- PSCAD Course NotesDocument72 pagesPSCAD Course NotesPacha Mami100% (1)
- 01198317Document7 pages01198317Arslan KhalidNo ratings yet
- Frequency Estimation PrintDocument10 pagesFrequency Estimation PrintPacha MamiNo ratings yet
- 2Document11 pages2Pacha MamiNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elk-04 C 145 2GHV008915 0414Document20 pagesElk-04 C 145 2GHV008915 0414lepijaNo ratings yet
- Ruppur Nuclear Power PlantDocument4 pagesRuppur Nuclear Power PlantShafi Muhammad IstiakNo ratings yet
- Ray Adil Salin GanayDocument6 pagesRay Adil Salin GanayJevan CalaqueNo ratings yet
- Ac ProblemsDocument1 pageAc ProblemsPramit PaulNo ratings yet
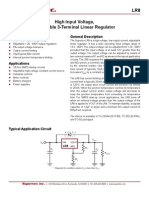
- Supertex Inc.: LR8 High Input Voltage, Adjustable 3-Terminal Linear RegulatorDocument10 pagesSupertex Inc.: LR8 High Input Voltage, Adjustable 3-Terminal Linear RegulatorristrettoNo ratings yet
- Notes On TransformerDocument2 pagesNotes On TransformerasdfNo ratings yet
- Page 1/1 Generated From National Portal of Rooftop Solar - Ministry of New & Renewable Energy / Govt. of India (National Informatic Centre)Document1 pagePage 1/1 Generated From National Portal of Rooftop Solar - Ministry of New & Renewable Energy / Govt. of India (National Informatic Centre)Sanjoy RoyNo ratings yet
- Joule ThiefDocument11 pagesJoule Thiefjkirwan100% (2)
- Sequence Impedances and Networks of Synchronous MachineDocument5 pagesSequence Impedances and Networks of Synchronous MachineJonathanNo ratings yet
- AC Generators2Document25 pagesAC Generators2Marie Claire GutierrezNo ratings yet
- 2º ESO Teconología Electrical - Circuits - ExercisesDocument8 pages2º ESO Teconología Electrical - Circuits - ExercisesPaloma IglesiasNo ratings yet
- Ned Mohan 1 PDFDocument9 pagesNed Mohan 1 PDFGuna SeelanNo ratings yet
- Costruction Planning and Control: 1 MW Solar Power Plant Installation Project Scheduling and TrackingDocument12 pagesCostruction Planning and Control: 1 MW Solar Power Plant Installation Project Scheduling and TrackingMohamed MoatazNo ratings yet
- ID-SPE-SELA36AI0150 Product Details PDFDocument3 pagesID-SPE-SELA36AI0150 Product Details PDFJuan Felipe Garza GNo ratings yet
- Diagnostic ManualDocument82 pagesDiagnostic ManualLeo Burns100% (1)
- 9700 ManualDocument64 pages9700 ManualGilberto OlveraNo ratings yet
- YWP111 - Application - Commissioning - Manual (2) .2012Document12 pagesYWP111 - Application - Commissioning - Manual (2) .2012maherNo ratings yet
- Electric Circuits Clo ZeDocument1 pageElectric Circuits Clo ZeSole GutiérrezNo ratings yet
- PsuDocument2 pagesPsuDeepika YadavNo ratings yet
- Current Transducer LT 100-P I 100 ADocument3 pagesCurrent Transducer LT 100-P I 100 AVinicius ReisNo ratings yet
- Installation and Maintenance Manual: High Resistance Grounding SystemsDocument7 pagesInstallation and Maintenance Manual: High Resistance Grounding SystemsSergio Henrique F. CArniettoNo ratings yet
- Major Acheivements of BhelDocument17 pagesMajor Acheivements of BhelKiruthika BaskarNo ratings yet
- BSPW/ BSPT Series: 5-6 kVA 6,5-10 kVADocument9 pagesBSPW/ BSPT Series: 5-6 kVA 6,5-10 kVAArief Wicaksono100% (1)
- ABB Inverter 50kW ConfigurationReportDocument1 pageABB Inverter 50kW ConfigurationReportZak SelesNo ratings yet
- Lecture 6 Circuit BreakersDocument31 pagesLecture 6 Circuit BreakersSyed KhizarNo ratings yet
- ELMARK Electrical 2014 WEBda3Document232 pagesELMARK Electrical 2014 WEBda3lolololo2000No ratings yet
- E740ENGDocument332 pagesE740ENGUmmu Adiba ShakilaNo ratings yet
- Solar PowerDocument29 pagesSolar PowerVijitashva AcharyaNo ratings yet
- Insulation Coordination For UHV AC Systems PDFDocument290 pagesInsulation Coordination For UHV AC Systems PDFsorry2qaz100% (2)
- Siemens Power Engineering Guide 7E 28Document1 pageSiemens Power Engineering Guide 7E 28mydearteacherNo ratings yet