You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Importance of Line Impedance MeasurementDocument5 pagesImportance of Line Impedance MeasurementEsakkiNo ratings yet
- A Narrative ReportDocument6 pagesA Narrative ReportKim Lamsen100% (1)
- Manual Instalación PBO 85 PDFDocument26 pagesManual Instalación PBO 85 PDFWilson ValladaresNo ratings yet
- Abb Manual On MV Switch GearDocument60 pagesAbb Manual On MV Switch GearUrooj RizviNo ratings yet
- 3TK28242BB40 Datasheet enDocument6 pages3TK28242BB40 Datasheet enkadir kayaNo ratings yet
- Country Profile Tunisia Report - 05.12.2016Document43 pagesCountry Profile Tunisia Report - 05.12.2016CHaima GHzayelNo ratings yet
- Designing A Boost-Switching Regulator With The MCP1650Document0 pagesDesigning A Boost-Switching Regulator With The MCP1650Asad MalikNo ratings yet
- Enbridge 09 Marshfield South - Project - VC3-ReportDocument9 pagesEnbridge 09 Marshfield South - Project - VC3-ReportLaura DiazNo ratings yet
- Circuit BreakerDocument21 pagesCircuit Breakerlingaraj patraNo ratings yet
- LM340T12 DatasheetDocument20 pagesLM340T12 DatasheetGilberto Cruz RuizNo ratings yet
- Chigo Inverters ManualDocument52 pagesChigo Inverters Manualhossimo33No ratings yet
- iV5L Manual ENG J55w6muhDocument388 pagesiV5L Manual ENG J55w6muhMohammad ShayebNo ratings yet
- TEL12-105F TEL12-105FS: Valve Regulated Lead Acid Battery For Communications Standby Power ApplicationsDocument2 pagesTEL12-105F TEL12-105FS: Valve Regulated Lead Acid Battery For Communications Standby Power ApplicationsALEX ALEXNo ratings yet
- The Product Life Cycle Support Policy See Life Cycle Overview Is (1) ...Document4 pagesThe Product Life Cycle Support Policy See Life Cycle Overview Is (1) ...Pradeep KumarNo ratings yet
- Manual de Partes Gen Set Cummins PDFDocument56 pagesManual de Partes Gen Set Cummins PDFJAIME MEJIA100% (2)
- Trans5 2019 09Document58 pagesTrans5 2019 09Balaji_Rajaman_2280No ratings yet
- GE Cable Laying InstrructionsDocument8 pagesGE Cable Laying InstrructionsAriel GhigliottoNo ratings yet
- ALSTOM HVDC For Beginners and BeyondDocument92 pagesALSTOM HVDC For Beginners and BeyondGiorgi ArzianiNo ratings yet
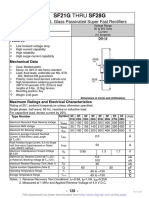
- Sf21G Thru Sf28G: 2.0 AMPS. Glass Passivated Super Fast RectifiersDocument2 pagesSf21G Thru Sf28G: 2.0 AMPS. Glass Passivated Super Fast RectifiersEdward MahNo ratings yet
- InfiniSolar 10KW ManualDocument53 pagesInfiniSolar 10KW ManualZeeshan AhmadNo ratings yet
- Advanced Genset Controller, AGC 200: Data SheetDocument33 pagesAdvanced Genset Controller, AGC 200: Data SheetSatyajit MNo ratings yet
- Strategy For Wind Energy Development in Myanmar - An Overview-IJAERDV04I0286529Document5 pagesStrategy For Wind Energy Development in Myanmar - An Overview-IJAERDV04I0286529Editor IJAERDNo ratings yet
- 320W Single Output With PFC Function: SeriesDocument4 pages320W Single Output With PFC Function: SeriesJesus HolmesNo ratings yet
- TDPDocument3 pagesTDPHarshad JoshiNo ratings yet
- Transformer Design and Application Considerations For Nonsinusoidal Load Currents PDFDocument13 pagesTransformer Design and Application Considerations For Nonsinusoidal Load Currents PDFRajuNo ratings yet
- Solenoid Valve Cables and Connectors: FeaturesDocument4 pagesSolenoid Valve Cables and Connectors: FeaturesAimmewaNo ratings yet
- Diagnostic Procedure With Diagnostic Trouble Code (DTC) V: DTC P0131 O2 Sensor Circuit Low Voltage (Bank 1 Sensor 1)Document2 pagesDiagnostic Procedure With Diagnostic Trouble Code (DTC) V: DTC P0131 O2 Sensor Circuit Low Voltage (Bank 1 Sensor 1)Nicholas FusaroNo ratings yet
- Crystal/Oscillator: PF Epaper Memory LCD TFT OledDocument1 pageCrystal/Oscillator: PF Epaper Memory LCD TFT OledyansyafNo ratings yet
- Electrical Machines 2 MARKSDocument9 pagesElectrical Machines 2 MARKSdtselvanNo ratings yet
- Aten PRO 1000 - DatasheetDocument2 pagesAten PRO 1000 - DatasheetNelu RosuNo ratings yet