You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
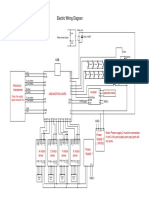
- Mach3 Electric Wiring DiagramDocument1 pageMach3 Electric Wiring DiagramSimasArmonas100% (1)
- Modem and Its CharacteristicsDocument14 pagesModem and Its CharacteristicsLeman CavadovaNo ratings yet
- 33 - Sliding Gate - Solution - ENGDocument5 pages33 - Sliding Gate - Solution - ENGIndustrial ItNo ratings yet
- ECG-1103B Service ManualDocument13 pagesECG-1103B Service ManualRaniel Aris Ligsay100% (1)
- Draft Format - Method Statement of Commissioning NURSE CALLDocument12 pagesDraft Format - Method Statement of Commissioning NURSE CALLmohammed naseer uddinNo ratings yet
- MGW R5Document2 pagesMGW R5Tonya HowardNo ratings yet
- TC26LX85Document98 pagesTC26LX85StevinNo ratings yet
- B. Write T On The Blank If The Statement Is True and F If The Statement Is FalseDocument1 pageB. Write T On The Blank If The Statement Is True and F If The Statement Is FalsePatricia Ann Dulce AmbataNo ratings yet
- Automated Shopping Trolley For Billing SystemDocument5 pagesAutomated Shopping Trolley For Billing SystemIJIRSTNo ratings yet
- A - Introduction B - Organisation C - Championships Program D - Technical E - Awards F - Matters Not Covered by These Rules AppendixDocument12 pagesA - Introduction B - Organisation C - Championships Program D - Technical E - Awards F - Matters Not Covered by These Rules AppendixAlex BerezinNo ratings yet
- Course Manual - NGNDocument12 pagesCourse Manual - NGNjugulkNo ratings yet
- Polyfuse: Seminar Report OnDocument24 pagesPolyfuse: Seminar Report OnPranjal JalanNo ratings yet
- Cadence Virtuso Layout EditorDocument18 pagesCadence Virtuso Layout EditorKrishna ChaitanyaNo ratings yet
- 8-Port Gpon Olt: Compact High Performance GPON OLT For Medium and Small OperatorDocument5 pages8-Port Gpon Olt: Compact High Performance GPON OLT For Medium and Small Operatordevsa ityNo ratings yet
- Mass Combi Ultra: Multi Purpose Charger InverterDocument32 pagesMass Combi Ultra: Multi Purpose Charger InverterPr. Samuel CostaNo ratings yet
- Wein Bridge OscillatorDocument3 pagesWein Bridge OscillatorSakshi GosaviNo ratings yet
- 6es7153 2ba02 0XB0Document3 pages6es7153 2ba02 0XB0HarunNo ratings yet
- Eaw KF 730Document6 pagesEaw KF 730Joêgo Wasly Silva SoaresNo ratings yet
- Measurements and Instrumentation (ELE 3202)Document4 pagesMeasurements and Instrumentation (ELE 3202)JithinNo ratings yet
- UCPDocument0 pagesUCPcontact_egypt2No ratings yet
- Digital Logic Design: Decoder & EncoderDocument20 pagesDigital Logic Design: Decoder & EncoderMd AshiqNo ratings yet
- TECHNICAL QUIZ EceDocument7 pagesTECHNICAL QUIZ EceAnonymous eWMnRr70qNo ratings yet
- 2sa1306 - 2sa1306a - 2sa1306bDocument3 pages2sa1306 - 2sa1306a - 2sa1306bisaiasvaNo ratings yet
- Module 1 It Application Tools in Business - CompressDocument38 pagesModule 1 It Application Tools in Business - CompressJames Ryan AlzonaNo ratings yet
- Sanyo PLC-WL2500 - SMDocument104 pagesSanyo PLC-WL2500 - SMHernando AlejandroNo ratings yet
- MS-7B49-1.1 (Intel - Coffeelake Plamform Z370)Document65 pagesMS-7B49-1.1 (Intel - Coffeelake Plamform Z370)Carlos GomesNo ratings yet
- Linear PotentiometerDocument3 pagesLinear PotentiometerProdip KhanikarNo ratings yet
- Chapter 1: Introduction To Networking: 1.1 What Is A Network?Document6 pagesChapter 1: Introduction To Networking: 1.1 What Is A Network?Marl MwegiNo ratings yet
- Audio CompressionDocument9 pagesAudio CompressionIshaan EvenidaNo ratings yet
- Ic M802 UDocument79 pagesIc M802 Uharis_fikriNo ratings yet