You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Azure Sentinel Deployment Best PracticesDocument71 pagesAzure Sentinel Deployment Best PracticesKoushikKc Chatterjee100% (1)
- Mitsubishi WD-73727 Distortion Flicker SolvedDocument15 pagesMitsubishi WD-73727 Distortion Flicker SolvedmlminierNo ratings yet
- Design, Development and Performance Evaluation of Solar Dryer With Mirror Booster For Red Chilli (Capsicum Annum)Document7 pagesDesign, Development and Performance Evaluation of Solar Dryer With Mirror Booster For Red Chilli (Capsicum Annum)seventhsensegroupNo ratings yet
- Fabrication of High Speed Indication and Automatic Pneumatic Braking SystemDocument7 pagesFabrication of High Speed Indication and Automatic Pneumatic Braking Systemseventhsensegroup0% (1)
- Implementation of Single Stage Three Level Power Factor Correction AC-DC Converter With Phase Shift ModulationDocument6 pagesImplementation of Single Stage Three Level Power Factor Correction AC-DC Converter With Phase Shift ModulationseventhsensegroupNo ratings yet
- Ijett V5N1P103Document4 pagesIjett V5N1P103Yosy NanaNo ratings yet
- FPGA Based Design and Implementation of Image Edge Detection Using Xilinx System GeneratorDocument4 pagesFPGA Based Design and Implementation of Image Edge Detection Using Xilinx System GeneratorseventhsensegroupNo ratings yet
- An Efficient and Empirical Model of Distributed ClusteringDocument5 pagesAn Efficient and Empirical Model of Distributed ClusteringseventhsensegroupNo ratings yet
- Non-Linear Static Analysis of Multi-Storied BuildingDocument5 pagesNon-Linear Static Analysis of Multi-Storied Buildingseventhsensegroup100% (1)
- Design and Implementation of Multiple Output Switch Mode Power SupplyDocument6 pagesDesign and Implementation of Multiple Output Switch Mode Power SupplyseventhsensegroupNo ratings yet
- Ijett V4i10p158Document6 pagesIjett V4i10p158pradeepjoshi007No ratings yet
- Experimental Analysis of Tobacco Seed Oil Blends With Diesel in Single Cylinder Ci-EngineDocument5 pagesExperimental Analysis of Tobacco Seed Oil Blends With Diesel in Single Cylinder Ci-EngineseventhsensegroupNo ratings yet
- Analysis of The Fixed Window Functions in The Fractional Fourier DomainDocument7 pagesAnalysis of The Fixed Window Functions in The Fractional Fourier DomainseventhsensegroupNo ratings yet
- Cl-29a5w8x Cl29a6p Ks3aDocument79 pagesCl-29a5w8x Cl29a6p Ks3aaerodomoNo ratings yet
- Ebooklet On IT Initiatives of National Health MissionDocument48 pagesEbooklet On IT Initiatives of National Health MissionhgukyNo ratings yet
- Modeling Transition State in GaussianDocument5 pagesModeling Transition State in GaussianBruno Moraes ServilhaNo ratings yet
- Tilt Switch OldDocument2 pagesTilt Switch OldAngel Francisco NavarroNo ratings yet
- Tutorial M WorksDocument171 pagesTutorial M WorksNazriNo ratings yet
- M Rades Mechanical Vibrations 2Document354 pagesM Rades Mechanical Vibrations 2Thuha LeNo ratings yet
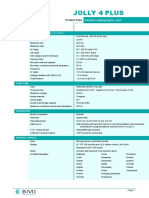
- JOLLY 4 PLUS (PD-01-E Rev. 20)Document3 pagesJOLLY 4 PLUS (PD-01-E Rev. 20)Nguyen AnhNo ratings yet
- Whitepaper: Chiva TokenDocument15 pagesWhitepaper: Chiva TokenMatzeboNo ratings yet
- Manual NTWDocument24 pagesManual NTWElias Melo JrNo ratings yet
- Sigtran Ss7: Asri WulandariDocument44 pagesSigtran Ss7: Asri WulandarifaisalNo ratings yet
- LogDocument8 pagesLogBBGETA 52No ratings yet
- Automated Testing ToolDocument20 pagesAutomated Testing TooltejaswiNo ratings yet
- Automatic Speech Recognition (ASR) : Omar Khalil Gómez - Università Di PisaDocument65 pagesAutomatic Speech Recognition (ASR) : Omar Khalil Gómez - Università Di PisaDanut Simionescu100% (1)
- 4.registration Form of RksDocument3 pages4.registration Form of Rksanon_57550479No ratings yet
- Unit 6 - Module-3 (Week-3) : Assignment 3Document6 pagesUnit 6 - Module-3 (Week-3) : Assignment 3Rohit DuttaNo ratings yet
- FBS115 PDFDocument2 pagesFBS115 PDFharmonoNo ratings yet
- Fuzzy Logic and Applications: Building GUI Interfaces in MatlabDocument7 pagesFuzzy Logic and Applications: Building GUI Interfaces in MatlabMuhammad Ubaid Ashraf ChaudharyNo ratings yet
- Ricardo Tapia Cesena: Java Solution Architect / SR FULL STACK Java DeveloperDocument9 pagesRicardo Tapia Cesena: Java Solution Architect / SR FULL STACK Java Developerkiran2710No ratings yet
- Checklist Audit Factorial HRDocument2 pagesChecklist Audit Factorial HRSoraya AisyahNo ratings yet
- Amazon Web Services in Action, Third Edition - Google BooksDocument2 pagesAmazon Web Services in Action, Third Edition - Google Bookskalinayak.prasadNo ratings yet
- Asmtiu 23Document356 pagesAsmtiu 23Gokul KrishnamoorthyNo ratings yet
- How To Extend The TCP Half-Close Timer For Specific TCP ServicesDocument1 pageHow To Extend The TCP Half-Close Timer For Specific TCP ServicesLibero RighiNo ratings yet
- Operating System MCQsDocument13 pagesOperating System MCQsmanish_singh51No ratings yet
- Ds-7600Ni-K1 Series NVR: Features and FunctionsDocument3 pagesDs-7600Ni-K1 Series NVR: Features and Functionskrlekrle123No ratings yet
- CRS212 1G 10S 1SplusIN - QGDocument3 pagesCRS212 1G 10S 1SplusIN - QGanthykoeNo ratings yet
- Nvidia 2019 InterviewDocument2 pagesNvidia 2019 InterviewShrikant CharthalNo ratings yet
- ACE Exam SamplDocument5 pagesACE Exam SamplShankar VPNo ratings yet
- Socket Programming - Client and Server PDFDocument3 pagesSocket Programming - Client and Server PDF一鸿No ratings yet