You might also like
- Mesh Generation: Advances and Applications in Computer Vision Mesh GenerationFrom EverandMesh Generation: Advances and Applications in Computer Vision Mesh GenerationNo ratings yet
- Lecture 19Document65 pagesLecture 19lelsyngamiNo ratings yet
- Wireframe ModelingDocument12 pagesWireframe Modelingramyasree.mathNo ratings yet
- Computer Graphics: Object RepresentationsDocument46 pagesComputer Graphics: Object RepresentationsMiskir BeNo ratings yet
- Computer Graphics: Rahmat Ullah KhanDocument14 pagesComputer Graphics: Rahmat Ullah KhanMuqadar AliNo ratings yet
- WireframeDocument32 pagesWireframeKamalkumar1405No ratings yet
- CG ch-8 (The Graphic Pipeline)Document22 pagesCG ch-8 (The Graphic Pipeline)Kay KhineNo ratings yet
- Unit III Geometrical Modelling Intro and Curve RepresentationDocument40 pagesUnit III Geometrical Modelling Intro and Curve RepresentationSuhasNo ratings yet
- Three-Dimensional Object RepresentationsDocument7 pagesThree-Dimensional Object RepresentationsRishab Mehta83% (6)
- Computer Graphics Applications of Computer Graphics: Input DevicesDocument21 pagesComputer Graphics Applications of Computer Graphics: Input DevicesLeela PallavaNo ratings yet
- Geometric ModelingDocument39 pagesGeometric ModelingPadmavathi Putra Lokesh100% (2)
- 3D CadDocument4 pages3D CadGowdhaman ElangovanNo ratings yet
- Unit - 4Document52 pagesUnit - 4qwdfghNo ratings yet
- 16 RepresentationDocument27 pages16 RepresentationVijay AnandhNo ratings yet
- GMDocument54 pagesGMMouktikaNo ratings yet
- CADM Unit Geometric Modeling - SurfacesDocument31 pagesCADM Unit Geometric Modeling - SurfacesWilsonNo ratings yet
- Cad Cam-6Document67 pagesCad Cam-6ShahmirBalochNo ratings yet
- Graphics Note 5-6Document27 pagesGraphics Note 5-6Technical DipeshNo ratings yet
- PGE 317: Map Reading, Remote Sensing and GIS: Lecture 3-4: Data Model & Geospatial DataDocument50 pagesPGE 317: Map Reading, Remote Sensing and GIS: Lecture 3-4: Data Model & Geospatial DatanayemNo ratings yet
- Wireframe ModelsDocument13 pagesWireframe ModelsSevyNo ratings yet
- English 1st SemDocument34 pagesEnglish 1st SemSRUJAN KALYANNo ratings yet
- Digital Image ProcessingDocument57 pagesDigital Image ProcessingYatish ChutaniNo ratings yet
- Unit 2 GraphicsDocument34 pagesUnit 2 GraphicsMs.Sangeetha Priya IT DepartNo ratings yet
- Point Pattern Matching: Pattern Recognition 2017/2018 Marc Van KreveldDocument74 pagesPoint Pattern Matching: Pattern Recognition 2017/2018 Marc Van KreveldSteven TranNo ratings yet
- 05 CSG ProceduralDocument86 pages05 CSG ProceduralDavid PomaNo ratings yet
- Computer Animation Lecture NotesDocument8 pagesComputer Animation Lecture NotesTerry ThomasNo ratings yet
- Delaunay Triangulation: Triangulated Irregular NetworkDocument6 pagesDelaunay Triangulation: Triangulated Irregular NetworkMade NandiniNo ratings yet
- Modelling Techniques in CADDocument33 pagesModelling Techniques in CAD9826100% (2)
- Reshaping Manufacturing:: Understanding 3D Printing ProcessesDocument90 pagesReshaping Manufacturing:: Understanding 3D Printing Processesganesh dongreNo ratings yet
- Chapter No.: 03: Geometric ModelingDocument22 pagesChapter No.: 03: Geometric ModelingParesh BhuvaNo ratings yet
- Shape Features: Dr.G.Malathi Associate Professor Senior, School of Computer Science and Engineering VIT ChennaiDocument45 pagesShape Features: Dr.G.Malathi Associate Professor Senior, School of Computer Science and Engineering VIT ChennaiMonark MehtaNo ratings yet
- CH Lecture 6Document55 pagesCH Lecture 6Sohail SakhaniNo ratings yet
- 3D Display MethodsDocument18 pages3D Display MethodsRajaRaman.GNo ratings yet
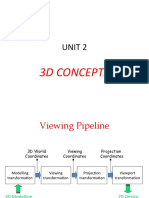
- Three Dimensional ConceptsDocument52 pagesThree Dimensional Conceptsmichael.ferrarisNo ratings yet
- Research Papers: 3D Model Generation From The Engineering DrawingDocument8 pagesResearch Papers: 3D Model Generation From The Engineering Drawingcooljoy4meNo ratings yet
- R & CIM Exam-I3 - Q$ADocument7 pagesR & CIM Exam-I3 - Q$AKamarul NizamNo ratings yet
- English 计算机图形学绪论-清华Document89 pagesEnglish 计算机图形学绪论-清华zur CuiNo ratings yet
- الخلاصة 2Document2 pagesالخلاصة 2Mustafa Hamdy MahmoudNo ratings yet
- 1319imguf UNIT 3Document60 pages1319imguf UNIT 3paratevedant1403No ratings yet
- Overview of 3D Object Representations: ModelingDocument16 pagesOverview of 3D Object Representations: Modelingmbhuvana_eshwariNo ratings yet
- Visible Surface Determination: CMSC 161: Interactive Computer GraphicsDocument34 pagesVisible Surface Determination: CMSC 161: Interactive Computer Graphicss_paraisoNo ratings yet
- Physical Design - Overall FlowDocument40 pagesPhysical Design - Overall Flowshabbir470No ratings yet
- Shader FundamentalsDocument154 pagesShader FundamentalsAlaa ZainNo ratings yet
- Image Segmentation: Ross Whitaker SCI Institute, School of Computing University of UtahDocument49 pagesImage Segmentation: Ross Whitaker SCI Institute, School of Computing University of UtahchrislucasNo ratings yet
- CGR Notes11Document2 pagesCGR Notes11N JainNo ratings yet
- ComputerGraphicsWeek3 (Rasterization)Document33 pagesComputerGraphicsWeek3 (Rasterization)Ayesha RahimNo ratings yet
- Gemetric Modelling 1Document37 pagesGemetric Modelling 1Lokesh loki VeguruNo ratings yet
- Curved SurfacesDocument14 pagesCurved SurfaceskannanvikneshNo ratings yet
- Doubly-Linked Half-Edge Data Structure: 3D RepresentationsDocument7 pagesDoubly-Linked Half-Edge Data Structure: 3D RepresentationsAnonymous 8R2q3FNo ratings yet
- Unit 1 - Part - IDocument48 pagesUnit 1 - Part - IVamsi KrishnaNo ratings yet
- CAD Lab ManualDocument45 pagesCAD Lab ManualAmul KumarNo ratings yet
- 3D ConceptspreDocument10 pages3D ConceptspreRajaRaman.GNo ratings yet
- Training CST 3Document50 pagesTraining CST 3Trần PhanNo ratings yet
- Chain CodesDocument10 pagesChain CodesSohail AfridiNo ratings yet
- Structured Light + Range Imaging Lecture #17Document41 pagesStructured Light + Range Imaging Lecture #17Anonymous iI88LtNo ratings yet
- 2 Data Base Structures and ModelsDocument22 pages2 Data Base Structures and Modelsbt21109002 AlishaNo ratings yet
- Digital Image ProcessingDocument10 pagesDigital Image ProcessingAnil KumarNo ratings yet
- Concepts of Gis 3Document28 pagesConcepts of Gis 3Tsion HailuNo ratings yet
- Computerg 1Document1 pageComputerg 1Abhishek DangolNo ratings yet
- HP Sustainability Impact Report 2018Document147 pagesHP Sustainability Impact Report 2018Rinaldo loboNo ratings yet
- SMK Techno ProjectDocument36 pagesSMK Techno Projectpraburaj619No ratings yet
- Epenisa 2Document9 pagesEpenisa 2api-316852165100% (1)
- Crawler Base DX500/DX600/DX680/ DX700/DX780/DX800: Original InstructionsDocument46 pagesCrawler Base DX500/DX600/DX680/ DX700/DX780/DX800: Original InstructionsdefiunikasungtiNo ratings yet
- 133 The Science and Understanding of TheDocument14 pages133 The Science and Understanding of TheCarlos RieraNo ratings yet
- Floor Paln ModelDocument15 pagesFloor Paln ModelSaurav RanjanNo ratings yet
- A Winning Formula: Debrief For The Asda Case (Chapter 14, Shaping Implementation Strategies) The Asda CaseDocument6 pagesA Winning Formula: Debrief For The Asda Case (Chapter 14, Shaping Implementation Strategies) The Asda CaseSpend ThriftNo ratings yet
- NX CAD CAM AutomationDocument12 pagesNX CAD CAM AutomationfalexgcNo ratings yet
- Tenancy Law ReviewerDocument19 pagesTenancy Law ReviewerSef KimNo ratings yet
- Stock Prediction SynopsisDocument3 pagesStock Prediction SynopsisPiyushPurohitNo ratings yet
- Portfolio Report Zarin Tasnim Tazin 1920143 8Document6 pagesPortfolio Report Zarin Tasnim Tazin 1920143 8Fahad AlfiNo ratings yet
- PartitionDocument5 pagesPartitionKotagiri AravindNo ratings yet
- Introduction To AirtelDocument6 pagesIntroduction To AirtelPriya Gupta100% (1)
- Entrep Q4 - Module 7Document5 pagesEntrep Q4 - Module 7Paula DT PelitoNo ratings yet
- Nisha Rough DraftDocument50 pagesNisha Rough DraftbharthanNo ratings yet
- Is.14785.2000 - Coast Down Test PDFDocument12 pagesIs.14785.2000 - Coast Down Test PDFVenkata NarayanaNo ratings yet
- Heat TreatmentsDocument14 pagesHeat Treatmentsravishankar100% (1)
- Mounting BearingDocument4 pagesMounting Bearingoka100% (1)
- Ticket Udupi To MumbaiDocument2 pagesTicket Udupi To MumbaikittushuklaNo ratings yet
- Department of Labor: 2nd Injury FundDocument140 pagesDepartment of Labor: 2nd Injury FundUSA_DepartmentOfLabor100% (1)
- The Finley ReportDocument46 pagesThe Finley ReportToronto StarNo ratings yet
- CH 2 Nature of ConflictDocument45 pagesCH 2 Nature of ConflictAbdullahAlNoman100% (2)
- Econ 1006 Summary Notes 1Document24 pagesEcon 1006 Summary Notes 1KulehNo ratings yet
- Fletcher Theophilus Ato CVDocument7 pagesFletcher Theophilus Ato CVTHEOPHILUS ATO FLETCHERNo ratings yet
- Dynamics of Interest Rate and Equity VolatilityDocument9 pagesDynamics of Interest Rate and Equity VolatilityZhenhuan SongNo ratings yet
- Pilot'S Operating Handbook: Robinson Helicopter CoDocument200 pagesPilot'S Operating Handbook: Robinson Helicopter CoJoseph BensonNo ratings yet
- Powerpoint Presentation R.A 7877 - Anti Sexual Harassment ActDocument14 pagesPowerpoint Presentation R.A 7877 - Anti Sexual Harassment ActApple100% (1)
- ACM2002D (Display 20x2)Document12 pagesACM2002D (Display 20x2)Marcelo ArtolaNo ratings yet
- CT018 3 1itcpDocument31 pagesCT018 3 1itcpraghav rajNo ratings yet
- Interest Rates and Bond Valuation: All Rights ReservedDocument22 pagesInterest Rates and Bond Valuation: All Rights ReservedAnonymous f7wV1lQKRNo ratings yet