Professional Documents
Culture Documents
Cont. I - Cap. I
Uploaded by
Washington Nilver Quispe OrihuelaCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Cont. I - Cap. I
Uploaded by
Washington Nilver Quispe OrihuelaCopyright:
Available Formats
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
CAPITULO I
I. FUNDAMENTO DE LOS SISTEMAS DE CONTROL
1.0 INTRODUCCION
Un sistema como primera definicin podemos considerar como una caja negra
que tiene una entrada y una salida indicadas por lneas con flechas que hacen
referencias de estas entradas y salidas.
Esta caja negra tiene un conjunto de elementos sometidos a fuerzas de la
naturaleza y conformado por leyes fsicas que supone una relacin de causa
efecto.
Ejemplo:
a. la generacin de la energa elctrica que puede ser hidrulica o
trmica.
. El
motor elctrico
c. !
epresentado al sistema como un conjunto de su. "istema enlazado en
"erie y como es el caso de un sistema de medicin de temperatura.
1.1
HISTORIA DE LA INGENIERA DE CONTROL
#odo sistema de control se asa en el mejoramiento de los mtodos de
retroalimentacin para controlar al sistema$ de tal forma que las primeras
aplicaciones datan:
1
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
a. %el tiempo de los griegos$ que realizaron mecanismos reguladores con
flotador. &ue mostraa 'arias formas de mecanismos de agua mediante
reguladores con flotador.
. (os raes perfeccionaron este conocimiento con la construccin de
relojes de agua.
c. En Europa se dise) un regulador de temperatura que se emple en
*ncuadoras de pollos. "e in'ent el primer regulador de presin para
calderas de 'apor.
d. El primer regulador con realimentacin automtica usado en un
proceso$
industrial$ y que para muchos representa el primer sistema de control
automtico y punto de partida de esta ciencia$ fue el regulador centrfugo
de +ames ,att$ desarrollado en -../ para controlar la 'elocidad de una
mquina de 'apor. El dispositi'o$ completamente mecnico$ seg0n se
muestra en la figura.
Este regulador meda la 'elocidad del eje de salida por medio de un
tren de engranajes$ unas masas esfricas 1contrapesos2$ al girar$ deido
a la fuerza centrifuga$ regulaan$ por medio de un sistema de palancas$
el mo'imiento de una 'l'ula mariposa que controlaa la entrada de
'apor a la mquina .3onforme aumenta la 'elocidad de la mquina$ se
le'antan los pesos que hacen deslizar un collar m'il$ pro'ocando el
cierre de la 'l'ula de entrada de 'apor. "i la 'elocidad disminuye$ se
produce la accin contraria. El camio en la 'elocidad deseada de
rgimen se lograa ajustando los razos de la palanca de las arras o
2
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
enlaces mecnicos. Este regulador era propenso a las oscilaciones
1inestailidad2 y ello hizo que fuera ojeto de muchas in'estigaciones.
e. En -454$ +.3.6a78ell$ en un artculo pulicado con el titulo9 :n
;o'ernors9$ propuso una solucin al prolema de los reguladores
centrfugos$ utilizando una ecuacin diferencial y analizando las
condiciones de estailidad para un sistema de tercer orden$ pero fue
capaz de e7tender su teora a sistemas de un orden ms ele'ado.
f. En -4.<$ +ohn !outh$ nacid en 3anad$ profesor en 3amridge$ fue
3apaz de determinar las condiciones de estailidad para sistemas de
hasta => orden.
g. En -4?=$ @ur8itz resol'i el prolema para orden . y en -?--$ Aompiani
Estaleci la equi'alencia de los criterios empleados por !outh y
@ur8itz que$ de forma independiente$ llegaron a las mismas
conclusiones.
h. En -4?B el ruso (iapuno' pulic su tesis doctoral C:n the ;eneral
Drolem :f "taility of 6otion9$ ideando una teora sore la estailidad
que era aplicale incluso a sistemas no lineales 1desgraciadamente$ este
traajo no se conoci en occidente hasta la dcada de los =/2.
i. %e forma paralela$ el ingeniero ingls :li'er @ea'isisde pulic en -4?E
un traajo que lle'aa por titulo C:n operators in mathematical physics9$
donde desarrollo unas teoras sore clculo operacional y que utiliz en
el estudio del comportamiento transitorio de circuitos y que permitan
analizar una ecuacin diferencial lineal como si fuera una ecuacin
algeraica .Esta tcnica fue justificada rigurosamente en -?-. por los
matemticos 3arson y Arom8ich$ F 'ieron que las ideas de @ea'iside se
asentaan en los traajos de (aplace 1-.<?G-4B.2 y este mtodo$
denominado C #ransformada de (aplace9 fue el que sir'i de inicio al
estudio matemtico de los sistemas de control lineal1 1aunque no se
aplic a este campo hasta la dcada -?</G-?=/2
j. H principios del II$ el desarrollo del control automtico fue muy lento$
deido a que se asaa primordialmente en sistemas mecnicos. 3ae
destacar$ sin emrago$ el traajo realizado por 6inorsJy en -?B/$ en
sistemas de direccin automtica de arcos y control de posicin de
ca)ones de aordo .Ko ostante$
El 'erdadero desarrollo de la teora de control 'a unido al desarrollo de
la electrnica. En -?B.$ @arold AlacJ$ ingeniero de los laoratorios Aell$
in'ent el amplificador con realimentacin negati'a. "e oser' que este
amplificador tenda a oscilar a ciertas frecuencias. El anlisis directo de
la estailidad del amplificador asndose en el planteamiento de las
ecuaciones diferenciales era in'iale$ dado el alto orden de la ecuacin.
@arry Kyquist 1-44?G-?.52 un sueco emigrado a Estados Unidos$ que
traajaa con AlacJ en la Aell #elphone$ pulic en -?EB su clere
artculo C!egenertion #heory$ en el que analizaa la estailidad del
amplificador realimentado en el dominio de la frecuencia$ utilizando el
concepto de anchura de anda y otras 'ariales dependientes de la
frecuencia. Esta teora dio origen a los mtodos de la respuesta en
frecuencia$ para el anlisis de la estailidad de los amplificadores
realimentados. :tras in'estigaciones en este campo fueron tamin
realizadas por @endriJ ,. Aode en -?</$ a quien se dee la introduccin
3
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
de las unidades logartmicas de ganancias 1el2 y frecuencia$ y a quien
se dee el procedimiento de dise)o que lle'a su nomre.
J. En el a)o -?E<$ hazen pulic el primer traajo analtico sore el dise)o
de sistemas de lazo cerrado y que fue origen de los que se sucedieron
despus. la palara Cser'omecanismo9 y su contraccin Cser'o9 fue
in'entada por l y se aplic a los sistemas de control realimentados. @oy
da$ la palara ser'omecanismo se reser'a$ e7clusi'amente$ a los
sistemas de control en los que la 'ariale controlada es una posicin
mecnica o deri'ada de sta 1'elocidad y aceleracin2.
l. @asta -?</$ la teora de control se desarroll en EEUU y Europa$ en
ase a la respuesta en el dominio de la frecuencia. En !usia se tendi a
utilizar una formulacin en el dominio del tiempo$ usando ecuaciones
diferenciales.
ll. %urante la *** ;uerra 6undial se realiz un gran a'ance en la teora y
prctica del control automtico$ ya que fue necesario dise)ar y construir
pilotos automticos para aeroplanos$ sistemas de direccin de tiro de
ca)ones y antenas de radar y otros sistemas militares asados en los
mtodos de control disponiles y foment el inters en los sistemas de
control y en el desarrollo de nue'os mtodos e ideas.
m. Hntes de -?</$ en la mayora de los casos$ el dise)o era un arte que
comprenda apro7imadamente por el procedimiento de ensayo y error.
%urante la dcada de -?</ se incrementaron en n0mero y utilidad los
mtodos matemticos y analticos$ ya la ingeniera de control lleg a ser
una disciplina completa. 6. @arris defendi en un artculo pulicado en
-?<B$ el uso de las funciones de transferencia y los diagramas de
loque$ Kichols realiz nue'os procedimientos grficos para el estudio
de la estailidad en el dominio de la frecuenciaL ;uillemin introdujo las
sntesis de redes y E'ans$ en -?<4$ desarroll el mtodo del lugar de las
races.
n. En la dcada -?=/ G-?5/ se hizo e7tensi'o el uso de la #ransformada de
(aplace y el plano de la frecuencia compleja. Hdems durante esa poca
fue posile la utilizacin de los ordenadores analgicos y digital como
componentes del control. Estos nue'os elementos proporcionaron una
capacidad para calcular con rapidez y e7actitud$ que no e7istan antes
para el ingeniero de control. En esta poca se suceden con gran rapidez
los artculos y te7tos sore ingeniera de control y temas afines.
o. En -?<.$ Mon Ke8man y 6orgenstern crean la teora de juegos y
+ames$ Kichols y Dhilips escrien C#heory of ser'omechanism9 donde
e7ponen y resumen las teoras ms importantes sore el control$ e
incorporan el tratamiento estadstico. En -?<4$ Korert ,iener pulica
su famosa ora C3yernetics9 1la palara cierntica$ creada por
8ieneres de la raz griega CNyernetiJe9$ y significa piloto o timonel2. En
-?<? "hanon y ,ea'er desarrollan la teora de la informacin. En -?=5.
".+.6ason pulica su clere artculo sore diagramas de flujo.
Hparecen traajos sore sistemas de control multi'ariale$ control digital$
etc.
p. %eido a la complejidad de los sistemas$ se hizo preciso un nue'o
enfoque matemtico de la teora de control$ apareciendo el concepto de
'ariales de estado. El espacio de estados ya haa sido utilizado por el
4
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
matemtico francs Doincar en -4?B$ pero no es sino a partir de -?=/
cuando se incorpora para el anlisis de sistemas de control.
q. 3on el ad'enimiento de "putniJ y la era espacial se dio otro nue'o
impulso a la ingeniera de control. "e hizo necesario dise)ar sistemas de
control complejo y altamente precisos para proyectiles y prueas
espaciales.
"e amplan los mtodos en el domino del tiempo$ espacio de estados$ y
sistemas no lineales. "e amplan los traajos de (lapuno' sore
estailidad. "e estudian los ser'omecanismos de tipo C:KO:PPC de
control por rles y se empiezan a estudiar los sistemas de control ptimo
y control adptati'o. (os procesos dise)o se realizan tanto en el dominio
del tiempo como en el del dominio de la frecuencia.
r. (a teora del control sigue incorporando nue'os mtodos que se aplican
a nue'as ramas del saer y son parte de un conte7to ms amplio$
denominado C*ngeniera de "istemas9 1trmino introducido por Mon
Aertalaffy en -?=<2. (a ingeniera de control est$ Qpor ello$ interesada en
el anlisis y dise)o de sistemas dirigidos hacia un ojeto. 3omo
consecuencia$ la mecanizacin de planes de accin dirigidos hacia un
ojeti'o se ha incrementado hasta estalecer una jerarqua de control
con cualidades de autoorganizacin$ adaptacin$ aprendizaje.
s. El control de un proceso industrial 1faricacin$ produccin$ etc2 por
medios automticos en 'ez de humanos se conoce frecuentemente
como Cautomatizacin9.
t. Una nue'a rea de la ingeniera de control es la Crotica industrial9$ que
en la actualidad representa una realidad ms que una ficcin. (os
roots industriales son un hecho cierto en la mecanizacin de procesos
producti'os$ en los que ordenadores$ sensores y mecanismos se
integran de un modo inteligente para producir autmatas cada 'ez ms
sofisticados.
i. Ko cae duda de que en la actualidad$ las tcnicas de *nteligencia
Hrtificial son las que ms atencin estn acaparando en el mundo de la
ingeniera de control. (os espectculares a'ances de la Electrnica
*ntegrada crean saltos cualitati'os y generan nue'as e7pectati'as$
insospechadas hasta no hace mucho$ el futuro de la nanotecnologa
computacin molecular y computacin cuntica$ son algunas de las
puertas que la ciencia est intentando arir y que a uen seguro$
supondrn nue'os saltos cualitati'os y cuantitati'os en el desarrollo de
la ingeniera de control.
1.2 SISTEMA DE CONTROL
5
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
Un sistema de control es una interrelacin de 'arias componentes que forman
el sistema donde la 'ariale de salida es controlada$ y ajustada para que tenga
un comportamiento pre fijado que proporciona la respuesta deseada.
En el anlisis de sistema de control se dee tener presente:
a. (as leyes fsicas que goierna al sistema o proceso.
Dlanteamiento de los sistema de ecuaciones.
c. Escoger el tipo de controlador para otener la salida deseada.
#odo sistema de control se asa en el criterio de la realimentacin y en el
anlisis de los sistemas lineales asados en el modelamiento con el fin de
otener modernos y complejos procesos de control.
1.2.1 TIPOS DE SISTEMA DE CONTROL
#odo sistema de control para su metodologa usa los criterios de los loques
funcionales para formar el sistema$ donde cada loque cumple con una
funcin particular en las EO" del sistema.
En este sentido e7isten dos formas sicas de sistema de control que son:
a. sistema de control de lazo aierto
. sistema de control de lazo cerrado
1.2.2 SISTEMA CONTROL LAZO ABIERTO
Este sistema se caracteriza por que la entrada es elegida en ase a la
e7periencia que se tiene con el sistema a fin de producir la salida requerida.
(a salida otenida no puede ser modificada por ning0n camio en las
condiciones de operacin e7terna del sistema.
Este sistema tiene un regulador o controlador con el fin de otener la respuesta
deseada.
"e oser'a que
la salida no tiene
efecto sore la se)al de entrada.
Estos sistemas tienen como 'entaja:
a. son sencillas y de ajo costo
. son de uena confiailidad$ pero con frecuencia son ine7actos$ por que
no hay correccin de errores.
1.2.2.1 ELEMENTOS BASICOS DE UN SISTEMA DE CONTROL DE LAZO
ABIERTO
6
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
ELEMENTOS DE CONTROL
Este elemento determina que accin se 'a a tomar ante una entrada en el
sistema de control.
ELEMENTO DE CORRECCION
Este elemento responde a la entrada que 'iene del elemento de control e inicia
la accin para producir camio en la 'ariale controlada al 'alor requerido.
PROCESO O PLANTA
Es el sistema en el que se 'a a controlar la 'ariale.
El elemento de control y el elemento de correccin se unen para formar el
controlador.
CONTROLADOR
Es un dispositi'o de control que en'a una se)al o una secuencia de se)ales
para iniciar la accin o una secuencia de acciones despus de alg0n periodo
de tiempo. El controlador representa el cerero del sistema de control.
Ejemplo
El caso de un calefactor elctrico$ que cuenta con una selector que permite
elegir una disipacin de - kw o B kw$ por lo que la entrada del sistema esta
determinado por la posicin del selector.
DEL
GRAFICO SE OBSERA!
ELEMENTO DE CONTROL! Es la persona que toma las decisiones asadas
en la e7periencia de las temperaturas producida mediante la conmutacin del
elemento calefactor.
ELEMENTO DE CORRECCION! Es el interruptor y el elemento calefactor.
PROCESO! !epresenta la haitacin.
7
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
1.2." SISTEMA DE CONTROL DE LAZO CERRADO
Es un sistema con retroalimentacin que utiliza una medicin adicional de la
salida real para compararla con la respuesta de la salida deseada.
Esta retroalimentacin se utiliza para modificar la entrada de modo que la
salida se mantenga constante a pesar de los camios en las condiciones de
operacin.
Ejemplo
%el sistema calefactor de lazo aierto que se ha 'isto$ lo lle'aremos a lazo
cerrado$ si monitoreamos con un termmetro la temperatura en la haitacin y
se enciende o apaga el elemento calefactor de - kwo B kwpara mantener la
temperatura de la haitacin constante.
DEL
GRAFICO
SE
OBSERA!
ARIABLE CONTROLADA! !epresenta la #emperatura 1 #
0
3 2.
ALOR DE REFERENCIA! !epresenta la temperatura requerida
en la haitacin.
ELEMENTO DE COMPARACI#N! !epresenta la persona que compara el
'alor medido y la temperatura
requerida.
SE$AL DE ERROR! %iferencia entre la #emperatura
requerida y la #emperatura medidas.
ELEMENTO DE CONTROL! !epresenta la persona.
8
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
ELEMENTO DE CORRECCI#N! Es la operacin manual de la persona
que opera el encendido del elemento
calefactor.
PROCESO! !epresenta la haitacin.
DISPOSITIO DE MEDICI#N! !epresenta el #ermmetro.
REALIMENTACI#N! Este caso siempre ser negati'o.
1.2.".1 ELEMENTOS BASICOS DE UN SISTEMA LAZO CERRADO
ARIABLE DE ENTRADA % e &
"on las entradas de referencia que 'an a definir el programa que seguir el
sistema. Esta 'ariale causa efectos del e7terior al sistema$ es una 'ariale
independiente$ 'iene a ser la 'ariale manipulada.
ELEMENTO DE COMPARACION
Es el elemento que compara el 'alor requerido o de referencia de la 'ariale
por controlar con el 'alor medido de la que se otiene en la salida y 'a a
producir una se)al de error que es la diferencia del 'alor otenido a la salida y
el 'alor requerido.
ELEMENTO DE CONTROL
Este elemento decide que accin tomara el sistema de control cuando recia
la se)al de error.
ELEMENTO DE CORRECCION
Este elemento produce un camio en el proceso al eliminar el error$ con
frecuencia se le conoce como actuador.
ARIABLE DE CONTROL % U &
Es la 'ariale que act0a directamente sore el sistema a controlar$ los cuales
son generados por el controlador.
ELEMENTO DEL PROCESO O PLANTA
9
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
Es el sistema donde se 'a a controlar la 'ariale de estado
) ...... , , (
3 2 1
etc x x x
.
ARIABLE DE ESTADO
) ...... , , (
3 2 1
etc x x x
Esta 'ariale es la que 'a a definir el estado del sistema y el conocimiento del
sistema en cualquier instante de tiempo.
ARIABLE PERTURBADORA % ' &
"on se)ales de carcter aleatorio que influye sore el sistema.
ELEMENTO DE MEDICION
Este elemento produce la se)al relacionada con la condicin de la 'ariale
controlada y proporciona la se)al de retroalimentacin al elemento de
comparacin para determinar si hay o no error. H este elemento se le conoce
como sensor.
1." TIPOS DE ENTRADAS ( SALIDAS
). MIMO
"on sistemas que tienen m0ltiples entradas 160ltiple lnput2 y m0ltiple salida
160ltiple :utput2.
*. S
IS
O
"on sistemas que tienen una entrada 1 "ingle *nput 2 y una salida 1 "ingle
:utput 2.
H la
'ariale de entrada o manipulada se le conoce como "et point. F es el punto
de control o 'alor que se desea que tenga la 'ariale controlada.
10
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
1.+ ESTRUCTURA DE UN SISTEMA DE CONTROL
"on tcnicas empleadas en un sistema control por aplicacin de la
cominacin del control por retroalimentacin y por la accin pre calculada o
anticipada.
(a cominacin de estas dos tcnicas permite realizar el modelamiento de un
sistema de control sico que permite simular los procesos y realizar
in'estigaciones para la seleccin y dise)o de los controladores a utilizar.
). CONTROL POR RETROALIMENTACION , FEED BAC- .
Este sistema de control realiza la accin correcti'a a las perturaciones no
medidas.
*.
CONTROL POR ACCION ANTICIPADA , FEED FOR/ARD .
E'ita la influencia de las perturaciones medidas$ se anticipa al ingreso de las
perturaciones.
1.0
CLASIFICACION DE LOS SISTEMA DE CONTROL
(os sistemas de control pueden ser clasicados$ de las siguientes maneras:
1.0.1 SEGUN SU DIMENSION.
"e tiene los siguientes casos:
SISTEMAS DE PARAMETROS CONCENTRADOS.
11
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
"on aquellos que pueden ser descritos por ecuaciones diferenciales ordinarias.
#amien son conocidos como sistemas de dimension finita.
SISTEMAS DE PARAMETROS DISTRIBUIDOS.
"on aquelos que requieren ecuaciones en diferencias 1ecuaciones diferenciales
con deri'adas parciales2$. #amien son conocidos como sistemas de dimension
infinita.
1.0.2 SEGUN EL CONOCIMIENTO DE SUS PARAMETROS.
"e tiene:
SISTEMAS DETERMINISTICO.
En estos sistemas se conocen e7actamente el 'alor que corresponde a los
parametros. Dor ejemplo un circuito !(3 encargado de suministrar tension a un
equipo.
SISTEMAS ESTOCASTICO.
En este caso$ la forma de conocer algunos o todos los 'alores de los
parametros$ es por medio de metodos proailisticos. Dor ejemplo un horno o
caldero que ha acumulado sarro y otras impurezas 1 las cuales no tienen una
funcion matematica conocida2.
1.0." SEGUN EL CARACTER DE TRANSMISION EN EL TIEMPO.
SISTEMAS CONTINUOS!
"on aquellos descritos por ecuaciones diferenciales$ donde las 'ariales
poseen un 'alor para todo tiempo posile dentro de un inter'alo de tiempo
finito. Esta referido a se)ales analogicas y su comportamiento matematico es
similar a una onda continua. Ejemplo el proceso de llenado de alones de gas.
SISTEMAS DISCRETO!
"on aquellos descrito mediante ecuaciones en diferencia$ y solo poseen
'alores para determinados instante de tiempo$ separados por inter'alos dados
por un periodo constante. Esta referido a las se)ales digitales$ y su
comportamiento matematico es similar a un tren de pulsos. Dor ejemplo el
encendido y apagado de un s8itch que acciona una alarma.
1.0.+ SEGUN LA PRESENCIA DE LINEALIDAD.
SISTEMAS LINEALES!
"on aquellos cuyo comportamiento esta definido por medio de ecuaciones
diferenciales lineales$ es decir$ los coeficientes son constantes o funciones de
'ariales independientes. %een cumplir con el principio de la superposicion.
Dor ejemplo un amplificador de se)ales.
12
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
SISTEMAS NO LINEALES!
3uando una o mas de las ecuaciones diferenciales no sean lineales. #amien
se considera como sistema no lineales a aquellos para los cuales el principio
de la superposicion no sea 'alido. Dor ejemplo el calentamiento de un horno.
1.0.0 SEGUN EL COMPORTAMIENTO EN EL TIEMPO.
SISTEMAS INARIANTES EN EL TIEMPO!
:curre cuando todos sus parametros son constante$ y por tanto se mantiene en
un estado estacionario permanente. "e definen por ecuaciones diferenciales
cuyos coeficiente se mantienen constante. Dor ejemplo la mezcla de sustancia
dentro de un tanque nque siempre contiene la misma cantidad y tipo de
elementos.
SISTEMAS ARIANTES EN EL TIEMPO!
3aso contrario al anterior$ es decir sus parametros 'arian en el tiempo$ por lo
tanto no se mantiene en estado estacionario$ "e define por sus ecuaciones
diferenciales cuyos coeficientes son funciones del tiempo. Dor ejemplo un
motor de un 'ehiculo de carrera$ su masa 'a a 'ariar por accion del consumo
de comustile.
1.0.1 SEGUN SUS APLICACIONES.
SISTEMAS SEROMECANISMO!
"on aquellos en donde la 'ariale controlada es la posicion o el incremento de
la posicion con respecto al tiempo. Dor ejemplo un mecanismo de control de
'elocidad$ un razo rootico$ etc.
SISTEMAS SECUENCIALES!
"on aquelos en donde un conjunto de operaciones preestalecidas es
ejecutadas en un orden dado. Dor ejemplo el arranque y parada de un motor
electrico$ a conmutacion delta G estrella de un motor electrico$ etc.
SISTEMAS NUMERICOS!
Esta referido aemas de control que almacenan informacion numerica$ la cual
incluye algunas 'ariales del proceso codificado por medio de instrucciones.
Dor ejemplo los tornos 3K3$ los cuales almacenan informacion referentes a
posicion$ direccion$ 'elocidad$ etc.
1.1 CARACTERISTICAS DE LOS SISTEMAS DE CONTROL
13
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
E7isten formas y metodos a tra'es de las cuales los sistemas de control
pueden ser representado por medios de funciones matematicas$ esta
representacion recie el nomre de modelamiento matematico las cuales 'an a
descriir las caracteristcas dinamicas del sistema a tra'es de ecuaciones
diferenciales. Este modelamiento puede ser:
ANALITICO!
3uando se aplica las leyes fisicas correspondientes a cada componente del
sistema$ que en conjunto forma una estructura o funcion matematica. El
analisis de esta funcion matematica permite descriir el comportamiento
dinamico en el tiempo$ es decir partiendo de sus caracteristicas matematicas se
puede llegar a concluciones respecto al funcionamiento del sistema$ tanto
aislado como dentro de una lazo cerrado$ afectado por ruido y goernado por
un controlador.
E2PERIMENTAL!
3onsiste en la identificacion de los parametros$ mediante el analisis de datos
de entrada y salida$ estimando 'alores posiles que se ajusten al sistema. Dara
lo cual se dee recoger datos de la 'ariale de salida con su correspondiente
dato de entrada que pro'oco dicha salida$ para luego mediante algoritmos
matematicos apro7imar a una funcion que represente la relacion entre la salida
y entrada del sistema$ dependiendo de la diferencia entre amas 1error2$ se
dara 'alidez a la funcion otenida.
1.3 OB4ETIO DE UN SISTEMA DE CONTROL
Un sistema de control cumple el ojeti'o de rindar un producto 0til y
econmico para la sociedad y la industria que estn sujetos a normas y
criterios que 'an a estalecer las leyes del control automtico.
LE( DE CONTROL
"on las especificaciones que se da a las se)ales interpretadas en trminos
matemticos$ en el inter'alo de tiempo de operacin que estn sujetas a
restricciones.
INDICE DE FUNCIONAMIENTO
Es la medida cuantitati'a del funcionamiento de un sistema de control
respecto a un funcionamiento ideal.
ANALISIS DE UN SISTEMA DE CONTROL
Es la in'estigacin ajo condiciones especificadas del funcionamiento del
sistema de control cuyo modelo matemtico se conoce.
PRO(ECTO
Es la secuencia que se realiza para que cumpla la tarea requerida.
14
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
SINTESIS
Es el mtodo matemtico desde el principio hasta el final para que un sistema
tenga un funcionamiento ideal.
1.5 LENGUA4E DE CONTROL
El control automtico tiene diferentes tcnicas matemticas que se emplean
para su anlisis como son:
). EN EL DOMINIO TIEMPO.
Emplean ecuaciones diferenciales que dan como resultado funciones de tipo
e7ponencial en el tiempo 1ingles2.
*. EN EL DOMINIO LAPLACE.
Empelan las transformaciones de laplace para estudiar los modelamientos$ las
funciones de transferencias$ los polos y ceros de una funcin 1ruso2.
6. EN EL DOMINIO FRECUENCIA.
Emplean la frecuencia para el anlisis de sistemas de control mediante el
diagrama de Aode$ Kichols$ Kyguist 1chino2.
7. ARIABLE DE ESTADO.
!epresenta el estudio de las 'ariales de estado mediante mtodos matriciales
para sistemas de ecuaciones diferenciales 1;riego2.
e. DOMINIO DE FOURIER.
Emplean la transformada de fourier para los sistemas de adquisicin de datos
1alemn2.
1.8 TRANSFORMADA DE LAPLACE
(a transformada de (aplace es una herramienta matemtica muy con'eniente
en el estudio de los sistemas de control$ ya que es un mtodo operacional
importante en la resolucin de las ecuaciones diferenciales que 'an a difinir el
comportamiento de los sistemas.
3on la aplicacin de la transformada de (aplace se han desarrollado tcnicas
grficas que predicen el comportamiento de los sistemas$ sin necesidad de
resol'er las ecuaciones que constituyen el modelo.
15
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
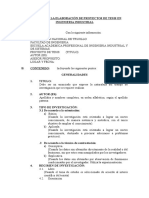
1.8.1 ARIABLES COMPLE4AS
Una 'ariale compleja C"9 se caracteriza por que tienen una componente real
C9 y una componente imaginaria Cj 89 o sea:
" R S j 8.
Una 'ariale compleja C "- 9 se representa grficamente por un punto en el
plano C"9.
1.8.2 FUNCIONES COMPLE4AS
Una funcin compleja ;1s2 se le define como una funcin de C " 9 que tiene
una parte real y una parte imaginaria.
;1s2 R ;7 S j ;y
;7$ ;y : "on cantidades reales.
2 2
y x
G G +
: 6agnitud de una cantidad compleja
,
_
Gy
Gx
Tg
1
: El ngulo o argumento$ el cual se mide desde el eje
Dositi'o real$ en sentido antihorario.
16
1
S1
S1 = 1 +jw1
j w1
0
Gy
Eje
Imaginario
Eje real
Re
Gx
( + )
( - )
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
Estas funciones complejas ;1s2 se aplican en sistemas de controles lineales
que son funciones simples de C"9$ determinada 0nicamente para un 'alor de
C"9 donde ;1s2$ puede ser:
a. Hnaltico
. Ko analtico
1.8.2.1 FUNCI#N COMPLE4A ANALTICA
Es cuando la funcin compleja ;1s2 se encuentra en una regin en el que 'a
a e7istir la funcin ;1s2 y todas las deri'adas de ;1s2
Hs una funcin compleja ;1s2 es analtica cuando el 'alor de su deri'ada sea
independiente de la eleccin del camino o recorrido que tenga ". "iendo
"R S j8
%onde " pueda tender a cero por diferente camino o recorrido que pueda
tener "$ estos puntos en el plano C"9 recien el nomre de puntos ordinarios
o regulares.
Ejemplo!
"e dee saer que el complejo conjugado de ;1s2 ser:
G(s) = Gx - jGy
"i ;1s2 es una funcin compleja analtica$ entonces la deri'ada de ;1s2 se
puede otener por dos caminos es decir cuando:
a. " R 1es decir el camino o recorrido de " es paralelo al eje real2.
. " R j8 1es decir el camino a recorrido de " es paralelo al eje
*maginario2.
3omo ;1s2 es analtica entonces R j 8 por lo que la deri'ada de ;1s2 es
0nica para cualquier otro camino o recorrido de " R S j 8
17
s
G
G
ds
d
s
G G
G
ds
d
limie
limie
0 s
(s)
) s ( s) (s
0 s
(s)
+
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
P)9) :; 6)m<;o 7e S =
P)9) o>9o 6)m<;o S = j /
Dara ser ;1s2 analtica se dee cumplir:
= jw
Hdems los dos 'alores de las deri'adas son iguales:
!"#de se $%m&le'
Estas dos ecuaciones son conocidas como la condicin de ;auchey
!iemann.
1.8.2.2 FUNCIONES COMPLE4A NO ANALTICA
Una funcin compleja no analtica es cuando los puntos del plano C"9 se
denominan puntos singulares:
a. Hs los puntos en los que la funcin ;1s2 o sus deri'adas tienden a infinito
se 'an a denominar polos.
. (os puntos en al funcin ;1s2 es igual a cero se denominan ceros.
Ejemplo!
"ea
18
,
_
y
x
y
x
s
G
j G
G
j
G
G
ds
d
ite
lim
0
) (
,
_
y
x
y
x
j
s
G
G
j
j
G
j
j
G
G
ds
d
ite
lim
0
) (
x
y y
x
G
j
G G
j
G
y
x
G
G
x
y
G
G
( )
( ) ( )
2
2 1
) (
p S p S
z b K
G
s
+ +
+
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
#endr polos en:
2 1
-& S , & - S
Hdems:
a. ;1s2 tendera al infinito a medida que C"9 tienden a C p 9 adems ;1s2
es una funcin compleja de la forma que ;1s2 tenga 1 s S p 2
n
nR -$ B$ ET
. ;1s2 tendr un 'alor finito no nulo en " R Gp$ la cual se denomina polo
de orden Cn9 donde:
n R - se llama polo simple
n R B$ ET se llama polo de segundo 0 tercer orden.
c. (os puntos en los que las funciones complejas ;1s2 igual a cero se
denomina ceros$ as en el ejemplo$ ;1s2 tienen un cero en " R Gz.
"i se incluyera los puntos en el infinito$ ;1s2 tendr la misma cantidad de polos
y ceros$ es decir tendr dos ceros en el infinito$ y un cero en el finito en " R Gz
1.10 DEFINICION DE LA TRANSFORMADA DE LAPLACE
"ea f1t2 una funcin de tiempo Ct9$ tal que f 1t2 R / para t U / y C"9 una 'ariale
compleja definida por " R S j 8$ si a la funcin f1t2 lo multiplicamos por e
Gst
y
se integra desde t R / hasta t R .
%onde:
P1"2 : #ransformada de (aplace de P
1"2
R V 1f
1t2
2
V : "molo operacional que indica que la cantidad que le sigue a de
"er transformada por la integral de (aplace
EL CASO
INERSO SER?!
19
0
s -
() (s)
e ( t d F
laplace de Integral dt e
st
o
( ) [ ] Laplace de Inversa da Transforma dt e F s F f
st
jw c
jw c
s t
2
1
) (
1
) (
+
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
c R constante real
CASOS PR?CTICOS!
). FUNCI#N ESCAL#N.
la funcin escaln cuya altura es la unidad$ recie el nomre de escaln
unitario.
*. FUNCI#N RAMPA
"ea la funcin rampa siguiente:
20
1
% w
( )
dt e u f F
st
t t s ) ( ) ( ) (
0
0
) (
st
e
S
dt
st
e
s
F
S
f F
t s
) (
) ( ) (
'
>
<
0 , 1
0 , 0
) (
) (
) (
t
t
t
f
f
u
s
f F
t s
1
) (
) ( ) (
) ( ) ( t t
u f
)
%()
'
0 ,
0 ,
) (
o
t
u
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
%onde:
CASO ESPECIAL
7. FUNCI#N E2PONENCIAL
"ea la funcin siguiente:
21
(
'
<
0 )
0 0
) (
t
t
f
t
dt e t F
t S
s
0 ) (
t S t S
t
e
S
v dt e dv
dt du t u
) (
1
vdu uv dv F
s
0 ) (
dt e
s
s
te
F
t S
t S
s
)
1
(
0
0
) (
* ) +(
0
0
) (
+ dt e
S
S
e t
F
t S
t S
s
0
2
0
) (
S
e
S
e t
F
t S t S
s
2
) (
S
F
s
+
S
F F
s s
) (
) ( ) (
'
<
0
0 0
) (
t e
t
f
t
t
0
) (
0
()
) ((
$"#s,#e s"# ),
dt e dt e e
t S t S
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
7. CASO DE UNA SENOIDE!
Do;7e @e p:e7e o*>e;e9!
1. PARA EL CASO
'
<
0
0 0
) (
t t sen
t
f
t
22
'
+
<
0 $"s
0 0
) (
t t sen j t
t
f
t
+
0
) ( ) (
j
. ) (
-
'
dt e e F f
e t Sen j t os
donde
t S t j
s t
j S
e
j S
f
dt e dt e f
t
t s j
t
1
1
) (
) (
0
) j - s ( -
) (
0
) j - s (
0
) (
) (
2 2 ) (
1
) (
+
+
+
+
S
j S
j S
j S
x
j S
f
ando !acionaliz
t
0
) ( ) (
( dt e t sen F f
t S
S t
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
{ }
{ }
j S j
j S j
f
dt e
j
dt e
j
f
t
t j S t j s
t
+
1
.
2
1
.
2
2
2
) (
0
) (
0
) (
) (
{ }
{ }
{ }
,
_
,
_
+
+
,
_
+
+
2 2 ) (
2 2 2 2 ) (
) (
2
.
1
.
1
2
s
f
s
j s
s
j s
j
f
j S
j S
j S j S
j S
j S j
f
t
t
t
2. PARA EL CASO
23
t Sen j e e
t Sen j t "os e
t Sen j t "os e
t j t j
t j
t j
2
-
-
j
e e
t sen
t j t j
2
{ } ( )
0
j j
) ( ) (
2
dt e e e
j
F f
S
S t
{ }
2 2 ) ( ) (
+
S
F f
s t
'
<
0 $"s
0 0
) (
t t
t
f
t
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
24
{ }
2 2
) ( ) (
+
s
S
F f
s t
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
25
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
26
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
27
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
28
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
29
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
30
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
31
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
32
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
33
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
34
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
1.11 PROPIEDADES
35
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
). "ea a-$ aB$ constante
P
-1s2
$ P
B1s2
$ #ransformada de (aplace
*. "i multiplicamos a f
1t2
por e
G t
entonces podemos otener la
transformada de (aplace
Es decir al multiplicar f1t2 por
t
e
-
$ tiene el efecto de
desplazar C " 9 por 1"S2 en la transformada de laplace$ donde puede ser
real a compleja.
Esta relacin es 0til para hallar la transformada de (aplace en funcin
t
e
-
"en 8 t y
t
e
-
cos 8 t.
E4EMPLO
@allar la ( ) t sen e
t
"e sae que
( )
) (
2 2
s
F
s
t sen
+
%e 1-2 se sae:
6. si:
( )
) ( ) ( s t
F f
36
( ) ) ( ) (
) ( 2 2 ) ( 1 1 ) ( 2 2 ) ( 1 1 t t t t
f a f a f a f a + +
( )
) ( 2 2 ) ( 1 1 ) ( 2 2 ) ( 1 1
S S t t
F a F a f a f a + +
( )
0
) ( ) (
dt e f e f e
st
t
t
t
t
( ) ) 1 .....(
) ( ) (
s t
t
F f e
( )
2 2 ) (
) (
+ +
+
s
F t sen e
s
t
( )
,
_
a
s t
F
a
f a
1
) (
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
%ada la dificultad que se presenta al solucionar ecuaciones diferenciales en el
tiempo$ se utiliza la transformada de laplace directa y luego la transformada
in'ersa$ de tal forma que se otiene una solucin fcil$ deiendo tener en
cuanta la siguiente.
FUNCI#N TRANSFORMADA
A,>. WWWWWWWWWWWWWWWW P1s2
B,>. WWWWWWWWWWWWWWWW F1s2
y C,>. WWWWWWWWWWWWWWWW " F1s2GF1o2
y CC,>. WWWWWWWWWWWWWWWW "
B
F1s2 " F1o2 GFX1o2
y CCC,>. WWWWWWWWWWWWWWWW "
E
F1s2 G"
B
F1o2 " FX
1o2
G FXX
1o2
E@ 7e6<9!
%onde F
,oD.
es el limite de f
,>.
para Ct9 oS
Ge;e9)l<');7o!
e.
APLICACI#N
1. H)ll)9 l) >9);@Ao9m)7) 7e l)pl)6e 7e!
37
) (
) (
) (
+
,
_
o
s
t
F F S
dt
f d
1
) (
1
) (
2
) (
1
) (
) (
......
+ +
1
1
]
1
n
o o
n
o
n
s
n
n
t
n
F F S F S F S
dt
f d
[ ]
s
s F
dt f
t
t
o
) (
) (
sent e t e t e f
t t t
t
3 3 3
) (
3 2 $"s 2 $"s
+ +
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
2. Re@olEe9
Apl<6);7o l)
>9);@Ao9m)7) 7e
l)pl)6e
Aplicando La Transformada inversa:
38
) 3 2 $"s 2 $"s ( ) (
3 3 3
) ( ) (
set e t e t e f F
t t t
t S
+ +
S#L$"I%&
( ) ( ) ( ) sent e t e t e F
t t t
S
3 3 3
) (
3 2 $"s 2 $"s
+ +
( )
2 2 2 2 2 2 ) (
1 ) 3 (
1 . 3
2 ) 3 (
) 3 ( 2
1 3
3
+ +
+
+ +
+
+
+ +
+
S S
S
s
s
F
S
( )
13 6
) 3 ( 2
10 6
6
2 2
) ( ) (
+ +
+
+
+ +
+
S s
S
S S
S
F f
s t
t
t t t t
e t y y y y
2
) (
1
) (
11
) (
111
) (
3 3 +
2 , 0 , 1
11
) 0 (
1
) 0 ( ) 0 (
' ' ' con
( ) ( ) ( ) ( ) ( )
t
t t t t
e t y y y y
2
) (
1
) (
11
) (
111
) (
3 3 +
S#L$"I%&
( ) ( )
( )
( ) ( ) ( )
( )
( ) ( )
( )
( )
3
1
0 0
2 11
) 0 (
1
) 0 ( 0
2 3
1
/ 2
3
3
+
s
' s'
' s' ' s ' s' ' s ' s
o s
s s
( ) ( ) ( )
( )
3 ) (
2 2 3
1
1 . 2
3 3 3 3 2
+ + +
s
' s' s ' s s ' s
S s s s
( )
( )
( )
( )
3
2
1
2 3
1
2
1 3 1 3 3
3
+ +
s
s s s s s '
s
s
( )
( ) ( )
( )
( ) ( )
3
2
6
3
2
6
1
1 1 1 2
1
2
1
1 3
1
2
+ +
+
+
+
s
s s s
s
'
s
s s
s
'
s
s
( )
( )
( ) ( )
( ) ( )
( )
( ) ( ) ( )
( )
( )
( )
( ) ( )
3 2 6
3 3 3
2
6 3
2
6
1
1
1
1
1
1
1
2
1
1
1
1
1
1
1
2
1
1 1 1
1
2
s s
s
s
'
s s
s
s
s
s s
s s
s
'
s
s
t t t t
s
S
t t t t
S
e
t
te e e
t
'
e
t
e
t
e e
t
'
2 60
) (
/ 2 / 1 / 5
2 ) (
2
) (
1
2 5
) (
1
+
+
t
s
t S
e t
t t
f ' 1
2 60
) (
2
) ( ) (
1
,
_
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
1.12 TRANSFORMADA INERSA
Es el proceso matemtico de pasar la e7presin de 'ariale compleja a la
e7presin en funcin del tiempo$ es decir al resol'er prolemas usando el
mtodo de transformada de (aplace$ deemos despus otener la f,>.
partiendo de P,@..
%onde:
1
! operador de la transformada in'ersa
c : Es una cost.
Un modo con'eniente de otener la transformada de in'ersa de laplace$ es
utilizando la tala de transformada de laplace$ si no se encuentra en la tala
una transformada de P,@. determinada$ se puede desarrollar aplicando el
mtodo P,@. en trminos de funciones de C"9 simple.
1.1" MFTODO DE DESARROLLO EN FUNCIONES PARCIALES PARA
HALLAR LA TRANSFORMADA INERSA DE LAPLACE
"i se descompone F(s), la transformada de la laplace de f(t) en sus
componentes.
F si son fcilmente otenile las transformadas in'ersas de laplace$ entonces:
:tenemos:
39
[ ] ) (
) (
1
t f F
s
+
>
j c
c
st
s t
t ds e F
nj
f
1
) ( ) (
0 ... .
2
1
) ( ) ( 2 ) ( 1 ) (
. ..........
S n S S S
F F F F + + +
) ( .... .......... ) ( ) ( ) (
) (
1
) ( 2
1
) ( 1
1
) (
1
s n s s s
F F F F
+ + +
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
En los prolemas de teora de control$ F(s) tienen frecuentemente la siguiente
forma:
A(s) y B(s) son polinomios en S, donde el grado A(s) es mayor que el de
B(s). Dara encontrar la transformada in'ersa se utiliza la tcnica de e7pansin
de fracciones parciales de F(s), donde sus trminos sern:
Do;7e!
n
( ( ( ( .... ,......... , ,
3 2 1
: "on 3antidades reales o
complejas
%enominados 'ariales donde P1s2 se
hace cero$ a estos 'alores se les llama
cero de F(s).
n
p p p p ,....... , ,
3 2 1
: "on cantidades reales o complejas
%onde en F(s) los 'alores se hacen
infinito a estos 'alores se le llama polos
de F(s).
n n
b b b a a a a ....... , , ,......... , ,
1 0 2 1 0
: "on n0meros reales.
%e las cuales pueden estalecerse:
1.1".1 SIN LAS RACES ,POLOS. NO SE REPITE
Es decir:
40
) ( ) ( 2 ) ( 1 ) (
.. ..........
t n t t t
f f f f + + +
) 1 .........(
) (
) (
) (
s
s
s
)
F
1 1
1
1
0 1
1
1
) (
. ..........
... ..........
a S a S a S a
b S b S b S b
F
n
n
n
n
m
m
m
m
s
+ + + +
+ + + +
( ) ( ) ( ) ( )
n
m
s
* S * S * S * S
( S ( S ( S ( S
F
+ + + +
+ + + +
...... ..........
) ....( )......... ( ) ( ) (
3 2 1
3 2 1
) (
n
p p p p .........
3 2 1
( ) ( ) ( ) ( ) ( )
n
n
n
s
s
p S
"
p S
"
p S
"
p S p S p S
)
F
+
+ +
+
+
+
+ + +
......
) ( .......
2
2
1
1
2 1
) (
) (
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
%onde para hallar C1 ,C2 ,C3 ,C1 Cn se procede
Ejemplo
C)l6:l)9 l) >9);@Ao9m)7) <;Ee9@) 7e!
Dor lo que primero factorizar el denominados
Do;7e!
1.1".2 SI LAS RACES O POLOS SE REPITE!
%onde:
n
" " " ,........ ,
2 1
: "e calcula de acuerdo al procedimiento anterior
41
( )
p s
s
s
n n
)
* S "
1
1
]
1
+
) (
) (
6 11 6
10 2
2 3 ) (
+ + +
+
S S S
S
F
S
S#L$"I%&
( ) ( ) ( )
) 3 )( 2 )( 1 (
) 6 5 )( 1 (
1 6 1 5 1
6 6 5 5 6 11 6
2
2
2 2 3 2 3
+ + +
+ + +
+ + + + +
+ + + + + + + +
S S S
S S S
S S S S S
S S S S S S S S
( )( )( ) 3 2 1
10 2
6 11 6
10 2
2 3 ) (
+ + +
+
+ + +
+
S S S
S
S S S
S
F
s
3
3
2 1
2 1
) (
+
+
+
+
+
S
"
S
"
S
"
F
s
( )
( )
( )( )
4
3 1 2 1
10 1 2
1
1
) (
) (
1
+ +
+
1
1
]
1
+
S
s
s
)
S "
( )
( )
( )( )
6
3 2 1 2
10 2 2
2
2
) (
) (
2
+ +
+
1
1
]
1
+
S
s
s
)
S "
( )
( )
( )( )
2
2 3 1 3
10 3 2
3
3
) (
) (
3
+ +
+
1
1
]
1
+
S
s
s
)
S "
( ) ( ) ( ) ( )
( ) ( )
i
r
i
r
i n
n
n
r
p S
+r
p S
+
p S
+
p S
"
p S
"
p S
"
s F
p S p S p S p S
s )
s F
+
+ +
+
+
+
+
+
+ +
+
+
+
+ + + +
........ ....... ) (
....... ....
) (
) (
1
2 1
2
2
1
1
2 2 1
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
r
+ + + ,....... ,
2 , 1 : "e calcula mediante
Ejemplo!
H)ll)9 l) >9);@Ao9m)7) <;Ee9@) 7e!
42
t t t
s
S
e e e
S S S
F
plicando
S S S
F
+onde
3 2 1 1 1
) (
1
1
) (
2 6 4
3
2
2
6
1
4
) (
3
2
2
6
1
4
'
+
,
_
+
+
,
_
+
,
_
+
+
+
( )
( )
( )
( )
( )
i S
r
i r r
*i S
s
s r
i
pi S
s
s r
i
pi S
s
s r
i
)
p S
ds
d
r
+
)
p S
s d
d
+
)
p S
s d
d
+
)
p S +
+
+
+
(s)
(s)
1
) (
) (
2
2
3
) (
) (
2
) (
) (
1
/ 1
1
..........
..........
.........
.........
/ 2
1
( ) ( ) 3 2
1
2 ) (
+ +
+
S S
S
F
s
S#L$"I%&
( ) ( ) ( ) ( ) ( ) 2 2 3 3 2
1
2
2 2 ) (
1
+
+
+
+
+
+ +
+
S
+
S
+
S
"
S S
S
F
s
( )
( )
( ) 1
3 2
1 2
2
2
2 3
1 3
3
2
) (
) ( 2
1
2
3
) (
) (
1
+
+
+
+
+
+
s
s
s
s
s
s
)
S +
)
S "
( )
( ) ( )
( )
2
3
3 1
3
1
2
2
2
2 0
) (
) ( 2
2
+
+ +
,
_
+
+
+
s
s
s
s
s
s s
s
s
ds
d
)
s
ds
d
+
( ) ( )
( )
,
_
+
+
,
_
+
,
_
+
+
+
+
+
2
2
2
1
3
2
2
2
2
1
3
2
) (
1
2
1 1 1
) (
1 -
2
) (
s s S
plicando
s s s
s F
s
F
CURSO : CONTRO I
DOCENTE : ING. ROBERTO JAIME QUIROZ SOSA
43
t t t
t
e te e F
2 2 3
) (
2 2
+
You might also like
- Alpha 30-20Document6 pagesAlpha 30-20Washington Nilver Quispe Orihuela100% (1)
- TROIDON 55 XP (Español) - REV. 190715Document4 pagesTROIDON 55 XP (Español) - REV. 190715Dennis MendozaNo ratings yet
- Manual de Operación - JMC 351 - Previo - CorrDocument122 pagesManual de Operación - JMC 351 - Previo - CorrWashington Nilver Quispe OrihuelaNo ratings yet
- Sistema de enfriamiento del motor HinoDocument7 pagesSistema de enfriamiento del motor HinoOscar Vicente Martinez100% (10)
- SPSSSDocument29 pagesSPSSSWashington Nilver Quispe OrihuelaNo ratings yet
- Manual de Operación - JMC 351 - Previo - CorrDocument122 pagesManual de Operación - JMC 351 - Previo - CorrWashington Nilver Quispe OrihuelaNo ratings yet
- MC 1606 154 - SS8 BOLT E Manual de OperaciónDocument30 pagesMC 1606 154 - SS8 BOLT E Manual de OperaciónWashington Nilver Quispe OrihuelaNo ratings yet
- APIDocument4 pagesAPIRoger ObregonNo ratings yet
- Proyecto Celdas SolaresDocument0 pagesProyecto Celdas SolaresKaMs GerrardNo ratings yet
- Perfo 3Document5 pagesPerfo 3josh1419No ratings yet
- Sistema - de - Frenos - 2 DetalladoDocument36 pagesSistema - de - Frenos - 2 DetalladoWashington Nilver Quispe OrihuelaNo ratings yet
- Medidas de Cigueñal Varias MarcasDocument6 pagesMedidas de Cigueñal Varias MarcasWashington Nilver Quispe Orihuela50% (2)
- Las Deudas de Tributo y Sus Efectos en La LiquidezDocument71 pagesLas Deudas de Tributo y Sus Efectos en La LiquidezethelNo ratings yet
- Introducción y Generalidades Gestión de MantenimientoDocument19 pagesIntroducción y Generalidades Gestión de MantenimientoWashington Nilver Quispe OrihuelaNo ratings yet
- Cap I Sold. OxigasDocument43 pagesCap I Sold. OxigasWashington Nilver Quispe OrihuelaNo ratings yet
- 291516.2013 RecuperaciónDocument148 pages291516.2013 RecuperaciónWashington Nilver Quispe OrihuelaNo ratings yet
- 470-1545-1-PB Artículos de AdministraciónDocument6 pages470-1545-1-PB Artículos de AdministraciónWashington Nilver Quispe OrihuelaNo ratings yet
- Subestaciones Electricas PDFDocument404 pagesSubestaciones Electricas PDFWashington Nilver Quispe Orihuela100% (4)
- Energias RenovablesDocument12 pagesEnergias RenovablesWashington Nilver Quispe OrihuelaNo ratings yet
- Las Deudas de Tributo y Sus Efectos en La LiquidezDocument71 pagesLas Deudas de Tributo y Sus Efectos en La LiquidezethelNo ratings yet
- El Arte D La GuerraDocument1 pageEl Arte D La GuerraWashington Nilver Quispe OrihuelaNo ratings yet
- Proyecto de Taller MecanicoDocument38 pagesProyecto de Taller Mecanicochristian coronel jordan100% (1)
- Las Deudas de Tributo y Sus Efectos en La LiquidezDocument71 pagesLas Deudas de Tributo y Sus Efectos en La LiquidezethelNo ratings yet
- Ups CT005241Document144 pagesUps CT005241Washington Nilver Quispe OrihuelaNo ratings yet
- Demografia ExposicionDocument4 pagesDemografia ExposicionWashington Nilver Quispe OrihuelaNo ratings yet
- Thermal Surface Technology (TST) - DefinitivaDocument7 pagesThermal Surface Technology (TST) - DefinitivaWashington Nilver Quispe OrihuelaNo ratings yet
- Trabajo DemingDocument36 pagesTrabajo DemingWashington Nilver Quispe OrihuelaNo ratings yet
- Diseño Sistema de Distribución de Energía EléctricaDocument4 pagesDiseño Sistema de Distribución de Energía EléctricaWashington Nilver Quispe OrihuelaNo ratings yet
- San-ud3-Proyeccion Termica y Recargue Por OxigasDocument10 pagesSan-ud3-Proyeccion Termica y Recargue Por OxigasWashington Nilver Quispe OrihuelaNo ratings yet
- Consumo de Energía ElectricaDocument18 pagesConsumo de Energía ElectricaWashington Nilver Quispe OrihuelaNo ratings yet
- Practico 2 - Casos Practicos Interes SimpleDocument15 pagesPractico 2 - Casos Practicos Interes SimpleRaisa PérezNo ratings yet
- UNAM FES Zaragoza equipo 1 prácticas flujo fluidosDocument93 pagesUNAM FES Zaragoza equipo 1 prácticas flujo fluidosAlejandro CamachoNo ratings yet
- Se Justifica El Conocimiento de La Verdadera CreenciaDocument7 pagesSe Justifica El Conocimiento de La Verdadera CreenciaJuan Deivi SantosNo ratings yet
- Función Trigonométrica de Ángulo Doble para Quinto de Secundaria PDFDocument3 pagesFunción Trigonométrica de Ángulo Doble para Quinto de Secundaria PDFlorena garciaNo ratings yet
- Planeacion de Ciencias II - Física - Bloque-1Document12 pagesPlaneacion de Ciencias II - Física - Bloque-1Héctor Fabián PérezNo ratings yet
- Diapositiva #13Document22 pagesDiapositiva #13Llenliz Rut Mendoza VelaysosaNo ratings yet
- Informe 6 Lab Fisica 3 UNMSMDocument12 pagesInforme 6 Lab Fisica 3 UNMSMkevin100% (1)
- 01) Reporte SAG 40 x26 Toromocho 27-04-2017 Rev.0Document13 pages01) Reporte SAG 40 x26 Toromocho 27-04-2017 Rev.0Samir Morales CadilloNo ratings yet
- Ejercicios de GasesDocument5 pagesEjercicios de GasesJeyder GeorgeNo ratings yet
- Carta Al Estudiante Met Num 1 2020Document2 pagesCarta Al Estudiante Met Num 1 2020Luis Fernando Arróliga MoralesNo ratings yet
- En El Eje de La FiguraDocument37 pagesEn El Eje de La FiguraSibaja Chávez LeandroNo ratings yet
- Integridad PDFDocument26 pagesIntegridad PDFJoshua PerryNo ratings yet
- 02 - Algebra (Rectas y Planos) (Respuestas)Document31 pages02 - Algebra (Rectas y Planos) (Respuestas)Enzo BaldacchinoNo ratings yet
- Documents - MX Analisis y Evaluacion Estructural de Puentes de PiedrapptxDocument16 pagesDocuments - MX Analisis y Evaluacion Estructural de Puentes de PiedrapptxLuis FrancoNo ratings yet
- Lista1 PDFDocument18 pagesLista1 PDFdiegoNo ratings yet
- Introducción al análisis fluido dinámico con ANSYS MULTIPHYSICSDocument37 pagesIntroducción al análisis fluido dinámico con ANSYS MULTIPHYSICSVictor Gimenez100% (1)
- Informe 1: Gases IdealesDocument14 pagesInforme 1: Gases IdealesLuis Alonso Ramos NuñezNo ratings yet
- EscalasDocument8 pagesEscalasJomara RossellNo ratings yet
- Sustentacionde Trabajo ColaborativoDocument6 pagesSustentacionde Trabajo Colaborativotatiana falonNo ratings yet
- Taller Potenciacion de Numeros RealesDocument2 pagesTaller Potenciacion de Numeros RealesJOHN DOMINGUEZ100% (1)
- Calendario matemático - Mes de mayo (JEC urbanoDocument1 pageCalendario matemático - Mes de mayo (JEC urbanoRubel Veramendi EspinozaNo ratings yet
- Apunte Fisica IDocument118 pagesApunte Fisica ISusana Celeste CascoNo ratings yet
- Introducción NEPLANDocument14 pagesIntroducción NEPLANRuben Alvarez Ventura100% (1)
- Glosario Mat7Document3 pagesGlosario Mat7Ferrer Rico AdyazNo ratings yet
- Cinematica 13Document5 pagesCinematica 13Vanessa Menendez0% (1)
- Protocolo de Investigacion YURA.Document2 pagesProtocolo de Investigacion YURA.KevinNo ratings yet
- Formato de Proyecto de Tesis - Ing. Industrial UNTDocument4 pagesFormato de Proyecto de Tesis - Ing. Industrial UNTGerson LópezNo ratings yet
- Distribuciòn Probabilidad DiscretaDocument26 pagesDistribuciòn Probabilidad DiscretaVera AragonNo ratings yet
- Aluvid Glass2Document21 pagesAluvid Glass2FLAVIONo ratings yet
- Articulaciones Del Cuerpo y Lo SimbólicoDocument7 pagesArticulaciones Del Cuerpo y Lo SimbólicoEnriqueAndreiniNo ratings yet