You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Thb7128 InstructionsDocument9 pagesThb7128 InstructionsanhxcoNo ratings yet
- LB1824 PowerBrushlessMotorDriverDocument10 pagesLB1824 PowerBrushlessMotorDriverwhynot05No ratings yet
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
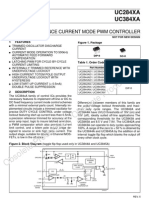
- Uc284xa Uc384xaDocument16 pagesUc284xa Uc384xayusufwpNo ratings yet
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsFrom EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsNo ratings yet
- Intelligent CCFL Inverter Controller: FeaturesDocument12 pagesIntelligent CCFL Inverter Controller: FeaturesMirosław DżumakNo ratings yet
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1From EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Rating: 4.5 out of 5 stars4.5/5 (3)
- Datasheet DC MotorDocument9 pagesDatasheet DC MotorKosala KapukotuwaNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Uc3844 DDocument16 pagesUc3844 DFaisalMalikNo ratings yet
- Universal DC/DC Converter: (Top View)Document11 pagesUniversal DC/DC Converter: (Top View)Engine Tuning UpNo ratings yet
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- Data SheetDocument14 pagesData SheetGavril GiurgiNo ratings yet
- Precision Phase-Locked Loop: ... The Analog Plus CompanyDocument21 pagesPrecision Phase-Locked Loop: ... The Analog Plus Companykao08No ratings yet
- High Voltage Resonant Controller: DescriptionDocument17 pagesHigh Voltage Resonant Controller: DescriptionJesus SilvaNo ratings yet
- Uc3844 DDocument16 pagesUc3844 DankurmalviyaNo ratings yet
- Mach Cong Suat Cau H - Lmd18200Document14 pagesMach Cong Suat Cau H - Lmd18200hieuhuech1No ratings yet
- STRW6252Document15 pagesSTRW6252miltoncgNo ratings yet
- Transition-Mode PFC Controller: 1 FeaturesDocument17 pagesTransition-Mode PFC Controller: 1 Featuresadriancho66No ratings yet
- Data Sheet Ic fr9886Document14 pagesData Sheet Ic fr9886Setya Budi S100% (1)
- Motor Driver For CD-ROMsDocument10 pagesMotor Driver For CD-ROMscostpopNo ratings yet
- Two-Phase Stepper Motor Driver: DescriptionDocument19 pagesTwo-Phase Stepper Motor Driver: DescriptionDan EsentherNo ratings yet
- TL494-D PWM Duty Cycle GenerationDocument14 pagesTL494-D PWM Duty Cycle GenerationMashood NasirNo ratings yet
- Tle6220gp DatasheetDocument18 pagesTle6220gp Datasheetmaelo99999No ratings yet
- 8205Document16 pages8205sonytinNo ratings yet
- Datasheet Fairchild UC3843Document7 pagesDatasheet Fairchild UC3843Tina JohnsonNo ratings yet
- MC1648 DataSheetDocument11 pagesMC1648 DataSheetKWojtekNo ratings yet
- Datasheet PDFDocument12 pagesDatasheet PDFmhenley8059No ratings yet
- Quad Low Side Driver: DescriptionDocument17 pagesQuad Low Side Driver: DescriptionDan EsentherNo ratings yet
- Fs 276 LFV 02Document12 pagesFs 276 LFV 02Pablo MgNo ratings yet
- CCFL Inverter IC OZ960Document12 pagesCCFL Inverter IC OZ960davesworkshopNo ratings yet
- 7214Document12 pages7214Dan EsentherNo ratings yet
- LB1823Document12 pagesLB1823oscmanNo ratings yet
- SG3524 SMPS Control Circuit: Description Pin ConfigurationDocument5 pagesSG3524 SMPS Control Circuit: Description Pin ConfigurationNiko OlnicasaNo ratings yet
- Features Descriptio: LTC485 Low Power RS485 Interface TransceiverDocument12 pagesFeatures Descriptio: LTC485 Low Power RS485 Interface TransceiverSidumisile SikhosanaNo ratings yet
- SN 761672 ADocument18 pagesSN 761672 AAda CsabaNo ratings yet
- Datasheet PDFDocument15 pagesDatasheet PDFperro sNo ratings yet
- SG3525A Pulse Width Modulator Control Circuit: 1% and The ErrorDocument10 pagesSG3525A Pulse Width Modulator Control Circuit: 1% and The ErrorJayesh SuryavanshiNo ratings yet
- AZ7500BC D1.3 070427nDocument13 pagesAZ7500BC D1.3 070427nroozbehxoxNo ratings yet
- Superstar 2200 - Service - Manual - ENG PDFDocument15 pagesSuperstar 2200 - Service - Manual - ENG PDFDan SorinNo ratings yet
- IRG4BC30K-S: Features Features Features Features FeaturesDocument8 pagesIRG4BC30K-S: Features Features Features Features FeaturesRafael MonzonNo ratings yet
- Green Mode PWM Controller Ap384XgDocument13 pagesGreen Mode PWM Controller Ap384XgbaphometabaddonNo ratings yet
- Data SheetDocument5 pagesData Sheetpartgio100% (1)
- TL494 BDocument14 pagesTL494 BOscar Solano NegreteNo ratings yet
- 04 Spec Sheet PWM Controller ChipDocument16 pages04 Spec Sheet PWM Controller Chipxuanhiendk2No ratings yet
- XR-215 PLLDocument32 pagesXR-215 PLLJ Jesús Villanueva GarcíaNo ratings yet
- TLP358 Datasheet en 20120306Document16 pagesTLP358 Datasheet en 20120306Kumaran ChakravarthyNo ratings yet
- TL494Document13 pagesTL494OVALLEPANo ratings yet
- TLP152 Datasheet en 20120914-736988Document11 pagesTLP152 Datasheet en 20120914-736988johnysonycumNo ratings yet
- Uc3842b 3843BDocument10 pagesUc3842b 3843Bbob75No ratings yet
- 1-Tle6240gp V3 1 1Document24 pages1-Tle6240gp V3 1 1Alexandre Da Silva PintoNo ratings yet
- General Purpose Type Photocoupler: (Unit: MM)Document5 pagesGeneral Purpose Type Photocoupler: (Unit: MM)Narendra Bhole100% (1)
- Datasheet Uc3810nDocument15 pagesDatasheet Uc3810nCarlos IbaNo ratings yet
- Tb62206Fg: Bicd PWM 2 Phase Bipolar Stepping Motor DriverDocument28 pagesTb62206Fg: Bicd PWM 2 Phase Bipolar Stepping Motor DriverLuis Alejandro Blanco CalvoNo ratings yet
- NCP 3063Document20 pagesNCP 3063Roozbeh BahmanyarNo ratings yet
- MC33030PDocument17 pagesMC33030PGisela ValdezNo ratings yet
- SAMPLE MCQuestions ByTopicsDocument45 pagesSAMPLE MCQuestions ByTopicsVeeru ManikantaNo ratings yet
- 7 - Monte-Carlo-Simulation With XL STAT - English GuidelineDocument8 pages7 - Monte-Carlo-Simulation With XL STAT - English GuidelineGauravShelkeNo ratings yet
- DTR Testastretta Valve Adjustment ProcedureDocument10 pagesDTR Testastretta Valve Adjustment ProcedureTony LamprechtNo ratings yet
- 53 English Work Book XDocument292 pages53 English Work Book XArun DhawanNo ratings yet
- MLX90614Document44 pagesMLX90614ehsan1985No ratings yet
- L 11Document3 pagesL 11trangNo ratings yet
- TM Mic Opmaint EngDocument186 pagesTM Mic Opmaint Engkisedi2001100% (2)
- Hard DiskDocument9 pagesHard DiskAmarnath SahNo ratings yet
- CycleMax IntroDocument13 pagesCycleMax IntroIslam AtefNo ratings yet
- 12 Step Worksheet With QuestionsDocument26 pages12 Step Worksheet With QuestionsKristinDaigleNo ratings yet
- Ce-Series - TK60981-ML-18 IM - Rev - 0 - 05-13Document96 pagesCe-Series - TK60981-ML-18 IM - Rev - 0 - 05-13VERDADE MUNDIAL GUERRANo ratings yet
- Load Chart Crane LiftingDocument25 pagesLoad Chart Crane LiftingLauren'sclub EnglishBimbel Sd-sma100% (1)
- Clustering Menggunakan Metode K-Means Untuk Menentukan Status Gizi BalitaDocument18 pagesClustering Menggunakan Metode K-Means Untuk Menentukan Status Gizi BalitaAji LaksonoNo ratings yet
- Chapter 01 What Is Statistics?Document18 pagesChapter 01 What Is Statistics?windyuriNo ratings yet
- 2013-01-28 203445 International Fault Codes Eges350 DTCDocument8 pages2013-01-28 203445 International Fault Codes Eges350 DTCVeterano del CaminoNo ratings yet
- Management PriniciplesDocument87 pagesManagement Priniciplesbusyboy_spNo ratings yet
- FIR FliterDocument10 pagesFIR FliterasfsfsafsafasNo ratings yet
- بتول ماجد سعيد (تقرير السيطرة على تلوث الهواء)Document5 pagesبتول ماجد سعيد (تقرير السيطرة على تلوث الهواء)Batool MagedNo ratings yet
- School Based Management Contextualized Self Assessment and Validation Tool Region 3Document29 pagesSchool Based Management Contextualized Self Assessment and Validation Tool Region 3Felisa AndamonNo ratings yet
- Plan Lectie Clasa 5 D HaineDocument5 pagesPlan Lectie Clasa 5 D HaineCristina GrapinoiuNo ratings yet
- The Bio-Based Economy in The NetherlandsDocument12 pagesThe Bio-Based Economy in The NetherlandsIrving Toloache FloresNo ratings yet
- JO 20221109 NationalDocument244 pagesJO 20221109 NationalMark Leo BejeminoNo ratings yet
- Ficha Tecnica Bomba Inyeccion MiniFlex EDocument1 pageFicha Tecnica Bomba Inyeccion MiniFlex Ejohn frader arrubla50% (2)
- Hitachi Vehicle CardDocument44 pagesHitachi Vehicle CardKieran RyanNo ratings yet
- There Will Come Soft RainsDocument8 pagesThere Will Come Soft RainsEng ProfNo ratings yet
- Kübler 5800-5820 - enDocument5 pagesKübler 5800-5820 - enpomsarexnbNo ratings yet
- Dec 2-7 Week 4 Physics DLLDocument3 pagesDec 2-7 Week 4 Physics DLLRicardo Acosta Subad100% (1)
- Template Budget ProposalDocument4 pagesTemplate Budget ProposalimamNo ratings yet
- AYUMJADocument1 pageAYUMJASoumet Das SoumetNo ratings yet
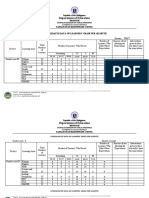
- Department of Education: Consolidated Data On Learners' Grade Per QuarterDocument4 pagesDepartment of Education: Consolidated Data On Learners' Grade Per QuarterUsagi HamadaNo ratings yet