You might also like
- RCC Footing DesignDocument21 pagesRCC Footing Designnitin chaudharyNo ratings yet
- Shear Wall - Design of Shear Wall (Using Staad Pro)Document31 pagesShear Wall - Design of Shear Wall (Using Staad Pro)Djoko Susilo JusupNo ratings yet
- Variation of Which Is Given by The Moody Diagram As:: V RS NDocument3 pagesVariation of Which Is Given by The Moody Diagram As:: V RS NSathyamoorthy VenkateshNo ratings yet
- Typical Drawing 1.5mDocument1 pageTypical Drawing 1.5mssNo ratings yet
- Python For Financial Analysis Ebook 2021Document82 pagesPython For Financial Analysis Ebook 2021Tee Shi Feng100% (1)
- John Titor Time MachineDocument23 pagesJohn Titor Time Machinemiguelangelo1981No ratings yet
- Instrumentation Drawings - St. Elizabeth HospitalDocument23 pagesInstrumentation Drawings - St. Elizabeth HospitalbhabdiNo ratings yet
- York R Series Maintenance PDFDocument34 pagesYork R Series Maintenance PDFmanchau717No ratings yet
- Development of 1.5-Million Pound Thrust M-1 Liquid Hydrogen/Oxygen Rocket EngineDocument406 pagesDevelopment of 1.5-Million Pound Thrust M-1 Liquid Hydrogen/Oxygen Rocket EngineDwayne Day100% (1)
- Slab DesignDocument88 pagesSlab DesignNOORFARAH HUSNA BINTI INTAZALI100% (1)
- C-E's First Welded Steam DrumDocument17 pagesC-E's First Welded Steam DrumIpong Darma Putra TambaNo ratings yet
- A History of Feudal Mills and the Late Richard BennettDocument256 pagesA History of Feudal Mills and the Late Richard BennettoceanpinkNo ratings yet
- Portfolio Schirone 2020 PDFDocument28 pagesPortfolio Schirone 2020 PDFEmanuela SchironeNo ratings yet
- 76 Notes On Numerical Fluid Mechanics (NNFM)Document382 pages76 Notes On Numerical Fluid Mechanics (NNFM)VipinBaislaNo ratings yet
- Las Cartas Nauticas de La Escuela Cartográfica MallorquinaDocument12 pagesLas Cartas Nauticas de La Escuela Cartográfica MallorquinaDret Foral Civil ValenciàNo ratings yet
- Thermodynamics-Full-Catalogue PDFDocument136 pagesThermodynamics-Full-Catalogue PDFKhalid Al-JanabiNo ratings yet
- TM 5-2036 (Pump, Centrifugal 1.5 Discharge, 125 G.P.M. 300 PDFDocument127 pagesTM 5-2036 (Pump, Centrifugal 1.5 Discharge, 125 G.P.M. 300 PDFferdockmNo ratings yet
- 500 Years of Graphical and Symbolical Representation On Marine ChartsDocument13 pages500 Years of Graphical and Symbolical Representation On Marine ChartsManuel CapdevilaNo ratings yet
- Aerodynamic Performance Analysis of A Winged Re-Entry Vehicle From Hypersonic Down To Subsonic SpeedDocument15 pagesAerodynamic Performance Analysis of A Winged Re-Entry Vehicle From Hypersonic Down To Subsonic Speedaoyon100% (1)
- 10 Development of A High Performance Centrifugal Compressor Using A 3D Inverse Design TechniqueDocument11 pages10 Development of A High Performance Centrifugal Compressor Using A 3D Inverse Design TechniqueSubhash PadmanabhanNo ratings yet
- Chapter 5ADocument38 pagesChapter 5Amaninder_khasria100% (2)
- Paper No.: 13 Marine Distillate Fuels Specifications - Today and TomorrowDocument10 pagesPaper No.: 13 Marine Distillate Fuels Specifications - Today and TomorrowAnonymous 8qUHG4SlNo ratings yet
- Mermin Bad HabitDocument2 pagesMermin Bad HabitNikos Paizis100% (3)
- Use of CFD Methods For Hullform Ion in A Model BasinDocument11 pagesUse of CFD Methods For Hullform Ion in A Model Basinseckin80No ratings yet
- Study On Thin Airfoil Theory Performance Test of EDocument10 pagesStudy On Thin Airfoil Theory Performance Test of ENguyen Danh HauNo ratings yet
- These Is On Turbopump.Document44 pagesThese Is On Turbopump.Madhusudan SharmaNo ratings yet
- The Map and The Development of The History of Cartography: HarleyDocument9 pagesThe Map and The Development of The History of Cartography: HarleycherNo ratings yet
- Theory and Experiment ProcedureDocument25 pagesTheory and Experiment ProcedureNazrul HafizNo ratings yet
- H-1 Rocket Engine Technical ManualDocument78 pagesH-1 Rocket Engine Technical ManualrobsonhahnNo ratings yet
- Trim Optimisation - Theory and PracticeDocument6 pagesTrim Optimisation - Theory and Practicepoker12345No ratings yet
- TM 9 230 001 Machine Gun Mounts 1943Document62 pagesTM 9 230 001 Machine Gun Mounts 1943rjwgdiNo ratings yet
- Thesis - Phengxiong - Final Submission - 25.02.2020Document202 pagesThesis - Phengxiong - Final Submission - 25.02.2020Pheng XiongNo ratings yet
- T-340PL Prime Line PartsDocument144 pagesT-340PL Prime Line PartsMichael Doogie Alburqueque ParedesNo ratings yet
- MARINE 2011, IV International Conference On Computational Methods in Marine EngineeringDocument278 pagesMARINE 2011, IV International Conference On Computational Methods in Marine EngineeringYuriyAKNo ratings yet
- Excel 4.0 Macro Functions Reference PDFDocument653 pagesExcel 4.0 Macro Functions Reference PDFSatyendra SinghNo ratings yet
- 2020 - Interactive Ecommerce-1 PDFDocument53 pages2020 - Interactive Ecommerce-1 PDFTee Shi FengNo ratings yet
- Technical Matters 1Document12 pagesTechnical Matters 1Şansal DikmenerNo ratings yet
- Investigation On Drag Force Reduction by Aerospikes Using CFDDocument8 pagesInvestigation On Drag Force Reduction by Aerospikes Using CFDMohammedrafficNo ratings yet
- Tripartite2015 Session6d LRPedersen BIMCODocument14 pagesTripartite2015 Session6d LRPedersen BIMCObritties69No ratings yet
- Science DLLDocument6 pagesScience DLLJEVACLAIR SALVACIONNo ratings yet
- Hazop Surface Gas and Mud Handling Systems During Drilling OperationsDocument14 pagesHazop Surface Gas and Mud Handling Systems During Drilling OperationsTee Shi FengNo ratings yet
- A Mathematical Model For Predicting Fire Spread in Wildland FuelsDocument48 pagesA Mathematical Model For Predicting Fire Spread in Wildland FuelsSaksham AgarwalNo ratings yet
- Supercavitating Propellers PDFDocument41 pagesSupercavitating Propellers PDFAlex FatecNo ratings yet
- Cavitation PhotographsDocument6 pagesCavitation PhotographsgsmilebamNo ratings yet
- Cavitation Tunnel Tests & Research at EL PARDO Model BasinDocument2 pagesCavitation Tunnel Tests & Research at EL PARDO Model BasinDavid AmayaNo ratings yet
- Cavitation Effects on HydrofoilsDocument13 pagesCavitation Effects on HydrofoilsNaresh JirelNo ratings yet
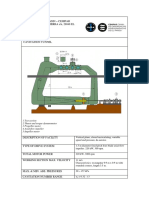
- BWModular House APN44-45 - Submission 15Feb2021-1-CEDocument12 pagesBWModular House APN44-45 - Submission 15Feb2021-1-CEMunfaridNo ratings yet
- Air Flow ReportDocument6 pagesAir Flow ReportLuke jaggerNo ratings yet
- Verification of CFD Based Computation of Thermal Comfort IndicesDocument16 pagesVerification of CFD Based Computation of Thermal Comfort IndicesWill MunnyNo ratings yet
- CFD - AssignmentDocument2 pagesCFD - AssignmentpadmanathanNo ratings yet
- A Multi-Phase Particle Shifting AlgorithmDocument68 pagesA Multi-Phase Particle Shifting AlgorithmAnonymous HijNGQtNNo ratings yet
- Cavitation ArndtDocument56 pagesCavitation ArndtWilliamNo ratings yet
- Greasing PlanDocument17 pagesGreasing Planmarkonis1983No ratings yet
- Agard CFD PDFDocument492 pagesAgard CFD PDFVinoth NagarajNo ratings yet
- Results and Discussionexp1Document4 pagesResults and Discussionexp1Vince PaelmoNo ratings yet
- A Test Protocol For Room-to-Room Distribution of Outside Air by Residential Ventilation SystemsDocument63 pagesA Test Protocol For Room-to-Room Distribution of Outside Air by Residential Ventilation SystemsRabindra SinghNo ratings yet
- Design, Cavitation Performance, and Open-WaterDocument41 pagesDesign, Cavitation Performance, and Open-WateraminNo ratings yet
- 37.bioclimatic ChartDocument1 page37.bioclimatic ChartmariyaNo ratings yet
- Wal Correction AgardDocument552 pagesWal Correction AgardSrinivasan SiddhamoorthyNo ratings yet
- TMC 2007 Technical BackgroundDocument27 pagesTMC 2007 Technical Backgroundluigi_mattoNo ratings yet
- Significance of Air Movement For Thermal Comfort in Warm ClimatesIndragantiDocument15 pagesSignificance of Air Movement For Thermal Comfort in Warm ClimatesIndragantiAmit MendirattaNo ratings yet
- Bioclimatic ChartDocument15 pagesBioclimatic ChartCarolina MacielNo ratings yet
- Agard - Heat Transfer and Cooling in Gas Turbines PDFDocument497 pagesAgard - Heat Transfer and Cooling in Gas Turbines PDFRadek WasilewskiNo ratings yet
- Parametric Design of Rocket Engine Turbopumps With Genetic AlgorithmsDocument5 pagesParametric Design of Rocket Engine Turbopumps With Genetic Algorithmsjoojoo987654321No ratings yet
- Application of Thermal Comfort Indices To Outdoor Urban Settings Using Rayman ModelDocument9 pagesApplication of Thermal Comfort Indices To Outdoor Urban Settings Using Rayman ModelffontanesiNo ratings yet
- Finals Hanjin Hull PN0087-0091 Air Compressor 41009068Document35 pagesFinals Hanjin Hull PN0087-0091 Air Compressor 41009068FILIN VLADIMIRNo ratings yet
- Turbulent Buoyant Jets and Plumes: HMT: The Science & Applications of Heat and Mass Transfer. Reports, Reviews & Computer ProgramsFrom EverandTurbulent Buoyant Jets and Plumes: HMT: The Science & Applications of Heat and Mass Transfer. Reports, Reviews & Computer ProgramsNo ratings yet
- Oguz_OE2017_Experimental_and_numerical_analysis_of_a_TLP_floating_offshoreDocument39 pagesOguz_OE2017_Experimental_and_numerical_analysis_of_a_TLP_floating_offshoreStevenNo ratings yet
- 7 Leading Machine Learning Use CasesDocument11 pages7 Leading Machine Learning Use CasesUGNo ratings yet
- What Are Comorbidities-And How Do They Affect COVID-19Document1 pageWhat Are Comorbidities-And How Do They Affect COVID-19Tee Shi FengNo ratings yet
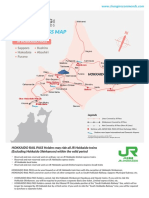
- HokkaidocontentmapDocument1 pageHokkaidocontentmapTee Shi FengNo ratings yet
- Japan Vacations Adventures by DisneyDocument23 pagesJapan Vacations Adventures by DisneyTee Shi FengNo ratings yet
- 01 The Web Developer Bootcamp PDFDocument9 pages01 The Web Developer Bootcamp PDFEnrique Mejia FlorezNo ratings yet
- Overview of Today's Class: 15.010: Economic Analysis For Business DecisionsDocument9 pagesOverview of Today's Class: 15.010: Economic Analysis For Business DecisionsHein Thu AungNo ratings yet
- Power of The Ocean 2 With AfL EnglishDocument33 pagesPower of The Ocean 2 With AfL EnglishTee Shi FengNo ratings yet
- Main Riser Pull-In Winch: Refernce For CalculationsDocument1 pageMain Riser Pull-In Winch: Refernce For CalculationsTee Shi FengNo ratings yet
- DPS O&m Manual 100576Document42 pagesDPS O&m Manual 100576Tee Shi FengNo ratings yet
- Steering and Stabilisation Brochure PDFDocument24 pagesSteering and Stabilisation Brochure PDFhihihiNo ratings yet
- DIN 55474 Calculation Moisture Protection ElectronicsDocument3 pagesDIN 55474 Calculation Moisture Protection ElectronicsTee Shi FengNo ratings yet
- Mcgregor Steering GearDocument2 pagesMcgregor Steering GearTee Shi FengNo ratings yet
- Elegance-Ducted-19 11 19Document2 pagesElegance-Ducted-19 11 19Tee Shi FengNo ratings yet
- True vs. Apparent PowerDocument9 pagesTrue vs. Apparent PowerAnonymous 9feJpOwNo ratings yet
- L3 Steering Gear PDFDocument4 pagesL3 Steering Gear PDFTee Shi FengNo ratings yet
- Bop Mux Control System - OeaneeringDocument9 pagesBop Mux Control System - OeaneeringTee Shi FengNo ratings yet
- Use of The Dual-Activity Drillship As A Field Development ToolDocument15 pagesUse of The Dual-Activity Drillship As A Field Development ToolTee Shi FengNo ratings yet
- Time-Domain Coupled Analysis of Deepwater TLP, and Verification Against Model TestsDocument8 pagesTime-Domain Coupled Analysis of Deepwater TLP, and Verification Against Model TestsTee Shi FengNo ratings yet
- Prediction of TLP Responses Model Tests Vs AnalysisDocument16 pagesPrediction of TLP Responses Model Tests Vs AnalysisTee Shi FengNo ratings yet
- TLP Hull - Tendon - Riser Coupled Dynamic Analysis in Deepwater PDFDocument7 pagesTLP Hull - Tendon - Riser Coupled Dynamic Analysis in Deepwater PDFZylyn KuaNo ratings yet
- Surge Motion of Mini TLP in Random Seas - Comparison Between Experiment and TheoryDocument8 pagesSurge Motion of Mini TLP in Random Seas - Comparison Between Experiment and TheoryTee Shi FengNo ratings yet
- Impact of Coupled Analysis On Global Performance of Deep Water Tlp'sDocument14 pagesImpact of Coupled Analysis On Global Performance of Deep Water Tlp'sTee Shi FengNo ratings yet
- TLP Rigid Riser Case StudyDocument6 pagesTLP Rigid Riser Case StudyTee Shi FengNo ratings yet
- Matterhorn Steel Catenary Risers Critical Issues and Lessons Learned For Reel-Layed SCRs To A TLPDocument16 pagesMatterhorn Steel Catenary Risers Critical Issues and Lessons Learned For Reel-Layed SCRs To A TLPTee Shi FengNo ratings yet
- Integrated Global Performance Analysis of Matterhorn SeaStar TLPDocument11 pagesIntegrated Global Performance Analysis of Matterhorn SeaStar TLPTee Shi FengNo ratings yet
- Perfiles Pesos y NomenglaturasDocument32 pagesPerfiles Pesos y NomenglaturasErick Ccari TapiaNo ratings yet
- Mech 343 Lab Report 1Document22 pagesMech 343 Lab Report 1Yousef MeguidNo ratings yet
- Theory of Crystallization PDFDocument26 pagesTheory of Crystallization PDFAtik Faysal Ayon50% (2)
- ISSMGE Combined Pile-Raft Foundation Guideline: July 2013Document29 pagesISSMGE Combined Pile-Raft Foundation Guideline: July 2013Chandu ManneNo ratings yet
- 1 - MOM Lab Manual CorrectDocument58 pages1 - MOM Lab Manual Correctmursalinme123No ratings yet
- Gaussian UnitsDocument9 pagesGaussian UnitsKapila WijayaratneNo ratings yet
- Heat TransferDocument42 pagesHeat TransferKundan KumarNo ratings yet
- Physics - Speed of Sound Worksheet - CompleteDocument3 pagesPhysics - Speed of Sound Worksheet - CompletePrasanna PatilNo ratings yet
- ADocument2 pagesAsardarsndi96No ratings yet
- E303 Transverse WaveDocument6 pagesE303 Transverse WaveApril SaccuanNo ratings yet
- Retaining Wall Analysis & Design (EN1992 H-2.5mDocument15 pagesRetaining Wall Analysis & Design (EN1992 H-2.5mMirsad ČorbadžićNo ratings yet
- Review: The Theoretical Strength of SolidsDocument16 pagesReview: The Theoretical Strength of SolidsDiego AvendañoNo ratings yet
- For Exchanger Tube Rupture PDFDocument3 pagesFor Exchanger Tube Rupture PDFNikhil DivateNo ratings yet
- Compound Epicyclic Gear TrainsDocument5 pagesCompound Epicyclic Gear TrainsSezgin BayrakNo ratings yet
- Review of Fluid Review of Fluid MechanicsDocument40 pagesReview of Fluid Review of Fluid MechanicsNebiyou KorraNo ratings yet
- Numerical Modeling of Elasto - Viscoplastic Chaboche Constitutive Equations Using MSC - MarcDocument10 pagesNumerical Modeling of Elasto - Viscoplastic Chaboche Constitutive Equations Using MSC - MarcPcelica PcelićNo ratings yet
- Bulletin 504 Bureau of Mines-ADocument52 pagesBulletin 504 Bureau of Mines-ArvsinghNo ratings yet
- 10c-Electrostatics MC Practice Problems-ANSWERSDocument10 pages10c-Electrostatics MC Practice Problems-ANSWERSJanel EdwardsNo ratings yet
- WORKPART TRANSFER METHODSDocument7 pagesWORKPART TRANSFER METHODSAnonymous MZRzaxFgVLNo ratings yet
- The Ideal Gas Law - Chemistry LibreTextsDocument8 pagesThe Ideal Gas Law - Chemistry LibreTextsJovenil BacatanNo ratings yet
- Calculation of Temperature Rise in Calorimetry: A Simple AccountDocument4 pagesCalculation of Temperature Rise in Calorimetry: A Simple AccountDaniel AriasNo ratings yet
- IR Spectroscopy Basics - Part 1Document17 pagesIR Spectroscopy Basics - Part 1Dan GuerreroNo ratings yet
- Module 1 - Introduction To FoundationDocument73 pagesModule 1 - Introduction To FoundationKerwin BadmanNo ratings yet