You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- I-Vu Link Overview and Configuration 808-891r1Document679 pagesI-Vu Link Overview and Configuration 808-891r1abuMalakNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Material ComparisonDocument1 pageMaterial ComparisonNoir HamannNo ratings yet
- Sensor Actuator T211Document22 pagesSensor Actuator T211Noir HamannNo ratings yet
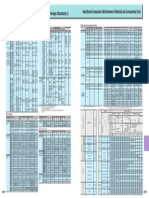
- International Material Grade Comparison TableDocument9 pagesInternational Material Grade Comparison Tablenyamuk06100% (4)
- 001 TXP Siemens 2007 EnglishDocument49 pages001 TXP Siemens 2007 EnglishwalterbishopNo ratings yet
- Process Control NotesDocument178 pagesProcess Control Notesabdulrhman aljuaydi100% (1)
- Skills, Rules, and Knowledge Signals, Signs, and Symbols, and Other Distinctions in Human Performance ModelsDocument10 pagesSkills, Rules, and Knowledge Signals, Signs, and Symbols, and Other Distinctions in Human Performance Modelsjvalle26498No ratings yet
- Power Spectral DensityDocument18 pagesPower Spectral DensityNoir HamannNo ratings yet
- PneumaticTire - HS 810 561Document707 pagesPneumaticTire - HS 810 561Scott KimbroughNo ratings yet
- Motion Related Comfort in Tilting TrainsDocument68 pagesMotion Related Comfort in Tilting TrainsNoir HamannNo ratings yet
- A Study On The Contact Force Between Catenary and PantographDocument6 pagesA Study On The Contact Force Between Catenary and PantographNoir Hamann100% (1)
- BIOS Update ProceduresDocument6 pagesBIOS Update ProceduresNoir HamannNo ratings yet
- Inspection: 1. Charcoal Canister AssyDocument5 pagesInspection: 1. Charcoal Canister AssyNoir HamannNo ratings yet
- Brake Fluid PDFDocument2 pagesBrake Fluid PDFNoir HamannNo ratings yet
- Inspection: - Ignition SystemDocument2 pagesInspection: - Ignition SystemNoir HamannNo ratings yet
- Hints CastingDocument1 pageHints CastingNoir HamannNo ratings yet
- ValVue 2 Instruction ManualDocument157 pagesValVue 2 Instruction ManualMoises Alejandro Ordoñez GuerraNo ratings yet
- DTB Manual enDocument2 pagesDTB Manual enparithi1987No ratings yet
- Compensation DesignDocument24 pagesCompensation Designarohianand27100908No ratings yet
- Montalvo 2018 Brochure Us e PDFDocument24 pagesMontalvo 2018 Brochure Us e PDFdorin serbanNo ratings yet
- Simulation of Electro-Hydraulic Servo Actuator PDFDocument73 pagesSimulation of Electro-Hydraulic Servo Actuator PDFstrafforNo ratings yet
- On The Misunderstanding of The Ziegler-Nichols's Formulae UsageDocument6 pagesOn The Misunderstanding of The Ziegler-Nichols's Formulae UsageJuan Manuel Uceda PérezNo ratings yet
- Me 471 Continuous and Discrete Transfer FunctionsDocument3 pagesMe 471 Continuous and Discrete Transfer FunctionsJawad Khan YousafzaiNo ratings yet
- Fundamentals of Numerical Control: Modul 11 MK. CAD/CAM/CAE Dosen: Dr. Ir. Sally Cahyati MTDocument40 pagesFundamentals of Numerical Control: Modul 11 MK. CAD/CAM/CAE Dosen: Dr. Ir. Sally Cahyati MTFajar BahariNo ratings yet
- Control BookDocument422 pagesControl BookFilipe Gama FreireNo ratings yet
- SHZF - SCR ManualDocument48 pagesSHZF - SCR ManualVADIVEL A.K.No ratings yet
- B - Lecture3 The Transfer Function and Block Diagram Automatic Control SystemDocument21 pagesB - Lecture3 The Transfer Function and Block Diagram Automatic Control SystemAbaziz Mousa OutlawZz100% (1)
- Final Project Report: PID Control Using Arduino UNO MicrocontrollerDocument19 pagesFinal Project Report: PID Control Using Arduino UNO MicrocontrollerSujeet PawarNo ratings yet
- Tuning of PID Controller Using Conventional and Meta-Heuristic Technique For AVR SystemDocument4 pagesTuning of PID Controller Using Conventional and Meta-Heuristic Technique For AVR Systemrathorsumit2006No ratings yet
- Autotuning Fuzzy PID Controller For Speed Control of BLDC MotorDocument8 pagesAutotuning Fuzzy PID Controller For Speed Control of BLDC MotorZikra ElninoNo ratings yet
- Online GuideDocument2 pagesOnline Guidealejandro perezNo ratings yet
- Group 1 PRESENTATION FIR AND IIR FILTERSDocument23 pagesGroup 1 PRESENTATION FIR AND IIR FILTERSGivenet MakosaNo ratings yet
- Syllabus GTU PDFDocument3 pagesSyllabus GTU PDFkalpesh_chandakNo ratings yet
- A Mathematical Approach To Control System PDFDocument666 pagesA Mathematical Approach To Control System PDFFatima Om SalmanNo ratings yet
- Modeling Phase-Locked Loops Using VerilogDocument11 pagesModeling Phase-Locked Loops Using VerilogBouhafs AbdelkaderNo ratings yet
- TRUETIME Real-Time Control System Simulation With MATLAB - SimulinkDocument6 pagesTRUETIME Real-Time Control System Simulation With MATLAB - SimulinkmpllNo ratings yet
- PID For Dummies: SearchDocument13 pagesPID For Dummies: SearchChinmoy DasNo ratings yet
- CHAPTER 1 Sistem KendaliDocument35 pagesCHAPTER 1 Sistem KendaliRickyNo ratings yet
- Hec Pakistan (Electrical Engineering - Course Outline)Document53 pagesHec Pakistan (Electrical Engineering - Course Outline)aamir_janjua_3No ratings yet
- Feedback Control Systemsion IntroductionDocument29 pagesFeedback Control Systemsion Introductionzxzxzx207No ratings yet
- P20 IIR Filters Part3Document33 pagesP20 IIR Filters Part3Harold GealanNo ratings yet
- Data-Driven Discovery of Koopman Eigenfunctions For Control: Eurika Kaiser, J. Nathan Kutz, and Steven L. BruntonDocument36 pagesData-Driven Discovery of Koopman Eigenfunctions For Control: Eurika Kaiser, J. Nathan Kutz, and Steven L. BruntonIlyasNo ratings yet