You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Practical Exercise Epipolar GeometryDocument3 pagesPractical Exercise Epipolar GeometrydansileshiNo ratings yet
- The Finite Element Method (Fem) : 1.1 Galerkin FormulationDocument13 pagesThe Finite Element Method (Fem) : 1.1 Galerkin FormulationCarlos Gulbenkian GaldamesNo ratings yet
- Tensile Testing Apparatus Design with 220000 N Load LimitDocument5 pagesTensile Testing Apparatus Design with 220000 N Load LimitMunir EffendyNo ratings yet
- Corning CRN 24 ALTOS 24FDocument3 pagesCorning CRN 24 ALTOS 24FSosialNo ratings yet
- DS-500 Series Weighing ScaleDocument1 pageDS-500 Series Weighing ScaleAntmavrNo ratings yet
- Determine pKa of Potassium Hydrogen Phthalate via Potentiometric TitrationDocument5 pagesDetermine pKa of Potassium Hydrogen Phthalate via Potentiometric TitrationSheenly Anne SaavedraNo ratings yet
- MA STEM Grade 8 Practice Test GuideDocument30 pagesMA STEM Grade 8 Practice Test GuideRG Emmanuel TesaNo ratings yet
- Precast Bridge DeckDocument4 pagesPrecast Bridge DeckPaul_delgadoNo ratings yet
- Numerical Methods in Rock MechanicsDocument24 pagesNumerical Methods in Rock Mechanicsali100% (2)
- Experiment 08 Simple PendulumDocument8 pagesExperiment 08 Simple PendulumAnonymous rswF6CNo ratings yet
- Unit 2 MCB Key PDFDocument19 pagesUnit 2 MCB Key PDFDafne Fertig88% (32)
- Ubc 2011 Fall Vakili SoheylDocument193 pagesUbc 2011 Fall Vakili Soheyl조기현No ratings yet
- Homogeneous CoordinatesDocument27 pagesHomogeneous CoordinatesGogyNo ratings yet
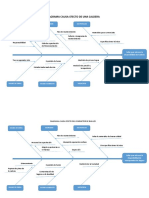
- Caldera causa-efecto diagrama mantenimiento fallasDocument2 pagesCaldera causa-efecto diagrama mantenimiento fallasDaniel Will Morales GuerreroNo ratings yet
- FHWA Drilled Shafts Construction Procedures and LRFD Design Methods APP-CDocument14 pagesFHWA Drilled Shafts Construction Procedures and LRFD Design Methods APP-CmalangpeerNo ratings yet
- Theoretical Physics 1: Brwebberandchwbarnes Michaelmas Term 2008Document73 pagesTheoretical Physics 1: Brwebberandchwbarnes Michaelmas Term 200821260paco61No ratings yet
- Lab Report 2Document3 pagesLab Report 2ChristianNo ratings yet
- Analysis of A Primary Suspension Spring Used in LocomotivesDocument4 pagesAnalysis of A Primary Suspension Spring Used in Locomotivesdhanalakshmi k sNo ratings yet
- Price ListDocument3 pagesPrice ListkiaangelieNo ratings yet
- Chapter 4Document9 pagesChapter 4dearsaswatNo ratings yet
- Study On Torsional Stiffness of Engine CrankshaftDocument5 pagesStudy On Torsional Stiffness of Engine CrankshaftBestin VargheseNo ratings yet
- Take Home AssignmentDocument3 pagesTake Home AssignmentNadia FadhilaNo ratings yet
- V Notch PracticalDocument13 pagesV Notch PracticalAnushaBheenuck0% (2)
- OuzineDocument4 pagesOuzineNima ArvinNo ratings yet
- Guia ExensDocument16 pagesGuia ExensPedro Betancourt100% (1)
- ISO 8573 Purity Classes PDFDocument1 pageISO 8573 Purity Classes PDFOky Andytya PratamaNo ratings yet
- Water Analysis Volume IIDocument16 pagesWater Analysis Volume IIRaphael Belano BrionesNo ratings yet
- Organic Matter's Role in Copper ComplexationDocument208 pagesOrganic Matter's Role in Copper ComplexationEveltonNo ratings yet
- ME424 201516 Unit2Document29 pagesME424 201516 Unit2harsha100% (1)
- Advances in Phased Array Compound S-Scan DesignDocument18 pagesAdvances in Phased Array Compound S-Scan Designhcmcrlho100% (1)