You might also like
- Partitioning An ASICDocument6 pagesPartitioning An ASICSwtz ZraonicsNo ratings yet
- Single Chip Solution: Implementation of Soft Core Microcontroller Logics in FPGADocument4 pagesSingle Chip Solution: Implementation of Soft Core Microcontroller Logics in FPGAInternational Organization of Scientific Research (IOSR)No ratings yet
- Arduino-Based Embedded System ModuleDocument8 pagesArduino-Based Embedded System ModuleIJRASETPublicationsNo ratings yet
- SOC TestingDocument27 pagesSOC TestingMaria AllenNo ratings yet
- 2.sys Bus ArchDocument14 pages2.sys Bus ArchChar MondeNo ratings yet
- Unit 1 Computer ArchitectureDocument36 pagesUnit 1 Computer ArchitectureAnshulNo ratings yet
- Chapter 8 - CPU PerformanceDocument40 pagesChapter 8 - CPU PerformanceNurhidayatul FadhilahNo ratings yet
- ASIC TimingDocument54 pagesASIC TimingKrishna MohanNo ratings yet
- VLSI DESIGN Lab Manual Verilog+l-EditDocument55 pagesVLSI DESIGN Lab Manual Verilog+l-Editmario sanchezNo ratings yet
- DDR SDR Sdram ComparisionDocument12 pagesDDR SDR Sdram ComparisionSrinivas CherukuNo ratings yet
- Atrenta Tutorial PDFDocument15 pagesAtrenta Tutorial PDFTechy GuysNo ratings yet
- DVD2 JNTU Set1 SolutionsDocument12 pagesDVD2 JNTU Set1 Solutionsకిరణ్ కుమార్ పగడాలNo ratings yet
- 03b - FIE - Parcial #3 PLD - Resumen 04c 09Document36 pages03b - FIE - Parcial #3 PLD - Resumen 04c 09amilcar93No ratings yet
- Project FileDocument131 pagesProject FileshaanjalalNo ratings yet
- tc1 6 Architecture Vol1Document225 pagestc1 6 Architecture Vol1Neelakandan Natarajan100% (1)
- Register Transfer Methodology: PrincipleDocument25 pagesRegister Transfer Methodology: PrincipleKhalidTaherAl-HussainiNo ratings yet
- Introduction To System On ChipDocument110 pagesIntroduction To System On ChipKiệt PhạmNo ratings yet
- Introduction To The I/O Buses Technical and Historical Background For The I/O BusesDocument9 pagesIntroduction To The I/O Buses Technical and Historical Background For The I/O BusesshankyguptaNo ratings yet
- Buffer InsertionDocument47 pagesBuffer InsertionAkshay DesaiNo ratings yet
- 5 - Internal MemoryDocument22 pages5 - Internal Memoryerdvk100% (1)
- CPFDocument47 pagesCPFcknishuNo ratings yet
- BGK MPMC Unit-3 Q and ADocument21 pagesBGK MPMC Unit-3 Q and AMallesh ArjaNo ratings yet
- Organization: Basic Computer Organization and DesignDocument29 pagesOrganization: Basic Computer Organization and DesignGemechisNo ratings yet
- FSM Implementations: TIE-50206 Logic Synthesis Arto Perttula Tampere University of Technology Fall 2017Document25 pagesFSM Implementations: TIE-50206 Logic Synthesis Arto Perttula Tampere University of Technology Fall 2017antoniocljNo ratings yet
- Chapter 7: Register Transfer: ObjectivesDocument7 pagesChapter 7: Register Transfer: ObjectivesSteffany RoqueNo ratings yet
- System On Chip SoC ReportDocument14 pagesSystem On Chip SoC Reportshahd dawood100% (1)
- Register and Its OperationsDocument56 pagesRegister and Its OperationsSARTHAK VARSHNEYNo ratings yet
- VHDL 4 RTL ModelsDocument33 pagesVHDL 4 RTL ModelsNguyễn Minh NghĩaNo ratings yet
- Unit - IV: Input - OutputDocument50 pagesUnit - IV: Input - Outputkarvind08No ratings yet
- Image Cryptography Design Based On Nano AES Security AlgorithmDocument6 pagesImage Cryptography Design Based On Nano AES Security AlgorithmIJRASETPublicationsNo ratings yet
- NBB - Module II - System PartitioingDocument60 pagesNBB - Module II - System Partitioing20D076 SHRIN BNo ratings yet
- Low Power VLSI Design: J.Ramesh ECE Department PSG College of TechnologyDocument146 pagesLow Power VLSI Design: J.Ramesh ECE Department PSG College of TechnologyVijay Kumar TNo ratings yet
- Chapter 6 - IO (Part 2)Document42 pagesChapter 6 - IO (Part 2)Nurhidayatul FadhilahNo ratings yet
- Bus System & Data TransferDocument5 pagesBus System & Data Transferlmehta16No ratings yet
- Seer VerilogDocument59 pagesSeer VerilogSindhu RajanNo ratings yet
- Rs-232 To I2c Protocol ConverterDocument4 pagesRs-232 To I2c Protocol ConverterHarsha100% (2)
- Asic Prototyping AldecDocument10 pagesAsic Prototyping AldecKhaled Abou ElseoudNo ratings yet
- Microprocessor Design: Simple As Possible-2Document36 pagesMicroprocessor Design: Simple As Possible-2Pantino JoshuaNo ratings yet
- ARM Based Development Course Summary-MouliSankaranDocument39 pagesARM Based Development Course Summary-MouliSankaranChandramouleeswaran SankaranNo ratings yet
- DSD 12 Synchronous DesignDocument9 pagesDSD 12 Synchronous DesignDavis AbrahamNo ratings yet
- 05 Systemc TutorialDocument32 pages05 Systemc TutorialjasonturfNo ratings yet
- Haps-54 March2009 ManualDocument74 pagesHaps-54 March2009 Manualjohn92691No ratings yet
- Commands Used in Soc Workshop PDFDocument16 pagesCommands Used in Soc Workshop PDFabhishek bhandareNo ratings yet
- UG0586 User Guide RTG4 FPGA Clocking ResourcesDocument82 pagesUG0586 User Guide RTG4 FPGA Clocking ResourcesNguyen Van ToanNo ratings yet
- Lecture 5 - Combinatorial and Sequential LogicDocument76 pagesLecture 5 - Combinatorial and Sequential LogicantoniocljNo ratings yet
- Implementing A Source Synchronous Interface v2.0Document47 pagesImplementing A Source Synchronous Interface v2.0Gautham PopuriNo ratings yet
- SDC PDFDocument2 pagesSDC PDFCharan UkkuNo ratings yet
- Advanced Processor SuperscalarclassDocument73 pagesAdvanced Processor SuperscalarclassKanaga Varatharajan50% (2)
- IC-Project I-SynthesisDocument7 pagesIC-Project I-SynthesisStudentNo ratings yet
- Introduction To Asics: Ni Logic Pvt. LTD., PuneDocument84 pagesIntroduction To Asics: Ni Logic Pvt. LTD., PuneankurNo ratings yet
- Build A Simple Computer: Lecturer: Pazir AhmadDocument80 pagesBuild A Simple Computer: Lecturer: Pazir AhmadfayeqNo ratings yet
- Vi For Smaties Linux EditorDocument10 pagesVi For Smaties Linux EditorSandeep ChaudharyNo ratings yet
- Complex Clocking Situations 010904Document54 pagesComplex Clocking Situations 010904maniNo ratings yet
- 10 Hymel Conger AbstractDocument2 pages10 Hymel Conger AbstractTamiltamil TamilNo ratings yet
- Fpga Implementation of Digital FiltersDocument9 pagesFpga Implementation of Digital FiltersMiguel PanduroNo ratings yet
- UVM Questions and AnswersDocument10 pagesUVM Questions and AnswersSambhav Verman100% (1)
- DocumentDocument8 pagesDocumentShamsher SinghNo ratings yet
- SoC Design - A ReviewDocument131 pagesSoC Design - A ReviewSambhav VermanNo ratings yet
- Cache 3 Associativity HandoutDocument1 pageCache 3 Associativity HandoutSambhav VermanNo ratings yet
- Cache Coherence Protocols: Evaluation Using A Multiprocessor Simulation ModelDocument26 pagesCache Coherence Protocols: Evaluation Using A Multiprocessor Simulation ModelSambhav VermanNo ratings yet
- Consistency vs. Coherence: Example: Two Processors Are Synchronizing On A Variable CalledDocument12 pagesConsistency vs. Coherence: Example: Two Processors Are Synchronizing On A Variable CalledSambhav VermanNo ratings yet
- Boundary-Scan DFT GuidelinesDocument63 pagesBoundary-Scan DFT GuidelinesSambhav VermanNo ratings yet
- Lowering Power Consumption in Clock by Using Globally Asynchronous Locally Synchronous Design StyleDocument6 pagesLowering Power Consumption in Clock by Using Globally Asynchronous Locally Synchronous Design StyleSambhav VermanNo ratings yet
- UVM Questions and AnswersDocument10 pagesUVM Questions and AnswersSambhav Verman100% (1)
- Zynq 7000 TRMDocument1,770 pagesZynq 7000 TRMSambhav VermanNo ratings yet
- Intel Architecture ManualDocument1,386 pagesIntel Architecture ManualSambhav VermanNo ratings yet
- Embedded System Manual Xilinx 14.4Document282 pagesEmbedded System Manual Xilinx 14.4Sambhav VermanNo ratings yet
- Dynamic ReconfigurationDocument12 pagesDynamic ReconfigurationSambhav VermanNo ratings yet
- User Guide 20Document212 pagesUser Guide 20Gagan ChopraNo ratings yet
- Case WesternDocument4 pagesCase WesternSambhav VermanNo ratings yet
- CELL HandbookDocument884 pagesCELL HandbookSambhav VermanNo ratings yet
- Uvm Users Guide 1.1Document198 pagesUvm Users Guide 1.1boojahNo ratings yet
- HashingDocument2 pagesHashingSambhav VermanNo ratings yet
- Experiment 3 Algorithmic State Machines (Asm) PURPOSE: Getting Acquainted With ASM ChartsDocument6 pagesExperiment 3 Algorithmic State Machines (Asm) PURPOSE: Getting Acquainted With ASM ChartsAr-Jay MadejaNo ratings yet
- Mux 2700Document16 pagesMux 2700obioji100% (1)
- Chapter3 - Basic Processing UnitDocument47 pagesChapter3 - Basic Processing UnitPraveen AlapatiNo ratings yet
- Cao Class NotesDocument16 pagesCao Class NotesPavan KalyanNo ratings yet
- Digital Circuits MultiplexersDocument7 pagesDigital Circuits MultiplexersSUPRIYA KUMBHAKARANNo ratings yet
- Sistemas de Potencia Dodge DurangoDocument244 pagesSistemas de Potencia Dodge Durangomatias quezadaNo ratings yet
- Adtt 16 eDocument2 pagesAdtt 16 enicomaraNo ratings yet
- Snake GameDocument13 pagesSnake GameRaj Shekar50% (2)
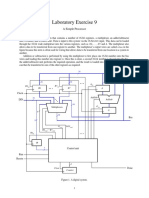
- Laboratory Exercise 9: A Simple ProcessorDocument8 pagesLaboratory Exercise 9: A Simple ProcessorhxchNo ratings yet
- Examination 2 - CPLD, VHDL & Combinational LogicDocument9 pagesExamination 2 - CPLD, VHDL & Combinational LogicamitpandaNo ratings yet
- Unit 5: CMOS Subsystem Design: Pucknell Neil WestDocument38 pagesUnit 5: CMOS Subsystem Design: Pucknell Neil WestPraveen AndrewNo ratings yet
- RTLDocument40 pagesRTLultimatetycoonNo ratings yet
- Project Report - VHDL MUXDocument4 pagesProject Report - VHDL MUXMsdmsd Msd100% (1)
- EENG (INFE) 115 Final Exam-SolutionDocument8 pagesEENG (INFE) 115 Final Exam-SolutionGhost BustersNo ratings yet
- mULTIPLEXING and GSMDocument34 pagesmULTIPLEXING and GSMDoncollins MuneneNo ratings yet
- Digital IC List AlllllDocument3 pagesDigital IC List AlllllDeepa DevarajNo ratings yet
- IID2173 Digital Logic Design 41634 Final - Exam - QDocument8 pagesIID2173 Digital Logic Design 41634 Final - Exam - QswidyartoNo ratings yet
- 248 Lab 5 ManualDocument10 pages248 Lab 5 ManualAllie JuneNo ratings yet
- Digital Logic Circuit: Class 04Document34 pagesDigital Logic Circuit: Class 04qpalzmNo ratings yet
- 111 CatalogDocument208 pages111 CatalogwworxNo ratings yet
- KTU - CST202 - Computer Organization and ArchitectureDocument24 pagesKTU - CST202 - Computer Organization and ArchitectureJoel K SanthoshNo ratings yet
- Cap 1000Document3 pagesCap 1000James WrightNo ratings yet
- Chapter 5Document59 pagesChapter 5Humna DubbiiNo ratings yet
- STLD Lab ExperimentsDocument30 pagesSTLD Lab Experimentslokesh krapaNo ratings yet
- PM Family Parameter Reference Dictionary XPM09 PDFDocument1,198 pagesPM Family Parameter Reference Dictionary XPM09 PDFmhafeizjNo ratings yet
- Combinational Vs Sequential CircuitDocument8 pagesCombinational Vs Sequential CircuitNaima Naeem 631-FBAS/BSIT/F21No ratings yet
- Code Converters, Multiplexers, and DemultiplexersDocument34 pagesCode Converters, Multiplexers, and DemultiplexersjohnsamvlbNo ratings yet
- Manual Operating NSD570 PDFDocument350 pagesManual Operating NSD570 PDFDaniel Christian100% (3)
- VHDL ProgrammingDocument92 pagesVHDL ProgrammingDavid GoliathNo ratings yet
- Viva QuestionsDocument19 pagesViva QuestionskslnNo ratings yet
- Certified Solidworks Professional Advanced Weldments Exam PreparationFrom EverandCertified Solidworks Professional Advanced Weldments Exam PreparationRating: 5 out of 5 stars5/5 (1)
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchFrom EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchRating: 4 out of 5 stars4/5 (10)
- Product Manufacturing and Cost Estimating using CAD/CAE: The Computer Aided Engineering Design SeriesFrom EverandProduct Manufacturing and Cost Estimating using CAD/CAE: The Computer Aided Engineering Design SeriesRating: 4 out of 5 stars4/5 (4)
- AutoCAD 2010 Tutorial Series: Drawing Dimensions, Elevations and SectionsFrom EverandAutoCAD 2010 Tutorial Series: Drawing Dimensions, Elevations and SectionsNo ratings yet