You might also like
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Zone Designation Description: 1A First Return Stroke ZoneDocument2 pagesZone Designation Description: 1A First Return Stroke ZoneSonali SrivastavaNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Statically Determinate - Chapter 2Document43 pagesStatically Determinate - Chapter 2Sonali SrivastavaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- 3D Functional Tolerancing & Annotation: What's New Getting StartedDocument528 pages3D Functional Tolerancing & Annotation: What's New Getting StartedSonali SrivastavaNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Bend Tooling IncDocument4 pagesBend Tooling IncSonali SrivastavaNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Lightning Protection AircraftDocument564 pagesLightning Protection AircraftSonali Srivastava100% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Introduction To Geometric Dimensioning and TolerancingDocument14 pagesIntroduction To Geometric Dimensioning and Tolerancingtushk20No ratings yet
- Aircraft Icing HandbookDocument108 pagesAircraft Icing HandbookThanasis GodosidisNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Ar0854 PDFDocument240 pagesAr0854 PDFramchanderNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Test Your GD&T Knowledge QuizDocument4 pagesTest Your GD&T Knowledge QuizSonali SrivastavaNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- FM BasicDocument49 pagesFM BasicSonali SrivastavaNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- Number System TGDocument85 pagesNumber System TGSonali SrivastavaNo ratings yet
- Courseplan For Avionics II - FinalDocument7 pagesCourseplan For Avionics II - FinalSonali SrivastavaNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Basic Autopilot SystemsDocument4 pagesBasic Autopilot SystemsSonali Srivastava100% (1)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Autopilot 3263Document121 pagesAutopilot 3263Sonali SrivastavaNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Install ATC Creo Pro 5.0Document21 pagesInstall ATC Creo Pro 5.0Sonali SrivastavaNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- InstallDocument222 pagesInstallSonali SrivastavaNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Acp33 3 Flight Airplane EnginesDocument77 pagesAcp33 3 Flight Airplane EnginesAndre GordonNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Aerodynamic BalancingDocument14 pagesAerodynamic BalancingSonali Srivastava50% (2)
- Basic Concept of ThermodynamicsDocument73 pagesBasic Concept of ThermodynamicsLavu Anil ChowdaryNo ratings yet
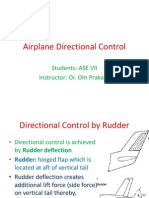
- Airplane Directional Control: Students: ASE VII Instructor: Dr. Om PrakashDocument6 pagesAirplane Directional Control: Students: ASE VII Instructor: Dr. Om PrakashSonali SrivastavaNo ratings yet
- AerodynamicsDocument35 pagesAerodynamicsSonali SrivastavaNo ratings yet
- Basic AerodynamicsDocument49 pagesBasic AerodynamicsJayDeep KhajureNo ratings yet
- Maneuvering StabilityDocument4 pagesManeuvering StabilitySonali SrivastavaNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Directional Stability in Aircraft DesignDocument9 pagesDirectional Stability in Aircraft DesignSonali SrivastavaNo ratings yet
- Business OrganizationsDocument24 pagesBusiness OrganizationsHemang LimbachiyaNo ratings yet
- Directional Stability in Aircraft DesignDocument9 pagesDirectional Stability in Aircraft DesignSonali SrivastavaNo ratings yet
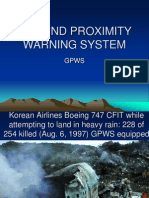
- 19ground Proximity Warning SystemDocument22 pages19ground Proximity Warning SystemSonali Srivastava100% (1)
- NextGen CRM by Sonali UpdatedDocument58 pagesNextGen CRM by Sonali UpdatedSonali SrivastavaNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Complex Numbers: BY Shreya Kuchhal Darshika Kothari Riya Gupta Simran SardaDocument18 pagesComplex Numbers: BY Shreya Kuchhal Darshika Kothari Riya Gupta Simran Sardasimran sardaNo ratings yet
- Rocket PropulsionDocument41 pagesRocket PropulsionV DhinakaranNo ratings yet
- Factors that Determine Paper StrengthDocument23 pagesFactors that Determine Paper StrengthNur Ariesman Salleh100% (2)
- Sag Slurry PoolingDocument10 pagesSag Slurry PoolingalgroneNo ratings yet
- Fourier Transform and Its Medical ApplicationDocument55 pagesFourier Transform and Its Medical Applicationadriveros100% (1)
- Topic 1Document17 pagesTopic 1Trịnh Tuấn HiềnNo ratings yet
- Mohit SIR LATEST Notes (GATE+ESE-2020) )Document5 pagesMohit SIR LATEST Notes (GATE+ESE-2020) )Vipul MetaNo ratings yet
- Acids and Bases: Answers To Worked ExamplesDocument12 pagesAcids and Bases: Answers To Worked ExamplesDana CapbunNo ratings yet
- Text - Anuario Cader 2018 INGLÉS PDFDocument57 pagesText - Anuario Cader 2018 INGLÉS PDFmicaelaNo ratings yet
- Data Sheet Otdr Fho5000 enDocument2 pagesData Sheet Otdr Fho5000 enJulio RoDriguezNo ratings yet
- Assg 03 1Document7 pagesAssg 03 1Abdul ShakoorNo ratings yet
- Steel Castings Handbook: Supplement 2Document66 pagesSteel Castings Handbook: Supplement 2Harshit AgarwalNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Noise Margin Definition ExplainedDocument10 pagesNoise Margin Definition ExplainedAnil BhardwajNo ratings yet
- Wiring DiagramDocument24 pagesWiring DiagramReji Raju0% (1)
- Rectilinear Motion and Rotating VesselDocument4 pagesRectilinear Motion and Rotating VesselJack PresadoNo ratings yet
- Best Book of Mathematics For All Copetitive ExamsDocument407 pagesBest Book of Mathematics For All Copetitive ExamsMuhammad IshtiaqNo ratings yet
- Acceleration (Inclined Plane)Document5 pagesAcceleration (Inclined Plane)jambunaNo ratings yet
- Folder Airless Auto Serie AlDocument2 pagesFolder Airless Auto Serie AlErika MaraNo ratings yet
- ChemDocument2 pagesChemBaliuag Guia100% (4)
- A Potential Attenuation Equation For Design and Analysis of Pipeline Cathodic Protection Systems With Displaced An (51300-03197-Sg)Document18 pagesA Potential Attenuation Equation For Design and Analysis of Pipeline Cathodic Protection Systems With Displaced An (51300-03197-Sg)rachedNo ratings yet
- Flux 10 4 New Features Presentation ValideDocument22 pagesFlux 10 4 New Features Presentation ValideleelNo ratings yet
- A Brief Overview of The Holographic TechnologyDocument5 pagesA Brief Overview of The Holographic TechnologyAltiel Ltd.No ratings yet
- Electronics Engg.: Detailed Solutions ofDocument52 pagesElectronics Engg.: Detailed Solutions ofAshish ChoudharyNo ratings yet
- Weather in Kuttiadi - Google SearchDocument1 pageWeather in Kuttiadi - Google Searchsorry Its My StyleNo ratings yet
- Mock Tests 20 20 Class 9 Science SampleDocument13 pagesMock Tests 20 20 Class 9 Science SamplesrilathaNo ratings yet
- Quantum NumbersDocument10 pagesQuantum Numbersaplattinum1633No ratings yet
- Analysis of Truss Using Abaqus SoftwareDocument7 pagesAnalysis of Truss Using Abaqus SoftwareKarthick NNo ratings yet
- Electrical and Optical Properties of Indium-Tin Oxide (ITO) Films by Ion-Assisted Deposition (IAD) at Room TemperatureDocument6 pagesElectrical and Optical Properties of Indium-Tin Oxide (ITO) Films by Ion-Assisted Deposition (IAD) at Room Temperaturereza mirzakhaniNo ratings yet
- Key Words: Targeting, HEN, Composite Curve,: Module 04: Targeting Lecture 10: Energy Targeting ProcedureDocument8 pagesKey Words: Targeting, HEN, Composite Curve,: Module 04: Targeting Lecture 10: Energy Targeting ProcedureCalNo ratings yet
- Determining Dielectric Constants Using A Parallel Plate CapacitorDocument5 pagesDetermining Dielectric Constants Using A Parallel Plate CapacitorAhmAd GhAziNo ratings yet