You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Wall Street Expose: Monkey Business Reveals Investment Banking RealitiesDocument2 pagesWall Street Expose: Monkey Business Reveals Investment Banking Realitiestorquewip100% (1)
- Autocad ShortcutsDocument13 pagesAutocad ShortcutsKriscel CaraanNo ratings yet
- The Catenary PDFDocument5 pagesThe Catenary PDFChandra PrakashNo ratings yet
- Method Statement Pressure TestingDocument15 pagesMethod Statement Pressure TestingAkmaldeen AhamedNo ratings yet
- 797B Commissioning Guidebook 07 (Procesos)Document65 pages797B Commissioning Guidebook 07 (Procesos)wilmerNo ratings yet
- Abinitio Interview QuesDocument30 pagesAbinitio Interview QuesVasu ManchikalapudiNo ratings yet
- TheSun 2008-11-04 Page16 Asian Stocks Rally Continues On Policy HopesDocument1 pageTheSun 2008-11-04 Page16 Asian Stocks Rally Continues On Policy HopesImpulsive collectorNo ratings yet
- IMO CSS Code PDFDocument2 pagesIMO CSS Code PDFYan Naung AyeNo ratings yet
- Indonesia Status 2014 by Willy OlsenDocument10 pagesIndonesia Status 2014 by Willy Olsendhana_benzNo ratings yet
- 1989 Volvo 740 Instruments and ControlsDocument107 pages1989 Volvo 740 Instruments and Controlsskyliner538No ratings yet
- Rules For Towing SurveyDocument14 pagesRules For Towing Surveythugsdei100% (2)
- SOF IEO Sample Paper Class 4Document2 pagesSOF IEO Sample Paper Class 4Rajesh RNo ratings yet
- West Eminence Short Spec 21 March 2016Document3 pagesWest Eminence Short Spec 21 March 2016dhana_benzNo ratings yet
- VPG 07Document2 pagesVPG 07dhana_benzNo ratings yet
- West AlphaDocument1 pageWest Alphadhana_benzNo ratings yet
- 8 Strand PolypropyleneDocument1 page8 Strand Polypropylenedhana_benzNo ratings yet
- FiltersDocument7 pagesFiltersdhana_benzNo ratings yet
- Wavespectra PDFDocument21 pagesWavespectra PDFpektophNo ratings yet
- Colagrossi Etal Nutts98Document4 pagesColagrossi Etal Nutts98dhana_benzNo ratings yet
- West Leo 2016Document3 pagesWest Leo 2016dhana_benzNo ratings yet
- Kamus PerkapalanDocument0 pagesKamus Perkapalanmustain_henyNo ratings yet
- Hydrodynamic ForcesDocument11 pagesHydrodynamic ForcesGraham SeggewissNo ratings yet
- Extra Heavy Wire Rope ThimblesDocument1 pageExtra Heavy Wire Rope ThimblesJogi Oscar SinagaNo ratings yet
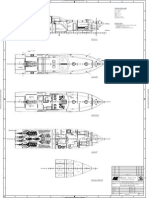
- Ga Patrol VesselDocument1 pageGa Patrol Vesseldhana_benzNo ratings yet
- Web Solver IntegrationDocument48 pagesWeb Solver Integrationdhana_benzNo ratings yet
- GeometryDocument34 pagesGeometrychoni singhNo ratings yet
- Acg F F D P 1: Ull Ield Evelopment HaseDocument1 pageAcg F F D P 1: Ull Ield Evelopment Hasedhana_benzNo ratings yet
- Bni Castor 9651369 Anchor Handling VesselDocument1 pageBni Castor 9651369 Anchor Handling Vesseldhana_benzNo ratings yet
- Tug LinesDocument1 pageTug Linesdhana_benzNo ratings yet
- Sfa Fpso Guide e Feb14Document45 pagesSfa Fpso Guide e Feb14dhana_benzNo ratings yet
- Excel Numerical IntegrationDocument9 pagesExcel Numerical IntegrationPrasad PantNo ratings yet
- Otto Theory ManualDocument37 pagesOtto Theory Manualdhana_benzNo ratings yet
- The Effect of Second-Order Hydrodynamics On Floating Offshore Wind TurbinesDocument12 pagesThe Effect of Second-Order Hydrodynamics On Floating Offshore Wind Turbinesdhana_benzNo ratings yet
- Ts 609Document16 pagesTs 609dhana_benzNo ratings yet
- Yield CriteriaDocument23 pagesYield CriteriaJuan MNo ratings yet
- Advanced Offshore Engineering Seminar JakartaDocument1 pageAdvanced Offshore Engineering Seminar Jakartadhana_benzNo ratings yet
- Conics, Parametric Equations, and Polar CoordinatesDocument34 pagesConics, Parametric Equations, and Polar CoordinatesGARO OHANOGLUNo ratings yet
- Viviana Rodriguez: Education The University of Texas at El Paso (UTEP)Document1 pageViviana Rodriguez: Education The University of Texas at El Paso (UTEP)api-340240168No ratings yet
- PronPack 5 Sample MaterialDocument13 pagesPronPack 5 Sample MaterialAlice FewingsNo ratings yet
- 2017 2 Solarcon Catalogue Final RevisedDocument8 pages2017 2 Solarcon Catalogue Final RevisedNavarshi VishnubhotlaNo ratings yet
- Biometric SecurityDocument495 pagesBiometric SecurityPlay100% (1)
- Ground Floor 40X80 Option-1Document1 pageGround Floor 40X80 Option-1Ashish SrivastavaNo ratings yet
- Alarm Management Second Ed - Hollifield Habibi - IntroductionDocument6 pagesAlarm Management Second Ed - Hollifield Habibi - IntroductionDavid DuranNo ratings yet
- MRI Week3 - Signal - Processing - TheoryDocument43 pagesMRI Week3 - Signal - Processing - TheoryaboladeNo ratings yet
- E Series CatalystDocument1 pageE Series CatalystEmiZNo ratings yet
- Blocked threads jstack analysisDocument69 pagesBlocked threads jstack analysisMike TNo ratings yet
- The Meaning of Solar CookerDocument4 pagesThe Meaning of Solar CookerJaridah Mat YakobNo ratings yet
- Organization & Management: Manuel L. Hermosa, RN, Mba, Man, Edd, LPT, MaedcDocument32 pagesOrganization & Management: Manuel L. Hermosa, RN, Mba, Man, Edd, LPT, MaedcManny HermosaNo ratings yet
- Regional Office X: Republic of The PhilippinesDocument2 pagesRegional Office X: Republic of The PhilippinesCoreine Imee ValledorNo ratings yet
- Bylaw 16232 High Park RezoningDocument9 pagesBylaw 16232 High Park RezoningJamie_PostNo ratings yet
- Going to the cinema listening practiceDocument2 pagesGoing to the cinema listening practiceMichael DÍligo Libre100% (1)
- Report On Indian Airlines Industry On Social Media, Mar 2015Document9 pagesReport On Indian Airlines Industry On Social Media, Mar 2015Vang LianNo ratings yet
- Chapter 9 Lease DecisionsDocument51 pagesChapter 9 Lease Decisionsceoji25% (4)
- Phenolic Compounds in Rice May Reduce Health RisksDocument7 pagesPhenolic Compounds in Rice May Reduce Health RisksMuhammad Usman AkramNo ratings yet
- Strategic Marketing FiguresDocument34 pagesStrategic Marketing FiguresphuongmonNo ratings yet
- 2018 JC2 H2 Maths SA2 River Valley High SchoolDocument50 pages2018 JC2 H2 Maths SA2 River Valley High SchoolZtolenstarNo ratings yet
- Building MassingDocument6 pagesBuilding MassingJohn AmirNo ratings yet
- Product 243: Technical Data SheetDocument3 pagesProduct 243: Technical Data SheetRuiNo ratings yet
- PENGARUH CYBERBULLYING BODY SHAMING TERHADAP KEPERCAYAAN DIRIDocument15 pagesPENGARUH CYBERBULLYING BODY SHAMING TERHADAP KEPERCAYAAN DIRIRizky Hizrah WumuNo ratings yet