You might also like
- Mplab X y c18 - InterrupcionesDocument4 pagesMplab X y c18 - InterrupcionesPedro SánchezNo ratings yet
- Contador de 0 A 9 Con Pic16f84aDocument4 pagesContador de 0 A 9 Con Pic16f84aPedro SánchezNo ratings yet
- Mplab X y c18 - Led IntermitenteDocument4 pagesMplab X y c18 - Led IntermitentePedro SánchezNo ratings yet
- Mplab X y c18 - Encender y Apagar Un Led Con Un BotonDocument4 pagesMplab X y c18 - Encender y Apagar Un Led Con Un BotonPedro SánchezNo ratings yet
- Encender y Apargar Un Relevador Con Vb6 y Puerto LTPDocument1 pageEncender y Apargar Un Relevador Con Vb6 y Puerto LTPPedro SánchezNo ratings yet
- Control Fotoelectrico (Luz Automatica)Document1 pageControl Fotoelectrico (Luz Automatica)Pedro SánchezNo ratings yet
- Entrenadora-Pics - Modulo de 8 Entradas o SalidasDocument3 pagesEntrenadora-Pics - Modulo de 8 Entradas o SalidasPedro SánchezNo ratings yet
- Alternar Encendido de Dos Leds Con Pic12f675Document3 pagesAlternar Encendido de Dos Leds Con Pic12f675Pedro Sánchez0% (1)
- Entrenadora-Pics - Modulo para Pics de 40 PinesDocument8 pagesEntrenadora-Pics - Modulo para Pics de 40 PinesPedro SánchezNo ratings yet
- Sensor para Led Con Fotorresistencia (LDR)Document7 pagesSensor para Led Con Fotorresistencia (LDR)Erick Escogido EscobedoNo ratings yet
- Control Del Puerto Paralelo Con Visual Basic 6.0Document7 pagesControl Del Puerto Paralelo Con Visual Basic 6.0Pedro SánchezNo ratings yet
- Crear Un Proyecto en Eagle (Esquematico y Ruteado)Document8 pagesCrear Un Proyecto en Eagle (Esquematico y Ruteado)Ivan RomoNo ratings yet
- MPLAB X Y C18 - USO DE LA LIBRERÍA Delays.hDocument1 pageMPLAB X Y C18 - USO DE LA LIBRERÍA Delays.hPedro SánchezNo ratings yet
- Sensores Infrarrojos (Qrd1114 y Cny70)Document2 pagesSensores Infrarrojos (Qrd1114 y Cny70)Pedro SánchezNo ratings yet
- Sensor Infrarojo Is471fDocument2 pagesSensor Infrarojo Is471fPedro SánchezNo ratings yet
- Multivibrador Astable Con TransistoresDocument3 pagesMultivibrador Astable Con TransistoresPedro SánchezNo ratings yet
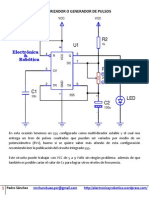
- Temporizador o Generador de PulsosDocument2 pagesTemporizador o Generador de PulsosPedro SánchezNo ratings yet
- Oscilador Por Hardware en Un PicDocument3 pagesOscilador Por Hardware en Un PicPedro SánchezNo ratings yet
- Robot Seguidor de Lineas (Basico)Document6 pagesRobot Seguidor de Lineas (Basico)Pedro SánchezNo ratings yet
- Reset Por Hardware en Un PicDocument1 pageReset Por Hardware en Un PicUfoLeds CncNo ratings yet
- Mplab X y C18 - Sentencias Repetitivas y SelectivasDocument5 pagesMplab X y C18 - Sentencias Repetitivas y SelectivasPedro SánchezNo ratings yet
- Mplab X y c18 - OperadoresDocument3 pagesMplab X y c18 - OperadoresPedro SánchezNo ratings yet
- Invertir El Giro de Un Motor de CD Con El l293b o l293dDocument4 pagesInvertir El Giro de Un Motor de CD Con El l293b o l293dPedro SánchezNo ratings yet
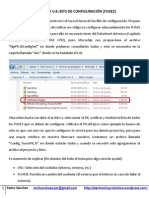
- Mplab X y C18 - Bits de Configuración (Fuses)Document5 pagesMplab X y C18 - Bits de Configuración (Fuses)Pedro SánchezNo ratings yet
- Mplab X y c18 - Crear Nuevo ProyectoDocument5 pagesMplab X y c18 - Crear Nuevo ProyectoPedro SánchezNo ratings yet
- Introducción A Las Compuertas LógicasDocument6 pagesIntroducción A Las Compuertas LógicasPedro Sánchez67% (3)
- Fuente de Alumentación de 5 VoltsDocument4 pagesFuente de Alumentación de 5 VoltsPedro SánchezNo ratings yet
- Introducción A Los Resistores y Código de ColoresDocument5 pagesIntroducción A Los Resistores y Código de ColoresPedro Sánchez100% (1)
- Fuente de Alimentacion SimetricaDocument6 pagesFuente de Alimentacion SimetricaPedro SánchezNo ratings yet
- Muestras de Exudados, Abscesos y Vesículas: Luz Jurado Sara García Lucía Calderón Rocío MuñozDocument13 pagesMuestras de Exudados, Abscesos y Vesículas: Luz Jurado Sara García Lucía Calderón Rocío MuñozLuciaNo ratings yet
- La Evolución HumanaDocument6 pagesLa Evolución HumanaJonathan BecerraNo ratings yet
- Comportamiento Organizacional: Las PersonasDocument24 pagesComportamiento Organizacional: Las Personasgipsy castroNo ratings yet
- Montaje en ArticuladorDocument32 pagesMontaje en ArticuladorAnita GrosmanNo ratings yet
- Texto Enciso, Luis Miguel - La Ilustración PDFDocument10 pagesTexto Enciso, Luis Miguel - La Ilustración PDFMARIA FERNANDA JIMENEZNo ratings yet
- Sanchez QD PDFDocument131 pagesSanchez QD PDFEdson palomino100% (1)
- Guia Artes de PescaDocument56 pagesGuia Artes de PescaMaribi Cruz Ortega100% (1)
- Organizadores Graficos de Observacion y Analisis de La Practica Segunda UnidadDocument8 pagesOrganizadores Graficos de Observacion y Analisis de La Practica Segunda UnidadAlexandro Sanchez AlvardoNo ratings yet
- MonsterDocument45 pagesMonsterMercyNo ratings yet
- Origen Del LaudDocument264 pagesOrigen Del LaudAman DonosNo ratings yet
- RCP Neo 3 - Pasos InicialesDocument48 pagesRCP Neo 3 - Pasos InicialesSheena CohenNo ratings yet
- Ejercicios de conectores lógicos y su usoDocument4 pagesEjercicios de conectores lógicos y su usoMarcela Ivonne GallegosNo ratings yet
- Verifica Protocolo Gradomaster 110207Document10 pagesVerifica Protocolo Gradomaster 110207joseNo ratings yet
- Quimica-3ero-Tema 6-Nomenclatura Inorganica...Document11 pagesQuimica-3ero-Tema 6-Nomenclatura Inorganica...Renzo ZapataNo ratings yet
- 2022-04-11 - Examen de Comunicacion 4ºDocument4 pages2022-04-11 - Examen de Comunicacion 4ºJAMES MARLON VIERA HUERTASNo ratings yet
- Calendario fertilidadDocument1 pageCalendario fertilidadVictor Ricardo Huaman LandaNo ratings yet
- Planificación anual de Artes 2023Document27 pagesPlanificación anual de Artes 2023ignaciaNo ratings yet
- TIBERIODocument11 pagesTIBERIOWILLIANS ANDRADENo ratings yet
- Dany Frank Torres Caceres - Examen FinalDocument3 pagesDany Frank Torres Caceres - Examen FinalJessica Karen Yauri RojasNo ratings yet
- Asi Del Precipicio. AnalisisDocument6 pagesAsi Del Precipicio. AnalisisIlse WOnkaaNo ratings yet
- Guía de Trabajo Facultad de PsicologíaDocument2 pagesGuía de Trabajo Facultad de PsicologíaALISON JULIETH SUAREZ MORALESNo ratings yet
- Presentación Seccion 16 PIDocument13 pagesPresentación Seccion 16 PIMaría Fernanda VerdeNo ratings yet
- Matriz Dofa Leidy GarzonDocument3 pagesMatriz Dofa Leidy Garzonjoha garzonNo ratings yet
- Emily Daniela Arroyo Cando UbaDocument6 pagesEmily Daniela Arroyo Cando UbaAdonys ReascoNo ratings yet
- Acidosis Metabolica HipercloremicaDocument1 pageAcidosis Metabolica HipercloremicaLuz DiazNo ratings yet
- Clase 04. Dotación de Agua en Edificaciones.Document16 pagesClase 04. Dotación de Agua en Edificaciones.Sidsel Alanya SánchezNo ratings yet
- Airles Equipo de PinturaDocument12 pagesAirles Equipo de Pinturadominguezleonidas67No ratings yet
- Fruto Tera PiaDocument17 pagesFruto Tera PiaEber CisnerosNo ratings yet
- Cronologia EzequielDocument3 pagesCronologia EzequielViktor Ortiz100% (2)
- Esp Mod3 Aula14Document16 pagesEsp Mod3 Aula14rlbNo ratings yet