You might also like
- Study of Model Predictive Control Using Ni LabviewDocument10 pagesStudy of Model Predictive Control Using Ni LabviewBrankko Jhonathan Torres SaavedraNo ratings yet
- Performance Analysis of Scheduling Processes For FIFO and Round Robin Algorithms in Internet of Things Device Operating SystemDocument6 pagesPerformance Analysis of Scheduling Processes For FIFO and Round Robin Algorithms in Internet of Things Device Operating SystemFraenlyIanPattipawaeNo ratings yet
- UserGuide DLLs IPSEpro TPE MEMondejarDocument19 pagesUserGuide DLLs IPSEpro TPE MEMondejarzhyhhNo ratings yet
- Architecture For Modeling and Simulation SIMITDocument17 pagesArchitecture For Modeling and Simulation SIMITLuis Jonathan Bahamaca FernandezNo ratings yet
- Model Predictive Control Linear Induction MotorDocument17 pagesModel Predictive Control Linear Induction Motorgummadi2010No ratings yet
- Low-Cost SCADA System Using Arduino and Reliance SDocument9 pagesLow-Cost SCADA System Using Arduino and Reliance SmarcoovidioNo ratings yet
- CSTRDocument12 pagesCSTRRuri Agung WahyuonoNo ratings yet
- Rich Operation Experiences and New Technologies On Adjustable Speed Pumped Storage Systems in JapanDocument8 pagesRich Operation Experiences and New Technologies On Adjustable Speed Pumped Storage Systems in JapanR0B0T2013100% (1)
- Lecture 6Document39 pagesLecture 6Kashka IraniNo ratings yet
- Concentration Changes in A CSTR (Continuous Stirred Tank Reactor)Document10 pagesConcentration Changes in A CSTR (Continuous Stirred Tank Reactor)pekanselandarNo ratings yet
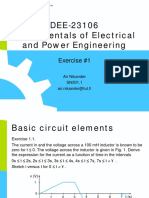
- DEE-23106 Fundamentals of Electrical and Power Engineering: Exercise #1Document12 pagesDEE-23106 Fundamentals of Electrical and Power Engineering: Exercise #1shoptodipNo ratings yet
- Dissertação Van Der PolDocument99 pagesDissertação Van Der PolVinicius CostaNo ratings yet
- Conway ChristopherDocument101 pagesConway ChristopherKolo TomoNo ratings yet
- Process Models GuideDocument213 pagesProcess Models GuideApril TrevinoNo ratings yet
- Modeling and Simulation of CSTR For Manufacture of Propylene GlycolDocument6 pagesModeling and Simulation of CSTR For Manufacture of Propylene Glycolantoojacome100% (1)
- MatStudio Castep - 2Document63 pagesMatStudio Castep - 2Anish Kumar100% (1)
- The Particle Swarm Optimization AlgorithmDocument18 pagesThe Particle Swarm Optimization Algorithmjaved765No ratings yet
- Simulink Tutorial PDFDocument34 pagesSimulink Tutorial PDFsvp3761No ratings yet
- Modeling and Simulation of Wind TurbinesDocument128 pagesModeling and Simulation of Wind TurbinesDaniel_Gar_Wah_HoNo ratings yet
- Programmable Logic Controller Structure and FeaturesDocument26 pagesProgrammable Logic Controller Structure and FeaturesKrista JacksonNo ratings yet
- Sandia Report Reviews 8 Solar Thermochemical Cycles for Hydrogen ProductionDocument117 pagesSandia Report Reviews 8 Solar Thermochemical Cycles for Hydrogen ProductionrelojucaNo ratings yet
- Presentasi AwalDocument77 pagesPresentasi AwalFadil AdamNo ratings yet
- Analysis of Power Quality Issues and Implementation of UPQC Topologies To Enhance Power System StabilityDocument16 pagesAnalysis of Power Quality Issues and Implementation of UPQC Topologies To Enhance Power System StabilityEditor IJTSRDNo ratings yet
- PID Control Fundamentals ExplainedDocument56 pagesPID Control Fundamentals ExplainedSyafRizal100% (1)
- WEEK 6 MODULE 6 - Multivariable Control - NEWDocument106 pagesWEEK 6 MODULE 6 - Multivariable Control - NEWmutencoNo ratings yet
- Safety Integrity LevelDocument4 pagesSafety Integrity LevelHardik AcharyaNo ratings yet
- 11evaluation of Oxygen Transfer Efficiency Via Off-Gas Testing at FullDocument8 pages11evaluation of Oxygen Transfer Efficiency Via Off-Gas Testing at FullIrving VazquezNo ratings yet
- Chemical Process Control A First Course With Matlab - P.C. Chau PDFDocument255 pagesChemical Process Control A First Course With Matlab - P.C. Chau PDFAli NassarNo ratings yet
- Improved Active Power Filter Performance For Renewable Power Generation SystemsDocument8 pagesImproved Active Power Filter Performance For Renewable Power Generation SystemsKuncham SateeshNo ratings yet
- Smart Grids 2008Document4 pagesSmart Grids 2008lalocura_41No ratings yet
- Simulation of electric machines and drive systemsDocument17 pagesSimulation of electric machines and drive systemsSamuel Alves de SouzaNo ratings yet
- ABB AbilityTM Control Technologies PortfolioDocument2 pagesABB AbilityTM Control Technologies Portfolioamiru mustofaNo ratings yet
- Kalman FiltersDocument24 pagesKalman Filtersgerte_yuewNo ratings yet
- Wind Analysis ReportDocument84 pagesWind Analysis ReportUsama AdeelNo ratings yet
- Introduction and Basic Concepts: MAE 320-Chapter 1Document10 pagesIntroduction and Basic Concepts: MAE 320-Chapter 1Abdu AbdoulayeNo ratings yet
- Particle Swarm Optimization Based Reactive Power Dispatch For PowDocument98 pagesParticle Swarm Optimization Based Reactive Power Dispatch For Powwjdan alzwi100% (1)
- Research Article: Model-Based Development of Control Systems For Forestry CranesDocument16 pagesResearch Article: Model-Based Development of Control Systems For Forestry Cranesgil lerNo ratings yet
- Model Predicive ControlDocument17 pagesModel Predicive ControlBaig IdrisNo ratings yet
- Practical Control of Electric Machines: Model-Based Design and SimulationFrom EverandPractical Control of Electric Machines: Model-Based Design and SimulationNo ratings yet
- Real Time Application of Ants Colony Optimization: Dr.S.M.Girirajkumar Dr.K.Ramkumar Sanjay Sarma O.VDocument13 pagesReal Time Application of Ants Colony Optimization: Dr.S.M.Girirajkumar Dr.K.Ramkumar Sanjay Sarma O.VKarthik BalajiNo ratings yet
- Model Predictive ControlDocument17 pagesModel Predictive ControlewaqfdeNo ratings yet
- Intelligent System Design of Microcontroller Based Real Time Process Control Trainer .Document12 pagesIntelligent System Design of Microcontroller Based Real Time Process Control Trainer .Kelvin NnamaniNo ratings yet
- PID Controllers and Algorithms: Selection and Design Techniques Applied in Mechatronics Systems Design - Part IIDocument13 pagesPID Controllers and Algorithms: Selection and Design Techniques Applied in Mechatronics Systems Design - Part IITI Journals PublishingNo ratings yet
- Embedded Fuzzy-Control System For Machining Processes Results of A Case StudyDocument14 pagesEmbedded Fuzzy-Control System For Machining Processes Results of A Case StudyMuhammad BagusNo ratings yet
- Term PaperDocument9 pagesTerm PaperJake YaoNo ratings yet
- Model Predictive ControlDocument6 pagesModel Predictive Controltigy vargheseNo ratings yet
- Process Control Trainer Project Report - Original1Document42 pagesProcess Control Trainer Project Report - Original1Augustine paulNo ratings yet
- Mod1 Mechatronics and Manufacturing Automation PDFDocument17 pagesMod1 Mechatronics and Manufacturing Automation PDFthebetterman0511No ratings yet
- Mechatronics Notes PDFDocument188 pagesMechatronics Notes PDFharish100% (1)
- Mini Project Report Industrial Automation SreekuDocument38 pagesMini Project Report Industrial Automation Sreekusreekumar456No ratings yet
- REVIEW PAPERDocument7 pagesREVIEW PAPERRoch RonaldoNo ratings yet
- MechatronicsDocument264 pagesMechatronicschandra shekharNo ratings yet
- Application of PLC's For Automation of Processes in IndustriesDocument7 pagesApplication of PLC's For Automation of Processes in IndustriesMHMDNo ratings yet
- Paper Template Saucedo - Vfinal2Document12 pagesPaper Template Saucedo - Vfinal2Juan JoseNo ratings yet
- Coordination of Operations by Relation Extraction For Manufacturing Cell ControllersDocument16 pagesCoordination of Operations by Relation Extraction For Manufacturing Cell ControllersJose Leonardo Simancas GarciaNo ratings yet
- Hydrauliske ServomekanismerDocument98 pagesHydrauliske ServomekanismerMike Fredskilde100% (1)
- Fuzzy Pid ControllerDocument65 pagesFuzzy Pid ControllerAnkit DattNo ratings yet
- Engineering Science and Technology, An International JournalDocument1 pageEngineering Science and Technology, An International Journalpaxesicrado-3649No ratings yet
- Ebrahimi 2018Document11 pagesEbrahimi 2018Vivek SenguptaNo ratings yet
- DCSDocument57 pagesDCSRanjita SinghNo ratings yet
- Management Information System May4Document23 pagesManagement Information System May4Jeeva MJNo ratings yet
- Pendulum PaperDocument7 pagesPendulum Paperapi-3832828No ratings yet
- Tamil Nadu 12th Standard HistoryDocument194 pagesTamil Nadu 12th Standard HistoryIndia History Resources88% (8)
- Core Company List For InstrumentationDocument4 pagesCore Company List For InstrumentationJeeva MJNo ratings yet
- Inverted PendulumDocument6 pagesInverted PendulumJeeva MJNo ratings yet
- 8051 Instruction SetDocument81 pages8051 Instruction SetSaket GargNo ratings yet
- Ee101 Basics 1Document146 pagesEe101 Basics 1Pooja MeenaNo ratings yet
- Calculus Cheat Sheet Limits Definitions Limit at InfinityDocument11 pagesCalculus Cheat Sheet Limits Definitions Limit at Infinityapi-1192241886% (7)
- Basic MATLAB ProgrammingDocument4 pagesBasic MATLAB ProgrammingaadhargilhotraNo ratings yet
- Lecture 1Document33 pagesLecture 1sandeepbabu28No ratings yet
- Neuro Fuzzy SystemDocument24 pagesNeuro Fuzzy SystemJeeva MJNo ratings yet
- Scada 1Document88 pagesScada 1Jeeva MJNo ratings yet
- Purdue OWLDocument26 pagesPurdue OWLJeeva MJNo ratings yet
- Vocabulary - Word Analogies Strategy (Concept, Word Relationships)Document4 pagesVocabulary - Word Analogies Strategy (Concept, Word Relationships)Jeeva MJNo ratings yet
- Automatic Liquid Filling To Bottles of Different HeightDocument3 pagesAutomatic Liquid Filling To Bottles of Different HeightJeeva MJNo ratings yet
- Major Schools of Literary CriticismDocument1 pageMajor Schools of Literary CriticismJeeva MJNo ratings yet
- AspectsofLanguageTeachingbyMJ FullDocument12 pagesAspectsofLanguageTeachingbyMJ FullJeeva MJNo ratings yet
- Ifatsea Atsep Brochure 2019 PDFDocument4 pagesIfatsea Atsep Brochure 2019 PDFCondor GuatonNo ratings yet
- Loverpreet Chapterv 1Document16 pagesLoverpreet Chapterv 1Sheikh SiddiquiNo ratings yet
- Beyond VaR OfficialDocument76 pagesBeyond VaR OfficialmaleckicoaNo ratings yet
- GuideDocument2 pagesGuideMaissyNo ratings yet
- EMarketer Time Spent With Media SnapshotDocument13 pagesEMarketer Time Spent With Media SnapshotWei ShingNo ratings yet
- Ex 2 6 FSC Part2 Ver3Document16 pagesEx 2 6 FSC Part2 Ver3Usama TariqNo ratings yet
- Dental System SoftwareDocument4 pagesDental System SoftwareHahaNo ratings yet
- Graphic Organizers for Organizing IdeasDocument11 pagesGraphic Organizers for Organizing IdeasMargie Tirado JavierNo ratings yet
- Re: Laparoscopic Myomectomy: A Review of Alternatives, Techniques and ControversiesDocument1 pageRe: Laparoscopic Myomectomy: A Review of Alternatives, Techniques and ControversiesMayada OsmanNo ratings yet
- Electronics HubDocument9 pagesElectronics HubKumaran SgNo ratings yet
- Intraoperative Nursing Care GuideDocument12 pagesIntraoperative Nursing Care GuideDarlyn AmplayoNo ratings yet
- OTGNNDocument13 pagesOTGNNAnh Vuong TuanNo ratings yet
- Sample of Accident Notification & Investigation ProcedureDocument2 pagesSample of Accident Notification & Investigation Procedurerajendhar100% (1)
- Business Ethics Concepts & Cases: Manuel G. VelasquezDocument19 pagesBusiness Ethics Concepts & Cases: Manuel G. VelasquezRaffi MouradianNo ratings yet
- User Manual LCD Signature Pad Signotec SigmaDocument15 pagesUser Manual LCD Signature Pad Signotec SigmaGael OmgbaNo ratings yet
- Gantt Chart Engr110 - Gantt Chart Template 3Document1 pageGantt Chart Engr110 - Gantt Chart Template 3api-375485735No ratings yet
- Activities/Assessments 2:: Determine The Type of Sampling. (Ex. Simple Random Sampling, Purposive Sampling)Document2 pagesActivities/Assessments 2:: Determine The Type of Sampling. (Ex. Simple Random Sampling, Purposive Sampling)John Philip Echevarria0% (2)
- Disappearance of Madeleine McCannDocument36 pagesDisappearance of Madeleine McCannCopernicNo ratings yet
- Tendernotice 2Document20 pagesTendernotice 2VIVEK SAININo ratings yet
- Italian Painters 02 MoreDocument450 pagesItalian Painters 02 Moregkavvadias2010No ratings yet
- Digitrip 520Document40 pagesDigitrip 520HACNo ratings yet
- OM - Rieter - UNIMix A76Document321 pagesOM - Rieter - UNIMix A76Phineas FerbNo ratings yet
- Mechanical EngineeringDocument14 pagesMechanical EngineeringSamuel WozabNo ratings yet
- Andrew Linklater - The Transformation of Political Community - E H Carr, Critical Theory and International RelationsDocument19 pagesAndrew Linklater - The Transformation of Political Community - E H Carr, Critical Theory and International Relationsmaria luizaNo ratings yet
- Trishasti Shalaka Purusa Caritra 4 PDFDocument448 pagesTrishasti Shalaka Purusa Caritra 4 PDFPratik ChhedaNo ratings yet
- Canna DispensariesDocument35 pagesCanna DispensariesWaf Etano100% (1)
- 4D - Yulianti Viviana - Exercise 9Document7 pages4D - Yulianti Viviana - Exercise 9Uli JennerNo ratings yet
- 7 Tools for Continuous ImprovementDocument202 pages7 Tools for Continuous Improvementvivekanand bhartiNo ratings yet
- Vonovia 9M2021 Presentation 20211118Document76 pagesVonovia 9M2021 Presentation 20211118LorenzoNo ratings yet
- Turabian Sample PaperDocument9 pagesTurabian Sample Paperemme_lopez908133% (3)