You might also like
- Welding InspectionDocument40 pagesWelding InspectionnazarasimNo ratings yet
- WIS5 Symbols 05Document52 pagesWIS5 Symbols 05anon_90890103No ratings yet
- Bs4872 Visual ApprovalDocument1 pageBs4872 Visual Approvalkjmcbain100% (1)
- Soldering & Brazing: Unit-IvDocument15 pagesSoldering & Brazing: Unit-IvRamu AmaraNo ratings yet
- Advanced Gas Metal Arc Welding ProcDocument20 pagesAdvanced Gas Metal Arc Welding ProcjavadmohammadiNo ratings yet
- Projection WeldDocument20 pagesProjection WeldCebrac ItatibaNo ratings yet
- CSWIP Welder Training: SymbolsDocument52 pagesCSWIP Welder Training: SymbolsBUDAPESNo ratings yet
- Astm e 2218 - 02Document15 pagesAstm e 2218 - 02Jaime Rafael Patron PrioloNo ratings yet
- GMAW Practical Slide Show - FINALDocument36 pagesGMAW Practical Slide Show - FINALDanem HalasNo ratings yet
- Submerged Arc WeldingDocument39 pagesSubmerged Arc WeldingAri GandaraNo ratings yet
- Gas Metal Arc WeldingDocument3 pagesGas Metal Arc Weldingvarun100% (1)
- WeldingDocument23 pagesWeldingBilal TayyabNo ratings yet
- Basic Welding GuideDocument71 pagesBasic Welding GuideIsac Newton100% (1)
- 1.lesson Plan Welding Basic Metals - 0 - 0Document6 pages1.lesson Plan Welding Basic Metals - 0 - 0Romel A. De GuiaNo ratings yet
- Lecture 1-Fundamentals of Welding MetallurgyDocument46 pagesLecture 1-Fundamentals of Welding MetallurgyHamiduNo ratings yet
- Content Free Downloads Aws b5.5 Specification For The Qualification of Welding EducatorsDocument27 pagesContent Free Downloads Aws b5.5 Specification For The Qualification of Welding EducatorsCharlesWilliamRichardNo ratings yet
- Gas Metal Arc Welding (GMAW)Document16 pagesGas Metal Arc Welding (GMAW)Akmal Bin Saipul AnuarNo ratings yet
- Welding Engineering - FALL2021-22 - Module 1Document44 pagesWelding Engineering - FALL2021-22 - Module 1dhaya nidhiNo ratings yet
- Acceptance CriteriaDocument19 pagesAcceptance CriteriaAnonymous 5iv0i3cZNo ratings yet
- Dye Penetrant Inspection - Wikipedia, The Free EncyclopediaDocument5 pagesDye Penetrant Inspection - Wikipedia, The Free Encyclopediaviswamanoj100% (1)
- BOC IPRM S08-ConsumablesDocument187 pagesBOC IPRM S08-ConsumablesEduard Lupus Lobo100% (1)
- Module 3 Construction and DesignDocument5 pagesModule 3 Construction and DesignDhimas Surya Negara100% (1)
- Shielded Metal Arc Welding: Mild Steel I (E7018)Document41 pagesShielded Metal Arc Welding: Mild Steel I (E7018)greatsteelNo ratings yet
- Flux Cored and MIG Pipe WeldingDocument59 pagesFlux Cored and MIG Pipe Weldingcentaury2013No ratings yet
- Optimization of MIG Welding ParametersDocument6 pagesOptimization of MIG Welding ParametersMario Antonio Araya MorosoNo ratings yet
- Job Knowledge 68Document8 pagesJob Knowledge 68Mehmet Soysal100% (1)
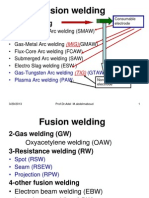
- Welding Lecture 2 Fusion (Liquid) State Welding Processes (ARC Welding)Document49 pagesWelding Lecture 2 Fusion (Liquid) State Welding Processes (ARC Welding)Adel Abdelmaboud100% (1)
- Add02 1060.1Document14 pagesAdd02 1060.1Diego Calderón AlvaradoNo ratings yet
- Welding Safety: By: Eng'r. Domz CanedaDocument30 pagesWelding Safety: By: Eng'r. Domz CanedaJohn BelmesNo ratings yet
- Fundamentals of Welding InspectionDocument53 pagesFundamentals of Welding InspectionIlyes kNo ratings yet
- Destructive Testing of Stud Welds: The FactsDocument2 pagesDestructive Testing of Stud Welds: The FactsGerson Suarez CastellonNo ratings yet
- 1 Typical Duties of Welding InspectorsDocument7 pages1 Typical Duties of Welding InspectorspandimrNo ratings yet
- Competitive Solutions For Joining TechnologyDocument19 pagesCompetitive Solutions For Joining Technologyjy12bhuNo ratings yet
- Weight Per Meter of WeldDocument1 pageWeight Per Meter of Weldreza329329No ratings yet
- Weldability of Cr-Mo SteelsDocument20 pagesWeldability of Cr-Mo SteelsNitin Bajpai100% (2)
- Wtia Iiw Iwe V3 - 0 PDFDocument2 pagesWtia Iiw Iwe V3 - 0 PDFRizwan NazirNo ratings yet
- Safety Training Brochure MetaboDocument4 pagesSafety Training Brochure MetaboJonathan DouglasNo ratings yet
- Electroslag WeldingDocument10 pagesElectroslag WeldingNazmul Ahsan100% (1)
- Carefully Evaluate Code RequirementsDocument3 pagesCarefully Evaluate Code Requirementsmayav1No ratings yet
- 1143 EWF IIW Diploma Overview - August 2013Document2 pages1143 EWF IIW Diploma Overview - August 2013Sean ฌอนNo ratings yet
- Course Note CSWIP 3.0Document168 pagesCourse Note CSWIP 3.0JohanSitorusNo ratings yet
- Arc Welding Arc Welding Electrode Electrode: CCCCC CCCCCDocument36 pagesArc Welding Arc Welding Electrode Electrode: CCCCC CCCCCSantanu SarmahNo ratings yet
- Welding SymbolsDocument49 pagesWelding SymbolsManiNo ratings yet
- Visual INSPECTION OF WELDSDocument49 pagesVisual INSPECTION OF WELDSpraveentienNo ratings yet
- Weld SymbolsDocument33 pagesWeld Symbolssan htet aungNo ratings yet
- Interpretations: ASME Boiler and Pressure Vessel Code Section IxDocument48 pagesInterpretations: ASME Boiler and Pressure Vessel Code Section Ixjuan ninaNo ratings yet
- Submerged Arc Welding: Training & EducationDocument17 pagesSubmerged Arc Welding: Training & Educationtanveer ahmedNo ratings yet
- Parameters Submerged Arc Welding HandbookDocument4 pagesParameters Submerged Arc Welding HandbookOur SalahEddine100% (1)
- Resistance WeldingDocument24 pagesResistance WeldingSenthil Kumar K LNo ratings yet
- Filler Metal Selection-SignedDocument14 pagesFiller Metal Selection-Signedamine bouizarNo ratings yet
- Product Data Sheet OK Tigrod 316L: W 'Tungsten Inert Gas Arc Welding'Document2 pagesProduct Data Sheet OK Tigrod 316L: W 'Tungsten Inert Gas Arc Welding'soft4gsmNo ratings yet
- EW 512 6 Nondestructive TestingDocument37 pagesEW 512 6 Nondestructive TestingHarun HodžićNo ratings yet
- Mild Steel Welding Handbook Vol 4Document2 pagesMild Steel Welding Handbook Vol 4Fasil ParuvanathNo ratings yet
- Aws Nema d16 2d16 2mDocument6 pagesAws Nema d16 2d16 2mjessy eghNo ratings yet
- The Physics of Welding: International Institute of WeldingFrom EverandThe Physics of Welding: International Institute of WeldingRating: 1.5 out of 5 stars1.5/5 (2)
- Adaptive Control Based Condition Monitoring of CNC MachineDocument10 pagesAdaptive Control Based Condition Monitoring of CNC MachineIJRASETPublicationsNo ratings yet
- EasyAsuro Manual V1.0Document18 pagesEasyAsuro Manual V1.0bozzecNo ratings yet
- Mobile Robot Wegy - Milos BozicDocument6 pagesMobile Robot Wegy - Milos BozicbozzecNo ratings yet
- PID Control in LabVIEW PDFDocument147 pagesPID Control in LabVIEW PDFRAFFI HASSAN BASHANo ratings yet
- Samsung Le-32!26!22c350d1 Chassis n82b SCH PLDocument4 pagesSamsung Le-32!26!22c350d1 Chassis n82b SCH PLbozzecNo ratings yet
- Servo Magazine 2007 07Document84 pagesServo Magazine 2007 07Ray NunezNo ratings yet
- Portugal 3 DC MotorsDocument7 pagesPortugal 3 DC MotorsbozzecNo ratings yet
- SInCOS EncoderDocument6 pagesSInCOS EncoderbozzecNo ratings yet
- Treadmill As ErgometerDocument6 pagesTreadmill As ErgometerbozzecNo ratings yet
- MOTION ControlDocument56 pagesMOTION ControlbozzecNo ratings yet
- Manual CoDeSys V23 EDocument478 pagesManual CoDeSys V23 Efujiwara_keitiNo ratings yet
- CANopen DSP402Document251 pagesCANopen DSP402bozzecNo ratings yet
- Remote Control of Electromagnetic Emulator For Electric MotorsDocument2 pagesRemote Control of Electromagnetic Emulator For Electric MotorsbozzecNo ratings yet
- Servo Magazine - 2007-01Document92 pagesServo Magazine - 2007-01Alice Jones100% (1)
- Logic Level BidirectionalDocument1 pageLogic Level BidirectionalbozzecNo ratings yet
- CANopen Dictionary v7Document67 pagesCANopen Dictionary v7bozzec100% (1)
- Overview of 3D Surface Digitization Technologies in EuropeDocument13 pagesOverview of 3D Surface Digitization Technologies in EuropebozzecNo ratings yet
- Compact Vision System For Monitoring of 3d Weld Pool Surface in PDocument103 pagesCompact Vision System For Monitoring of 3d Weld Pool Surface in PbozzecNo ratings yet
- Ahmed MDocument89 pagesAhmed MbozzecNo ratings yet
- Basic Principles of Stereoscopic 3D v1Document27 pagesBasic Principles of Stereoscopic 3D v1Tsm RafiNo ratings yet
- DTCDocument7 pagesDTCbozzecNo ratings yet
- GrafcetDocument21 pagesGrafcetbozzecNo ratings yet
- SFC and ST Programming LanguagesDocument137 pagesSFC and ST Programming LanguagesbozzecNo ratings yet
- SMD Marking CodeDocument3 pagesSMD Marking CodebozzecNo ratings yet
- Chapter 3.6 Pumps and Pumping SystemDocument22 pagesChapter 3.6 Pumps and Pumping Systemp_sach77No ratings yet
- Seminar Ski Rad LOGO! 1.1Document49 pagesSeminar Ski Rad LOGO! 1.1bozzecNo ratings yet
- Robot Positioning System Based On A Rotating ReceiverDocument5 pagesRobot Positioning System Based On A Rotating ReceiverbozzecNo ratings yet
- CND - Clinical Round ChecklistDocument2 pagesCND - Clinical Round ChecklistMona Ismail AlsomaliNo ratings yet
- D Praveen Kumar ChaubeyDocument2 pagesD Praveen Kumar ChaubeyyouvsyouNo ratings yet
- AAAC Guideline For Apartment and Townhouse Acoustic Rating 2010Document10 pagesAAAC Guideline For Apartment and Townhouse Acoustic Rating 2010Benjamín AlainNo ratings yet
- SikaRapid-2 2011-10 - 1 PDFDocument2 pagesSikaRapid-2 2011-10 - 1 PDFmehrdad_so1981No ratings yet
- Bernette Ramirez Mariano Bernette Ramirez MarianoDocument1 pageBernette Ramirez Mariano Bernette Ramirez Marianomia palacioNo ratings yet
- CFPA E Guideline No 19 2009 EVACUATION FROM BUILDINGS PDFDocument99 pagesCFPA E Guideline No 19 2009 EVACUATION FROM BUILDINGS PDFodemircioglu2No ratings yet
- Fatwa Darul Uloom Deoband - Vol 1Document276 pagesFatwa Darul Uloom Deoband - Vol 1Ahlehaq100% (3)
- Tan Tzu enDocument68 pagesTan Tzu enLoc HuynhNo ratings yet
- B.tech Regular Examination Fee Registration FormDocument1 pageB.tech Regular Examination Fee Registration FormvishwasNo ratings yet
- 496 - SSP481 - Audi A7 Onboard Power Supply and Networking PDFDocument40 pages496 - SSP481 - Audi A7 Onboard Power Supply and Networking PDFbenjaminhuku100% (5)
- Soccer Field Lighting DesignDocument22 pagesSoccer Field Lighting DesigndevakaNo ratings yet
- Cost BreakdownDocument241 pagesCost Breakdownbilisuma sebokaNo ratings yet
- Cryogenics Handbook PDFDocument227 pagesCryogenics Handbook PDFmangyanNo ratings yet
- Babies of 2010Document16 pagesBabies of 2010Sierra Nevada Media GroupNo ratings yet
- Concrete Mix Design 10Document1 pageConcrete Mix Design 10Rexter UnabiaNo ratings yet
- Chapter 6 SlidesDocument28 pagesChapter 6 Slidesshinde_jayesh2005No ratings yet
- Assign 3Document9 pagesAssign 3Yudha PP0% (1)
- Reviewer in Hairdressing (From Mastery Test)Document7 pagesReviewer in Hairdressing (From Mastery Test)peanut nutterNo ratings yet
- Battery CatalogueDocument6 pagesBattery CataloguerantaroNo ratings yet
- SVC Manual C2670 EngDocument146 pagesSVC Manual C2670 EngAnonymous 1lbWGmNo ratings yet
- Notice - Odd Sem End Semester Examinations 2022-23 - Phase 2 - Procedure - 020223Document1 pageNotice - Odd Sem End Semester Examinations 2022-23 - Phase 2 - Procedure - 020223pritamchandra007No ratings yet
- EEC 319 Engineer in The Society DocumentDocument3 pagesEEC 319 Engineer in The Society Documentgodspower odior100% (1)
- PCTDS 027 Fendolite MII Cold Wet Weather ApplicationDocument2 pagesPCTDS 027 Fendolite MII Cold Wet Weather ApplicationMohammed AhteshamNo ratings yet
- 115 Test Out Study GuideFeb2017Document16 pages115 Test Out Study GuideFeb2017Ashish MalikNo ratings yet
- Environmental AuditDocument22 pagesEnvironmental AuditungkumariamNo ratings yet
- Harbor GlenDocument31 pagesHarbor GlenElvis Felix fernandesNo ratings yet
- Training CoursesDocument16 pagesTraining CoursesFeroz KhanNo ratings yet
- Check List For Chilled Water Secondary Pump: Sl. No Description RemarksDocument2 pagesCheck List For Chilled Water Secondary Pump: Sl. No Description Remarkssiruslara6491No ratings yet
- Check ListDocument6 pagesCheck ListosersNo ratings yet
- E-Payment System On E-Commerce in India: Karamjeet Kaur, Dr. Ashutosh PathakDocument9 pagesE-Payment System On E-Commerce in India: Karamjeet Kaur, Dr. Ashutosh Pathakdharshinee1961No ratings yet