You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- MIT - Theory of Machines (AAE3152) End SemDocument2 pagesMIT - Theory of Machines (AAE3152) End SemVasudev GuptaNo ratings yet
- Catalogo RoscadorasDocument10 pagesCatalogo RoscadorasELIZABETH DIAZNo ratings yet
- Question Bank: Subject Code & Name: Me2203 Kinematics of Machinery Staff Incharge:B.SusilaDocument28 pagesQuestion Bank: Subject Code & Name: Me2203 Kinematics of Machinery Staff Incharge:B.SusilaAnonymous pXkq6u4HZjNo ratings yet
- Fette Tablet Press Replacement Parts CatalogDocument84 pagesFette Tablet Press Replacement Parts Catalogedsonlevi100% (1)
- Lenkungskomponenten GB PDFDocument37 pagesLenkungskomponenten GB PDFFastcross HondaNo ratings yet
- Transfer Case Disassembly and AssemblyDocument22 pagesTransfer Case Disassembly and AssemblyBasilio BancurNo ratings yet
- Loop TransferDocument8 pagesLoop TransferShemul VpNo ratings yet
- 4 - Mechanical Actuation Systems - v1Document8 pages4 - Mechanical Actuation Systems - v1joseph olojaNo ratings yet
- 05 - B - RTA 8 Series RTA 2 Series Fuel Pump UpdateDocument16 pages05 - B - RTA 8 Series RTA 2 Series Fuel Pump UpdateGiovanniJara100% (1)
- Lecturer Notes - Kinematics of MachineryDocument65 pagesLecturer Notes - Kinematics of Machineryehsan_shameli100% (1)
- Vertical DIY InstructionsDocument20 pagesVertical DIY InstructionsDangheliz Tobar UrzúaNo ratings yet
- Theory of Machine. Question BankDocument4 pagesTheory of Machine. Question BankPriyanka YadavNo ratings yet
- 10 Turn-Motorized Potentiometer Drive 10 Gang-MotorpotentiometerantriebDocument9 pages10 Turn-Motorized Potentiometer Drive 10 Gang-Motorpotentiometerantriebmiguel-No ratings yet
- Micro Switch Marca HoneywellDocument16 pagesMicro Switch Marca HoneywellErnesto GonzalezNo ratings yet
- Building A Cycloidal Drive With SolidworksDocument27 pagesBuilding A Cycloidal Drive With SolidworksMichele ChiodettoNo ratings yet
- Presentation w4 LD Tran Le NhuDocument41 pagesPresentation w4 LD Tran Le NhuTài Nguyễn Văn ThànhNo ratings yet
- Blanket Wash Up DeviceDocument12 pagesBlanket Wash Up DeviceSonia NaickerNo ratings yet
- Extreme Dynamics On Electronic Cam Linear DriveDocument8 pagesExtreme Dynamics On Electronic Cam Linear Drivepacojones8No ratings yet
- Indian CultureDocument26 pagesIndian CultureGokul GocoolNo ratings yet
- List of Experiments: Mandava Institute of Engineering and TechnologyDocument2 pagesList of Experiments: Mandava Institute of Engineering and TechnologyrkNo ratings yet
- g1 Theory of Machines ExperimentsDocument34 pagesg1 Theory of Machines ExperimentsBornea FlorinaNo ratings yet
- User Instructions: Installation Operation Maintenance Automax Valve Automation SystemsDocument16 pagesUser Instructions: Installation Operation Maintenance Automax Valve Automation Systemstpelly7No ratings yet
- Mccoy Clincher Casing TongDocument81 pagesMccoy Clincher Casing TongShag ShaggyNo ratings yet
- Manual Installation Operation Manual f10 Posiflex Positioner El o Matic en 86936Document10 pagesManual Installation Operation Manual f10 Posiflex Positioner El o Matic en 86936Flavin Medina0% (1)
- Juki MB-372 Instruction ManualDocument33 pagesJuki MB-372 Instruction Manualrosmel ricraNo ratings yet
- Pneumatic Positioner Type 3766 Electropneumatic Positioner Type 3767Document12 pagesPneumatic Positioner Type 3766 Electropneumatic Positioner Type 3767Garix LanuzixNo ratings yet
- Rexroth Hd2 ControlairDocument15 pagesRexroth Hd2 ControlairRafaelNo ratings yet
- Butterfly Emb Single Head Machine Parts BookDocument30 pagesButterfly Emb Single Head Machine Parts BookCambridge GTNo ratings yet
- BCN b62005 666 - ADocument18 pagesBCN b62005 666 - ARafael GagoNo ratings yet
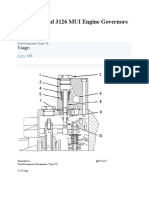
- 3114, 3116 and 3126 MUI Engine Governors Caterpillar: UsageDocument2 pages3114, 3116 and 3126 MUI Engine Governors Caterpillar: UsagezeljkoNo ratings yet