You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Piper Lance II - Turbo Lance II-Maintenance - smv1986Document568 pagesPiper Lance II - Turbo Lance II-Maintenance - smv1986willkobiNo ratings yet
- F3 Maths 2012 1stexam Paper1Document3 pagesF3 Maths 2012 1stexam Paper1YiuhangLeung100% (2)
- OCEN 201 Introduction To Ocean & Coastal EngineeringDocument28 pagesOCEN 201 Introduction To Ocean & Coastal EngineeringbalumaxNo ratings yet
- Types of EvidenceDocument13 pagesTypes of EvidenceSteven Jan Sab-itNo ratings yet
- PID-Controller Tuning Optimization With Genetic Algorithms in Servo SystemsDocument14 pagesPID-Controller Tuning Optimization With Genetic Algorithms in Servo SystemsAurel GSNo ratings yet
- Uncalibrated Neuro-Visual Servoing Control For Multiple Robot ArmsDocument12 pagesUncalibrated Neuro-Visual Servoing Control For Multiple Robot ArmsAurel GSNo ratings yet
- Vibration Control of Flexible Mode For A Beam-Type Substrate Transport RobotDocument7 pagesVibration Control of Flexible Mode For A Beam-Type Substrate Transport RobotAurel GSNo ratings yet
- Top-View-Based Guidance For Blind People Using Directional Ellipse ModelDocument13 pagesTop-View-Based Guidance For Blind People Using Directional Ellipse ModelAurel GSNo ratings yet
- Visual Trajectory-Tracking Model-Based Control For Mobile RobotsDocument12 pagesVisual Trajectory-Tracking Model-Based Control For Mobile RobotsAurel GSNo ratings yet
- ROV-Based Underwater Vision System For Intelligent Fish Ethology ResearchDocument9 pagesROV-Based Underwater Vision System For Intelligent Fish Ethology ResearchAurel GSNo ratings yet
- Lossless Geometry Compression Through Changing 3D Coordinates Into 1DDocument7 pagesLossless Geometry Compression Through Changing 3D Coordinates Into 1DAurel GSNo ratings yet
- Modelling Behaviour Patterns of Pedestrians For Mobile Robot Trajectory GenerationDocument11 pagesModelling Behaviour Patterns of Pedestrians For Mobile Robot Trajectory GenerationAurel GSNo ratings yet
- Kinematics and The Implementation of A Modular Caterpillar Robot in Trapezoidal Wave LocomotionDocument11 pagesKinematics and The Implementation of A Modular Caterpillar Robot in Trapezoidal Wave LocomotionAurel GSNo ratings yet
- Sensor Feature Selection and Combination For Stress Identification Using Combinatorial FusionDocument10 pagesSensor Feature Selection and Combination For Stress Identification Using Combinatorial FusionAurel GSNo ratings yet
- Micro Aerial Vehicle (MAV) Flapping Motion Control Using An Immune Network With Different Immune FactorsDocument9 pagesMicro Aerial Vehicle (MAV) Flapping Motion Control Using An Immune Network With Different Immune FactorsAurel GSNo ratings yet
- TMP 2 DEEDocument13 pagesTMP 2 DEEFrontiersNo ratings yet
- Compliant Leg Architectures and A Linear Control Strategy For The Stable Running of Planar Biped RobotsDocument13 pagesCompliant Leg Architectures and A Linear Control Strategy For The Stable Running of Planar Biped RobotsAurel GSNo ratings yet
- Design and Real-Time Control of A 4-DOF Biped RobotDocument11 pagesDesign and Real-Time Control of A 4-DOF Biped RobotAurel GSNo ratings yet
- Balanced Motions Realization For A Mechanical Regulators Free and Front-Wheel Drive Bicycle Robot Under Zero Forward SpeedDocument9 pagesBalanced Motions Realization For A Mechanical Regulators Free and Front-Wheel Drive Bicycle Robot Under Zero Forward SpeedAurel GSNo ratings yet
- Dynamic Modelling and Trajectory Tracking of Parallel Manipulator With Flexible LinkDocument9 pagesDynamic Modelling and Trajectory Tracking of Parallel Manipulator With Flexible LinkAurel GSNo ratings yet
- Dynamic Positioning of Underwater Robotic Vehicles With Thruster Dynamics CompensationDocument8 pagesDynamic Positioning of Underwater Robotic Vehicles With Thruster Dynamics CompensationAurel GSNo ratings yet
- A Path Tracking Algorithm Using Future Prediction Control With Spike Detection For An Autonomous Vehicle RobotDocument9 pagesA Path Tracking Algorithm Using Future Prediction Control With Spike Detection For An Autonomous Vehicle RobotAurel GSNo ratings yet
- A Specification Patterns System For Discrete Event Systems AnalysisDocument13 pagesA Specification Patterns System For Discrete Event Systems AnalysisAurel GSNo ratings yet
- A Synergistic Approach For Recovering Occlusion-Free Textured 3D Maps of Urban Facades From Heterogeneous Cartographic DataDocument10 pagesA Synergistic Approach For Recovering Occlusion-Free Textured 3D Maps of Urban Facades From Heterogeneous Cartographic DataAurel GSNo ratings yet
- A Novel Temperature Compensation Method For A MEMS Gyroscope Oriented On A Periphery CircuitDocument10 pagesA Novel Temperature Compensation Method For A MEMS Gyroscope Oriented On A Periphery CircuitAurel GSNo ratings yet
- Distance Computation Between Non-Holonomic Motions With Constant AccelerationsDocument15 pagesDistance Computation Between Non-Holonomic Motions With Constant AccelerationsAurel GSNo ratings yet
- A Path Tracking Algorithm Using Future Prediction Control With Spike Detection For An Autonomous Vehicle RobotDocument9 pagesA Path Tracking Algorithm Using Future Prediction Control With Spike Detection For An Autonomous Vehicle RobotAurel GSNo ratings yet
- A New Hybrid Approach For Augmented Reality Maintenance in Scientific FacilitiesDocument10 pagesA New Hybrid Approach For Augmented Reality Maintenance in Scientific FacilitiesAurel GSNo ratings yet
- A Fast and High-Resolution Multi-Target Localization Approach in MIMO RadarDocument8 pagesA Fast and High-Resolution Multi-Target Localization Approach in MIMO RadarAurel GSNo ratings yet
- A Highest Order Hypothesis Compatibility Test For Monocular SLAMDocument11 pagesA Highest Order Hypothesis Compatibility Test For Monocular SLAMAurel GSNo ratings yet
- The Mechanism of A Snake-Like Robot's Clamping Obstacle Navigation On High Voltage Transmission LinesDocument14 pagesThe Mechanism of A Snake-Like Robot's Clamping Obstacle Navigation On High Voltage Transmission LinesAurel GSNo ratings yet
- Robot Visual Tracking Via Incremental Self-Updating of Appearance ModelDocument11 pagesRobot Visual Tracking Via Incremental Self-Updating of Appearance ModelAurel GSNo ratings yet
- ED 107 162 Author Morphology. Pub Date Aug 69 Note Austin Edrs Price MF-$O.76 DescriptorsDocument75 pagesED 107 162 Author Morphology. Pub Date Aug 69 Note Austin Edrs Price MF-$O.76 DescriptorsTalha KhanNo ratings yet
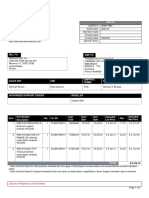
- Quote: Quotation Prepared By: Sloan SellersDocument2 pagesQuote: Quotation Prepared By: Sloan SellersRubén CastañoNo ratings yet
- Introduction Unit Short Test 1B Grammar, Vocabulary, and VerbsDocument1 pageIntroduction Unit Short Test 1B Grammar, Vocabulary, and VerbsDimitar IvanovNo ratings yet
- Updated Official All Campuses ON CAMPUS Final Exams Schedule Spring 2021-22 Plan BDocument11 pagesUpdated Official All Campuses ON CAMPUS Final Exams Schedule Spring 2021-22 Plan BMohammad SafadiehNo ratings yet
- Tester Sursa Gembird CHM 03 ManualDocument15 pagesTester Sursa Gembird CHM 03 Manualzavaidoc70No ratings yet
- Analytical ExpositionDocument7 pagesAnalytical ExpositionEman FakotNo ratings yet
- ARHITECTURA Si FOCULDocument282 pagesARHITECTURA Si FOCULTheodor DinuNo ratings yet
- Hemera Creality CR10s Pro Upgrade Guide (Edition 1)Document24 pagesHemera Creality CR10s Pro Upgrade Guide (Edition 1)gumushNo ratings yet
- Bing WorksheetDocument3 pagesBing WorksheetFrutti MataniNo ratings yet
- Floor Heating Controls Wiring Instructions for FS and BA Master Weather CompensationDocument12 pagesFloor Heating Controls Wiring Instructions for FS and BA Master Weather Compensationjamppajoo2No ratings yet
- Johnson RPM Chart Evinrude E-Tec RPM Chart Mercury 4-Stroke RPM ChartDocument2 pagesJohnson RPM Chart Evinrude E-Tec RPM Chart Mercury 4-Stroke RPM ChartUlf NymanNo ratings yet
- Thrust Equation For A Turbofan Double Inlet/Outlet: Joshtheengineer April 8, 2017Document7 pagesThrust Equation For A Turbofan Double Inlet/Outlet: Joshtheengineer April 8, 2017Muhammad RidwanNo ratings yet
- Business Conclave - Concept DesignDocument3 pagesBusiness Conclave - Concept DesignSajal GuptaNo ratings yet
- Western Preços - SPDocument28 pagesWestern Preços - SPRobertaoJasperNo ratings yet
- Academic SummaryDocument4 pagesAcademic SummaryJacqui PendergastNo ratings yet
- 7 Barriers To Implementing and Maintaining An Effective HRM FunctionDocument13 pages7 Barriers To Implementing and Maintaining An Effective HRM FunctionPaing Hein KyawNo ratings yet
- DSP Lab - ScilabDocument17 pagesDSP Lab - ScilabSai Nikshipth MaddhugaruNo ratings yet
- 4 Compass SurveyingDocument10 pages4 Compass SurveyingSuson DhitalNo ratings yet
- Viking Tech ARG03FTC2551 - C217943Document8 pagesViking Tech ARG03FTC2551 - C217943ALIRIO SOLANONo ratings yet
- Phase-Field Models For The Evolution of Complex SystemsDocument37 pagesPhase-Field Models For The Evolution of Complex SystemsMathis PlappNo ratings yet
- Beck Thinking and Depression Idiosyncratic Content and Cognitive DistortionsDocument10 pagesBeck Thinking and Depression Idiosyncratic Content and Cognitive DistortionsFrancisco GaravagliaNo ratings yet
- Upto 62rd BPSC Mechanical Question BankDocument140 pagesUpto 62rd BPSC Mechanical Question BankASHISH KUMAR SINGHNo ratings yet
- A Thesis 123Document77 pagesA Thesis 123Meli SafiraNo ratings yet
- Maintenance Manual - Booms: S Booms Z BoomsDocument185 pagesMaintenance Manual - Booms: S Booms Z BoomsRafael Vieira De AssisNo ratings yet
- Mobil Dynagear Series Performance ProfileDocument2 pagesMobil Dynagear Series Performance ProfileXavier DiazNo ratings yet
- Frankfurt School taxes and ideology critiqueDocument5 pagesFrankfurt School taxes and ideology critiqueErnesto BulnesNo ratings yet