You might also like
- Image Processing and GIS for Remote Sensing: Techniques and ApplicationsFrom EverandImage Processing and GIS for Remote Sensing: Techniques and ApplicationsNo ratings yet
- Computer Processing of Remotely-Sensed Images: An IntroductionFrom EverandComputer Processing of Remotely-Sensed Images: An IntroductionNo ratings yet
- Introduction to Digital Mapping: The Power and PossibilitiesDocument11 pagesIntroduction to Digital Mapping: The Power and Possibilitieshelmy mukti100% (1)
- Web Mapping? Why? How?: Isn't Google Enough?Document33 pagesWeb Mapping? Why? How?: Isn't Google Enough?irenepinedoNo ratings yet
- Tribhuwan University: Department of Computer Science and Information Technology B.SC - CSIT ProgrammeDocument90 pagesTribhuwan University: Department of Computer Science and Information Technology B.SC - CSIT Programmesarbodaya maviNo ratings yet
- What Is Special About Spatial DataDocument11 pagesWhat Is Special About Spatial Data18026 Tajkia Jahan RakhiNo ratings yet
- Mobile MappingDocument5 pagesMobile MappingNorthern Engineering SurveysNo ratings yet
- Elementary GIS Tools AssignmentDocument10 pagesElementary GIS Tools AssignmentfaizakhurshidNo ratings yet
- History of GISDocument2 pagesHistory of GISAyesha AeonNo ratings yet
- Database Management System 1: E-Module inDocument30 pagesDatabase Management System 1: E-Module inJanah Andrea RiveraNo ratings yet
- Technical Proposal Smart Gis: Desktop & Web & Mobile© GIS ApplicationDocument16 pagesTechnical Proposal Smart Gis: Desktop & Web & Mobile© GIS ApplicationAdnan BuyungNo ratings yet
- Georeferencing A MapDocument12 pagesGeoreferencing A MapLia MelinaNo ratings yet
- Communication Systems Engineering Msc. Program Project Proposal OnDocument21 pagesCommunication Systems Engineering Msc. Program Project Proposal OnDagne SoliyanaNo ratings yet
- IEQ-05 Geographic Information Systems NotesDocument16 pagesIEQ-05 Geographic Information Systems NotesIshani GuptaNo ratings yet
- Gis 120806062310 Phpapp01Document17 pagesGis 120806062310 Phpapp01vanamgouthamNo ratings yet
- Spatial Analyst BroDocument4 pagesSpatial Analyst Brosasa.vukojeNo ratings yet
- What Is Vehicle Tracking?Document3 pagesWhat Is Vehicle Tracking?naanthaanda123No ratings yet
- Free and Open Source Web MappingDocument0 pagesFree and Open Source Web Mappinglot4No ratings yet
- Advantages and Disadvantages of GeographDocument3 pagesAdvantages and Disadvantages of GeographRiri JonsohnNo ratings yet
- Finding A Route TutorialDocument17 pagesFinding A Route TutorialArda YoungNo ratings yet
- ECognition Reference BookDocument195 pagesECognition Reference BookYoniarHufanRamadhaniNo ratings yet
- Seminar on GIS Components and ApplicationsDocument33 pagesSeminar on GIS Components and ApplicationsrishiprakashNo ratings yet
- GeoreferencingDocument21 pagesGeoreferencingsurvey17gr100% (1)
- Arc GisDocument5 pagesArc GisAlvaro FelipeNo ratings yet
- Course 5 Data StructureDocument28 pagesCourse 5 Data StructurePankaj Mittal100% (2)
- Arcmap Tutorial PDFDocument58 pagesArcmap Tutorial PDFJerry FirmansyaNo ratings yet
- Erdas Book by - Hassan MohamedDocument116 pagesErdas Book by - Hassan Mohamedomer1243No ratings yet
- Iso 19100 Series of Geographic Information Standards: (Submitted by The Secretariat)Document17 pagesIso 19100 Series of Geographic Information Standards: (Submitted by The Secretariat)Sella SerafinaNo ratings yet
- It Hold An Very Good Article On Geographical Information System ModeldDocument15 pagesIt Hold An Very Good Article On Geographical Information System ModeldnagaidlNo ratings yet
- Lecture Note Gis-SYMDocument15 pagesLecture Note Gis-SYMNikita BhagatNo ratings yet
- GIS IntroDocument20 pagesGIS Intropravi4444No ratings yet
- Geographic Information Systems and Spatial StatisticsDocument45 pagesGeographic Information Systems and Spatial Statisticssebastion jensonNo ratings yet
- Best Practices for Optimizing Web MapsDocument21 pagesBest Practices for Optimizing Web MapsmarcobonillaaNo ratings yet
- Dem Erdas ImagineDocument11 pagesDem Erdas ImagineMohannad S ZebariNo ratings yet
- Esri Potential Sites ExerciseDocument8 pagesEsri Potential Sites ExerciseBernice GonzalezNo ratings yet
- Geographical Information SystemDocument19 pagesGeographical Information SystemSolomon olorunlekeNo ratings yet
- GIS Data Types: Vector vs. RasterDocument1 pageGIS Data Types: Vector vs. RasterbebebrendaNo ratings yet
- Review QuestionsDocument14 pagesReview QuestionsBooNo ratings yet
- Geographic Information Systems: Lecture - IDocument29 pagesGeographic Information Systems: Lecture - ISanthosh JithendraNo ratings yet
- 3 GIS Data StructureDocument31 pages3 GIS Data StructurePujhaFransismikSadegaNo ratings yet
- GisDocument36 pagesGisanyak1167032No ratings yet
- Gis Analysis and ModellingDocument16 pagesGis Analysis and ModellingAndreas TariganNo ratings yet
- ERDAS IMAGINE 2013 Product DescriptionDocument30 pagesERDAS IMAGINE 2013 Product DescriptionHendro SubagioNo ratings yet
- Overview of GisDocument67 pagesOverview of Gisajaykumar988No ratings yet
- Book1 (Version 1) .XLSBDocument19 pagesBook1 (Version 1) .XLSBAlx Leon TNo ratings yet
- GIS SlidesDocument98 pagesGIS SlidesdjkmogNo ratings yet
- GISDocument112 pagesGISA K SubramaniNo ratings yet
- Lecture 01: Introduction To GIS and GIS Data ModelsDocument61 pagesLecture 01: Introduction To GIS and GIS Data ModelsFidel Huanco RamosNo ratings yet
- Arcgis Spatial AnalystDocument17 pagesArcgis Spatial AnalysthanggarPKNo ratings yet
- Introduction to GIS Fundamentals and ApplicationsDocument57 pagesIntroduction to GIS Fundamentals and ApplicationsAddo MawuloloNo ratings yet
- GPS Based Travel Mode Detection Using ANNDocument19 pagesGPS Based Travel Mode Detection Using ANNvarunsingh214761No ratings yet
- Unit - 1Document20 pagesUnit - 1sombansNo ratings yet
- Introduction To QGIS Revision3Document134 pagesIntroduction To QGIS Revision3Vilma Baltazar AganusNo ratings yet
- Daily Nation 22.05.2014Document88 pagesDaily Nation 22.05.2014Zachary MonroeNo ratings yet
- Geographical Information System: - To Answer Apparently Simple Geographic Question LikeDocument18 pagesGeographical Information System: - To Answer Apparently Simple Geographic Question LikeShani ShahNo ratings yet
- Urban Remote Sensing: Monitoring, Synthesis and Modeling in the Urban EnvironmentFrom EverandUrban Remote Sensing: Monitoring, Synthesis and Modeling in the Urban EnvironmentNo ratings yet
- Introducing Geographic Information Systems with ArcGIS: A Workbook Approach to Learning GISFrom EverandIntroducing Geographic Information Systems with ArcGIS: A Workbook Approach to Learning GISRating: 3 out of 5 stars3/5 (1)
- Preferred Electronic Data Interchange Standards (EDIS) For The Container IndustryDocument51 pagesPreferred Electronic Data Interchange Standards (EDIS) For The Container Industryjuan.vargas.calle6904No ratings yet
- Environmental Management Plan - MatrixDocument6 pagesEnvironmental Management Plan - Matrixplokhande47100% (1)
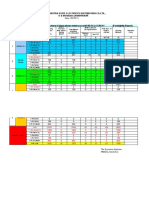
- Maharashtra State Electricity Distribution Co - LTD., O & M Division, NANDURBARDocument3 pagesMaharashtra State Electricity Distribution Co - LTD., O & M Division, NANDURBARPuru BornareNo ratings yet
- Resume Mithun UpdatedDocument7 pagesResume Mithun UpdatedmithunNo ratings yet
- Hydran 201ti Gea12933 HRDocument2 pagesHydran 201ti Gea12933 HRlxd.hepNo ratings yet
- Sda-02-Dd-02 - Pile & Pile Cap - Sheet-1 - R0Document1 pageSda-02-Dd-02 - Pile & Pile Cap - Sheet-1 - R0Himani PatelNo ratings yet
- NV 24 Globe ActuatorDocument12 pagesNV 24 Globe ActuatorRodrigo AlvesNo ratings yet
- W6 ReadmeDocument15 pagesW6 ReadmewerewNo ratings yet
- cs2071 New Notes 1Document34 pagescs2071 New Notes 1intelinsideocNo ratings yet
- Oracle PLSQL Best Practices and Tuning PDFDocument270 pagesOracle PLSQL Best Practices and Tuning PDFKeyur Pandya100% (1)
- HPLaserJetProMFPM426fdn PDFDocument2 pagesHPLaserJetProMFPM426fdn PDFOpština LebaneNo ratings yet
- Model A360 CatalogDocument12 pagesModel A360 CatalogThomas StempienNo ratings yet
- Experiment 1 Phy 360Document14 pagesExperiment 1 Phy 360Mohd Khairul0% (2)
- Pid Handbook 1002-02 PDFDocument94 pagesPid Handbook 1002-02 PDFMUHAMMAD TAUFEEQNo ratings yet
- SuperStr 14Document1 pageSuperStr 14Poshan DhunganaNo ratings yet
- True/False: List of Attempted Questions and AnswersDocument15 pagesTrue/False: List of Attempted Questions and AnswersDeepak Kumar VermaNo ratings yet
- 1302 FF6SF6DosingMachine 0Document3 pages1302 FF6SF6DosingMachine 0Fawzi ChakirNo ratings yet
- PACK PAR BoilersDocument31 pagesPACK PAR BoilersJosé MacedoNo ratings yet
- AeDocument12 pagesAeRoberto SanchezNo ratings yet
- 1 s2.0 S0950061822007966 MainDocument20 pages1 s2.0 S0950061822007966 MainmohammadNo ratings yet
- 6.2.1.11 Dyan Indrayanto - Anatomy of MalwareDocument3 pages6.2.1.11 Dyan Indrayanto - Anatomy of MalwareDyan IndrayantoNo ratings yet
- A Study On Customer Satisfaction Towards Online Banking ServicesDocument12 pagesA Study On Customer Satisfaction Towards Online Banking ServicesEditor IJTSRD100% (1)
- AGA3Document1 pageAGA3Alan BkNo ratings yet
- Visit To Kadana Hydro Power Plant and Wanakbori Thermal Power Plant.Document5 pagesVisit To Kadana Hydro Power Plant and Wanakbori Thermal Power Plant.Kunal VaghasiyaNo ratings yet
- EECS 373 Architecture, Assembly, and ABI LectureDocument29 pagesEECS 373 Architecture, Assembly, and ABI Lectureavinash_yuvarajNo ratings yet
- ALFA 4000 - Peru 2 PDFDocument2 pagesALFA 4000 - Peru 2 PDFErick MaderoNo ratings yet
- Owner'S Manual: PLDVD134FDocument20 pagesOwner'S Manual: PLDVD134FalphasoundNo ratings yet
- Manufacturing Technology Question Papers of JntuaDocument15 pagesManufacturing Technology Question Papers of JntuaHimadhar SaduNo ratings yet
- 12 585 Rov Latches Brochure v3 Web 1 PDFDocument8 pages12 585 Rov Latches Brochure v3 Web 1 PDFIZayvenkoNo ratings yet
- Trajectory ClusteringDocument58 pagesTrajectory ClusteringPetrick Gonzalez PerezNo ratings yet