You might also like
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Book 2Document17 pagesBook 2Adam HansenNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Uncertainty Estimation in Neural Networks Through Multi-Task LearningDocument13 pagesUncertainty Estimation in Neural Networks Through Multi-Task LearningAdam HansenNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- An Authorship Identification Empirical Evaluation of Writing Style Features in Cross-Topic and Cross-Genre DocumentsDocument14 pagesAn Authorship Identification Empirical Evaluation of Writing Style Features in Cross-Topic and Cross-Genre DocumentsAdam HansenNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Spot-The-Camel: Computer Vision For Safer RoadsDocument10 pagesSpot-The-Camel: Computer Vision For Safer RoadsAdam HansenNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- EDGE-Net: Efficient Deep-Learning Gradients Extraction NetworkDocument15 pagesEDGE-Net: Efficient Deep-Learning Gradients Extraction NetworkAdam HansenNo ratings yet
- Psychological Emotion Recognition of Students Using Machine Learning Based ChatbotDocument11 pagesPsychological Emotion Recognition of Students Using Machine Learning Based ChatbotAdam Hansen100% (1)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Comparison of Document Similarity AlgorithmsDocument10 pagesA Comparison of Document Similarity AlgorithmsAdam HansenNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Design That Uses Ai To Overturn Stereotypes: Make Witches Wicked AgainDocument12 pagesDesign That Uses Ai To Overturn Stereotypes: Make Witches Wicked AgainAdam HansenNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Development of An Intelligent Vital Sign Monitoring Robot SystemDocument21 pagesDevelopment of An Intelligent Vital Sign Monitoring Robot SystemAdam HansenNo ratings yet
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- Investigating The Effect of Bd-Craft To Text Detection AlgorithmsDocument16 pagesInvestigating The Effect of Bd-Craft To Text Detection AlgorithmsAdam HansenNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Call For Papers - International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesCall For Papers - International Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- Adpp: A Novel Anomaly Detection and Privacy-Preserving Framework Using Blockchain and Neural Networks in TokenomicsDocument16 pagesAdpp: A Novel Anomaly Detection and Privacy-Preserving Framework Using Blockchain and Neural Networks in TokenomicsAdam HansenNo ratings yet
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- Converting Real Human Avatar To Cartoon Avatar Utilizing CycleganDocument15 pagesConverting Real Human Avatar To Cartoon Avatar Utilizing CycleganAdam HansenNo ratings yet
- A Systematic Study of Deep Learning Architectures For Analysis of Glaucoma and Hypertensive RetinopathyDocument17 pagesA Systematic Study of Deep Learning Architectures For Analysis of Glaucoma and Hypertensive RetinopathyAdam HansenNo ratings yet
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- Improving Explanations of Image Classifiers: Ensembles and Multitask LearningDocument22 pagesImproving Explanations of Image Classifiers: Ensembles and Multitask LearningAdam HansenNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Ijaia 01Document15 pagesIjaia 01Adam HansenNo ratings yet
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- ThesisDocument74 pagesThesisTrịnh HùngNo ratings yet
- TestDocument126 pagesTestGar LewisNo ratings yet
- Intro ML For QuantsDocument51 pagesIntro ML For QuantsCoralieNo ratings yet
- Mathematics 2023 (65-4-2) Set-2Document49 pagesMathematics 2023 (65-4-2) Set-2prajjwalroyroyNo ratings yet
- Ged 102 Exercise 3 Module 1 1Q 2021-2022Document3 pagesGed 102 Exercise 3 Module 1 1Q 2021-2022DES MOSNo ratings yet
- Chapter IIIDocument3 pagesChapter IIIMark Jayson Pampag MuycoNo ratings yet
- Keysight ADS Example Book CH 02 - Tuning and Optimization 5992-1376Document11 pagesKeysight ADS Example Book CH 02 - Tuning and Optimization 5992-1376jumper_bonesNo ratings yet
- Consequence Assessment of Chlorine Release: A A B ADocument3 pagesConsequence Assessment of Chlorine Release: A A B Azhexiong_zengNo ratings yet
- 2 Sampling and Sampling TechniquesDocument73 pages2 Sampling and Sampling TechniquesJozen RyanNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Partial Fractions: Undetermined CoefficientsDocument7 pagesPartial Fractions: Undetermined CoefficientsHarshavardhan ManjunathNo ratings yet
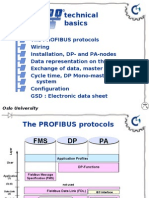
- Technical Basics: Oslo University CollegeDocument19 pagesTechnical Basics: Oslo University Collegesurendratv2007No ratings yet
- Hashtable #Include #Include #Include #IncludeDocument4 pagesHashtable #Include #Include #Include #IncludePaulina VoicuNo ratings yet
- CE50P-2: Numerical Solution To Engineering ProblemsDocument21 pagesCE50P-2: Numerical Solution To Engineering ProblemshgfhfghfghgNo ratings yet
- A While Loop Statement in C Programming Language Repeatedly Executes A Target Statement As Long As A Given Condition Is TrueDocument16 pagesA While Loop Statement in C Programming Language Repeatedly Executes A Target Statement As Long As A Given Condition Is TrueMd Sakawat HossainNo ratings yet
- AES Rijndael Algorithm (PPT REPORT)Document16 pagesAES Rijndael Algorithm (PPT REPORT)Sam HernandezNo ratings yet
- Lecture22 3Document15 pagesLecture22 3Beverly PamanNo ratings yet
- Week 2Document6 pagesWeek 2ROMY JOHN SALVACION BONTANONNo ratings yet
- 2nd Quaarter ExamDocument2 pages2nd Quaarter ExamJoana Marie DeontoyNo ratings yet
- 3.5 Inverse Trig FunctionsDocument6 pages3.5 Inverse Trig FunctionsZazliana Izatti100% (1)
- Clutch PDFDocument4 pagesClutch PDFHarish KuppusamyNo ratings yet
- 9231 Scheme of Work Paper 2 (For Examination From 2020)Document23 pages9231 Scheme of Work Paper 2 (For Examination From 2020)Arash RastiNo ratings yet
- CIRP Annals - Manufacturing Technology: Lihui Wang (1), Wei Wang, Dawei LiuDocument4 pagesCIRP Annals - Manufacturing Technology: Lihui Wang (1), Wei Wang, Dawei LiuSudeep Kumar SinghNo ratings yet
- Lec06 - Ordinary Differential Equations (BVP) - Shooting MethodsDocument39 pagesLec06 - Ordinary Differential Equations (BVP) - Shooting MethodsALYAMITHA NADIYAH SYAFITRI BAUDNo ratings yet
- CFDADVDocument183 pagesCFDADVKumar ChowdaryNo ratings yet
- Topic 4. Probability: Sample SpaceDocument42 pagesTopic 4. Probability: Sample SpaceAeroNo ratings yet
- Master Memory MapDocument308 pagesMaster Memory MapgamerhobbistaNo ratings yet
- MBAN-603DE - Decision Making Methods & ToolsDocument3 pagesMBAN-603DE - Decision Making Methods & ToolsJeremy JarvisNo ratings yet
- The Neural StrategyDocument102 pagesThe Neural StrategyGoran Stevanovic50% (2)
- This Study Resource Was: Civil Engineering LawDocument3 pagesThis Study Resource Was: Civil Engineering LawCn cnNo ratings yet
- Algorithms to Live By: The Computer Science of Human DecisionsFrom EverandAlgorithms to Live By: The Computer Science of Human DecisionsRating: 4.5 out of 5 stars4.5/5 (722)
- The Future of Geography: How the Competition in Space Will Change Our WorldFrom EverandThe Future of Geography: How the Competition in Space Will Change Our WorldRating: 4 out of 5 stars4/5 (6)
- Chaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyFrom EverandChaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyRating: 3.5 out of 5 stars3.5/5 (111)
- Microsoft Outlook Guide to Success: Learn Smart Email Practices and Calendar Management for a Smooth Workflow [II EDITION]From EverandMicrosoft Outlook Guide to Success: Learn Smart Email Practices and Calendar Management for a Smooth Workflow [II EDITION]Rating: 5 out of 5 stars5/5 (5)
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.From EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Rating: 5 out of 5 stars5/5 (34)
- Generative AI: The Insights You Need from Harvard Business ReviewFrom EverandGenerative AI: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (2)