You might also like
- Lecture5 LQR PDFDocument54 pagesLecture5 LQR PDFHữu Thịnh ĐỗNo ratings yet
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- Lecture 3 - 2Document42 pagesLecture 3 - 2faruktokuslu16No ratings yet
- Simulink Basics TutorialDocument143 pagesSimulink Basics TutorialHiếu HuỳnhNo ratings yet
- º Y'& Yyy Y YYY Yyyyyy Yyyy Y Yyy Y Yyyyyyy YY Yyyyyy Y Y Y Yy Yy Yyy Y Y Yyyyyyyyyyy !"yy &yyy Yyyyy +yyyyyyyDocument11 pagesº Y'& Yyy Y YYY Yyyyyy Yyyy Y Yyy Y Yyyyyyy YY Yyyyyy Y Y Y Yy Yy Yyy Y Y Yyyyyyyyyyy !"yy &yyy Yyyyy +yyyyyyyShaik Saheb ShaikNo ratings yet
- Slide 2Document89 pagesSlide 2EnesVSNo ratings yet
- Control Exp 03Document10 pagesControl Exp 03nipudasNo ratings yet
- AppendixDocument16 pagesAppendixSushant YadavNo ratings yet
- 8 Control Basics PDFDocument79 pages8 Control Basics PDFshihabNo ratings yet
- Chapter 4 ControlDocument44 pagesChapter 4 ControlFootball HDNo ratings yet
- Lecture 1 Non Linear ControlDocument21 pagesLecture 1 Non Linear ControlShivan BiradarNo ratings yet
- Second Order 2Document30 pagesSecond Order 2rajneesh singhNo ratings yet
- Analysis Via State SpaceDocument24 pagesAnalysis Via State SpaceYusafxai YxaiNo ratings yet
- Debre Tabor University: Faculty of Technology Department of Electromechanical EngineeringDocument46 pagesDebre Tabor University: Faculty of Technology Department of Electromechanical EngineeringBIRSHNo ratings yet
- 1.1 Nonlinear Model and Nonlinear Phenomena: U U X X T F X U U X X T F XDocument7 pages1.1 Nonlinear Model and Nonlinear Phenomena: U U X X T F X U U X X T F XGuilherme Brolin GatoNo ratings yet
- 4150 Lab 3Document6 pages4150 Lab 3Tan Nguyen VanNo ratings yet
- Feedback Linearization and LQ Based Constrained Predictive ControlDocument19 pagesFeedback Linearization and LQ Based Constrained Predictive ControlTran Van ThucNo ratings yet
- Control system-II: Department of Electrical EngineeringDocument17 pagesControl system-II: Department of Electrical Engineeringpala abishayNo ratings yet
- State Observer - Wikipedia, The Free EncyclopediaDocument6 pagesState Observer - Wikipedia, The Free EncyclopediaNhà Của CọpNo ratings yet
- Experiment No 1 Analysis of Control System ParametersDocument6 pagesExperiment No 1 Analysis of Control System Parameterspratik KumarNo ratings yet
- Laplace TTDocument56 pagesLaplace TTFares AlghamdiNo ratings yet
- CS491/691: Introduction To Aerial Robotics: Topic: LQR Flight ControlDocument40 pagesCS491/691: Introduction To Aerial Robotics: Topic: LQR Flight ControlFlorea Maria BiancaNo ratings yet
- ELM 322, Control Systems Control Systems Spring 2015Document37 pagesELM 322, Control Systems Control Systems Spring 2015kaanNo ratings yet
- Sufficient Conditions For Invariance ControlDocument6 pagesSufficient Conditions For Invariance Controllenoirstephane42No ratings yet
- Factorization of Boundary Value Problems Using the Invariant Embedding MethodFrom EverandFactorization of Boundary Value Problems Using the Invariant Embedding MethodNo ratings yet
- Chap - 1 - Static Optimization - 1.1 - 2014Document57 pagesChap - 1 - Static Optimization - 1.1 - 2014Asma FarooqNo ratings yet
- Chapter 4Document86 pagesChapter 4TejkumarigurungNo ratings yet
- Inverted Pendulum State-Space Methods For Controller DesignDocument16 pagesInverted Pendulum State-Space Methods For Controller DesignReyes_nNo ratings yet
- Introducción PDFDocument14 pagesIntroducción PDFsalimNo ratings yet
- InTech-Switching Control in The Presence of Constraints and Unmodeled DynamicsDocument12 pagesInTech-Switching Control in The Presence of Constraints and Unmodeled DynamicsIvanko Yannick Yanque TomasevichNo ratings yet
- Expt 4 First Order SystemDocument4 pagesExpt 4 First Order SystemAngelo Legarda De CastroNo ratings yet
- Singular PerturbationDocument37 pagesSingular PerturbationshubhobrataNo ratings yet
- Feedback Linearization - Nonlinear ControlDocument4 pagesFeedback Linearization - Nonlinear ControlmCmAlNo ratings yet
- Linear Quadratic Regulator: Function Is Used in Parameter EstimationDocument4 pagesLinear Quadratic Regulator: Function Is Used in Parameter EstimationMuhammad KhanNo ratings yet
- Kamel 2017Document37 pagesKamel 2017jingNo ratings yet
- An Introduction To Nonlinear Model Predictive ControlDocument23 pagesAn Introduction To Nonlinear Model Predictive ControlsaeedNo ratings yet
- Luenberger ObserversDocument4 pagesLuenberger ObserversMariam YaseenNo ratings yet
- Exp01 EEE318Document7 pagesExp01 EEE318Abid AbdullahNo ratings yet
- CH 1Document12 pagesCH 1Keneni AlemayehuNo ratings yet
- Presentation For ControllerDocument42 pagesPresentation For ControllerAlakshendra JohariNo ratings yet
- The Uncontrolled System, or "Plant":: G, Which Is NOT Subject To Modification by The Designer (Shown in I (T) o (T)Document9 pagesThe Uncontrolled System, or "Plant":: G, Which Is NOT Subject To Modification by The Designer (Shown in I (T) o (T)hkajaiNo ratings yet
- MECH6091 - Poject1.Flight Control Systems - Qball Quadrotor HelicopterDocument28 pagesMECH6091 - Poject1.Flight Control Systems - Qball Quadrotor HelicopterOmar MalikNo ratings yet
- Shubhobrata Rudra Presentation On Backstepping Control1Document139 pagesShubhobrata Rudra Presentation On Backstepping Control1Shubho RudraNo ratings yet
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Document183 pagesControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Anik PaulNo ratings yet
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFDocument183 pagesControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFShakil Ahmed100% (1)
- Chapter 8 ControlDocument96 pagesChapter 8 ControlDESHMUKH ANKIT PRAKASHRAONo ratings yet
- LQRDocument5 pagesLQRdrjoshreeNo ratings yet
- 01 Introduction 2nd Order Systems OLDDocument28 pages01 Introduction 2nd Order Systems OLDamitshukla.iitkNo ratings yet
- State SpaceDocument101 pagesState SpaceShivam AroraNo ratings yet
- Lab3 2Document49 pagesLab3 2علاء الدين العولقيNo ratings yet
- EEN-305 Advanced Control Systems Lab ReportDocument16 pagesEEN-305 Advanced Control Systems Lab ReportRitik MathurNo ratings yet
- Lab No. 4-System Stabilty Using Routh Table, Root LocusDocument4 pagesLab No. 4-System Stabilty Using Routh Table, Root LocusAshno KhanNo ratings yet
- Robust H output-feedback control of systems with time-delay: 夡 V. Suplin, U. ShakedDocument7 pagesRobust H output-feedback control of systems with time-delay: 夡 V. Suplin, U. ShakedRaminptNo ratings yet
- Lec13 - OPTIMAL and MULTIVARIABLE CONTROLSDocument52 pagesLec13 - OPTIMAL and MULTIVARIABLE CONTROLSmalik fayzNo ratings yet
- Week 12Document15 pagesWeek 12onuraktas1923No ratings yet
- Lab - 06 56Document23 pagesLab - 06 56MEEN201101056 KFUEITNo ratings yet
- Presentation On Laplace and Inverse Transform, TF and TD ModelingDocument20 pagesPresentation On Laplace and Inverse Transform, TF and TD ModelingHassan RazaNo ratings yet
- Week 7A - Online Classes - S2020Document16 pagesWeek 7A - Online Classes - S2020Muhammad Tayyab YousafzaiNo ratings yet
- 2-1 State SpaceDocument29 pages2-1 State SpaceAnonymous tmtyiZANo ratings yet
- Reactive Power and Voltage Stabilization: David F. TaggartDocument32 pagesReactive Power and Voltage Stabilization: David F. TaggartSal ExcelNo ratings yet
- Application of Particle Swarm Optimization For Economic Load Dispatch and Loss ReductionDocument5 pagesApplication of Particle Swarm Optimization For Economic Load Dispatch and Loss ReductionSal ExcelNo ratings yet
- Power System ContingenciesDocument31 pagesPower System ContingenciesSal ExcelNo ratings yet
- Ee Gate'13Document16 pagesEe Gate'13menilanjan89nLNo ratings yet
- HVDC Padiyar Sample CpyDocument15 pagesHVDC Padiyar Sample CpySal Excel60% (5)
- Revised M Tech r13 RegulationsDocument9 pagesRevised M Tech r13 RegulationsSal ExcelNo ratings yet
- High Voltage Engg r13 Mtech PDFDocument24 pagesHigh Voltage Engg r13 Mtech PDFSal ExcelNo ratings yet
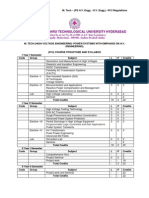
- Control Systems r13 MtechDocument24 pagesControl Systems r13 MtechSal ExcelNo ratings yet
- Effectiveness of Second Language InstructionDocument112 pagesEffectiveness of Second Language InstructionsaeednourzadehNo ratings yet
- 1 - Seeking SpiritualtiyDocument6 pages1 - Seeking SpiritualtiylaslalaslaNo ratings yet
- Xpressions of IntentionDocument15 pagesXpressions of IntentionBagas DeswanggandaraNo ratings yet
- Job Roles Freelance WorkDocument3 pagesJob Roles Freelance Workapi-631652356No ratings yet
- Why Study LanguageDocument3 pagesWhy Study LanguageAngela Scaffidi FontiNo ratings yet
- Skill Understanding Prefixes: Sample TOEIC Test QuestionDocument4 pagesSkill Understanding Prefixes: Sample TOEIC Test Questionwolan hariyantoNo ratings yet
- "José Gálvez": Actividad/Sesión de AprendizajeDocument6 pages"José Gálvez": Actividad/Sesión de AprendizajeBrighite Jhaqueline Rondo BacaNo ratings yet
- Sow Form 3 2017Document6 pagesSow Form 3 2017Jannah OthmanNo ratings yet
- Monday Tuesday Wednesday Thursday Friday: GRADES 1 To 12 Daily Lesson LogDocument12 pagesMonday Tuesday Wednesday Thursday Friday: GRADES 1 To 12 Daily Lesson LogSherwin PhillipNo ratings yet
- Meinwald On BostockDocument4 pagesMeinwald On BostockGabriele CornelliNo ratings yet
- Physical Education PDFDocument10 pagesPhysical Education PDFdimfaNo ratings yet
- Brett Steenbarger Overcoming Market PanicDocument3 pagesBrett Steenbarger Overcoming Market Panicmansam1100% (3)
- The Power of NLP - Attract More Wealth, Better Health, and Improve RelationshipsDocument42 pagesThe Power of NLP - Attract More Wealth, Better Health, and Improve RelationshipsTen ApolinarioNo ratings yet
- Chapter Nine Causal - Comparative ResearcherDocument14 pagesChapter Nine Causal - Comparative ResearcherFelicia LockheartNo ratings yet
- Margaret Jean WatsonDocument3 pagesMargaret Jean WatsonApril Mae Agomo-oNo ratings yet
- The Quantum Resonance Revised: An Unfinished Theory of LifeDocument14 pagesThe Quantum Resonance Revised: An Unfinished Theory of LifeMatt C. KeenerNo ratings yet
- Oral & Language FluencyDocument27 pagesOral & Language FluencyMonica MarticioNo ratings yet
- Argumentative Essay FinalDocument6 pagesArgumentative Essay FinalBeatriz ListaNo ratings yet
- Mechanisms of Dimensionality Reduction and Decorrelation in Deep Neural NetworksDocument9 pagesMechanisms of Dimensionality Reduction and Decorrelation in Deep Neural NetworksVaughn JohnsonNo ratings yet
- Module 1Document54 pagesModule 1Estrelita Pajo RefuerzoNo ratings yet
- VocabDocument8 pagesVocabpaulverhaeghen6877100% (2)
- Language Curriculum Design 1Document3 pagesLanguage Curriculum Design 1Lee Hyeon SooNo ratings yet
- List Five Different Situations Which May Crop Up During A Training SessionDocument6 pagesList Five Different Situations Which May Crop Up During A Training SessionSukhveer VermaNo ratings yet
- Integral Education OriginalDocument16 pagesIntegral Education OriginaltunturucommunityNo ratings yet
- Time. TextDocument3 pagesTime. TextYawen XiaoNo ratings yet
- Leaderrship StylesDocument117 pagesLeaderrship StylesNidheesh KNo ratings yet
- WEEKLY HOME LEARNING PLAN SampleDocument7 pagesWEEKLY HOME LEARNING PLAN SampleprecillaugartehalagoNo ratings yet
- Siddhi - Saraf - Resume - 02 12 2022 19 13 57Document2 pagesSiddhi - Saraf - Resume - 02 12 2022 19 13 57akash bhagatNo ratings yet
- Customer-Centric Companies Are 60% More Profitable!Document1 pageCustomer-Centric Companies Are 60% More Profitable!Pham Van ThanhNo ratings yet
- The Persuasion Knowledge Model How People Cope With Persuasion AttemptsDocument32 pagesThe Persuasion Knowledge Model How People Cope With Persuasion Attemptssk aravindNo ratings yet