You might also like
- Amc8 2001 PDFDocument1 pageAmc8 2001 PDFKevin LeeNo ratings yet
- White House Easter Egg Roll 2007Document8 pagesWhite House Easter Egg Roll 2007losangeles100% (2)
- MATLAB Command Window: 'Ga68 - Scatter Corrected - 12i - 163.dcm'Document8 pagesMATLAB Command Window: 'Ga68 - Scatter Corrected - 12i - 163.dcm'Abyan JadidanNo ratings yet
- Medical image processing in MATLABDocument17 pagesMedical image processing in MATLABAbyan JadidanNo ratings yet
- César Pérez López Auth. MATLAB Differential and Integral Calculus Apress 2014 PDFDocument220 pagesCésar Pérez López Auth. MATLAB Differential and Integral Calculus Apress 2014 PDFvictor farez100% (1)
- MATLAB Pattern Recognition GuideDocument58 pagesMATLAB Pattern Recognition GuidemiusayNo ratings yet
- MATLAB Differential and Integral CalculusDocument220 pagesMATLAB Differential and Integral CalculusjohnbohnNo ratings yet
- Assignment ReportDocument35 pagesAssignment ReportTuong Nguyen Minh NhatNo ratings yet
- Data Analysis Exam HelpDocument8 pagesData Analysis Exam HelpStatistics Exam HelpNo ratings yet
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"From EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Rating: 2.5 out of 5 stars2.5/5 (2)
- MATLAB Problems for Chem EngineeringDocument12 pagesMATLAB Problems for Chem Engineeringxman4243No ratings yet
- Assignment 4RMDocument4 pagesAssignment 4RMDhanya S ReddyNo ratings yet
- Homework Assignment 3 Homework Assignment 3Document10 pagesHomework Assignment 3 Homework Assignment 3Ido AkovNo ratings yet
- Linear Regression with Gradient DescentDocument43 pagesLinear Regression with Gradient DescentTev WallaceNo ratings yet
- Basic Plotting:: X (1 2 3 4 5 6) y (3 - 1 2 4 5 1) Plot (X, Y)Document5 pagesBasic Plotting:: X (1 2 3 4 5 6) y (3 - 1 2 4 5 1) Plot (X, Y)abdul wakeelNo ratings yet
- Session Set Working Directory Choose DirectlryDocument17 pagesSession Set Working Directory Choose DirectlryAnimesh DubeyNo ratings yet
- Operating System TutorialDocument3 pagesOperating System TutorialJunaid AhmedNo ratings yet
- P05 The Regression Pipeline - Training and Testing AnsDocument13 pagesP05 The Regression Pipeline - Training and Testing AnsYONG LONG KHAWNo ratings yet
- Solution First Point ML-HW4Document6 pagesSolution First Point ML-HW4Juan Sebastian Otálora Montenegro100% (1)
- Mws Nle Sim SecconDocument11 pagesMws Nle Sim SecconAlthara BaldagoNo ratings yet
- Tutorial NNDocument20 pagesTutorial NN黄琦妮No ratings yet
- Matrix and Plot Functions TutorialDocument4 pagesMatrix and Plot Functions TutorialAjitYadavNo ratings yet
- Matlab Code 3Document29 pagesMatlab Code 3kthshlxyzNo ratings yet
- Polynomial Regression From Scratch in Python - by Rashida Nasrin Sucky - Towards Data ScienceDocument1 pagePolynomial Regression From Scratch in Python - by Rashida Nasrin Sucky - Towards Data Sciencesiper34606No ratings yet
- AssignmentsDocument84 pagesAssignmentsPrachi TannaNo ratings yet
- Data Analysis Assignment HelpDocument8 pagesData Analysis Assignment HelpStatistics Homework SolverNo ratings yet
- Cga Till Lab 9Document29 pagesCga Till Lab 9saloniaggarwal0304No ratings yet
- Matlab Short TutorialDocument45 pagesMatlab Short TutorialCan ÇamlıkNo ratings yet
- MATLAB Examples for Interpolation and Curve FittingDocument25 pagesMATLAB Examples for Interpolation and Curve FittingQuốc SơnNo ratings yet
- EE-232 Signals and Systems Lab ReportDocument16 pagesEE-232 Signals and Systems Lab ReportMuhammad Uzair KhanNo ratings yet
- EN2550 Assignment 05Document6 pagesEN2550 Assignment 05Thanh DatNo ratings yet
- UNIT-2_ArrayDocument21 pagesUNIT-2_ArrayMamata swainNo ratings yet
- RDocument38 pagesRankit_jolly_2No ratings yet
- 7.3 PcaDocument17 pages7.3 PcaMatrix BotNo ratings yet
- 41 Perusse Alexander Aperusse PDFDocument7 pages41 Perusse Alexander Aperusse PDFAnurita MathurNo ratings yet
- Matlab AnswersDocument16 pagesMatlab AnswersChristelle Kaye BisnarNo ratings yet
- Amirhosoenahmadinejad 401108686 HW1Document5 pagesAmirhosoenahmadinejad 401108686 HW1amirhosoenahmadinejad1382No ratings yet
- R Intro 2011Document115 pagesR Intro 2011marijkepauwelsNo ratings yet
- ML Lab ManualDocument37 pagesML Lab Manualapekshapandekar01100% (1)
- Maxbox - Starter67 Machine LearningDocument7 pagesMaxbox - Starter67 Machine LearningMax KleinerNo ratings yet
- Lab 2Document13 pagesLab 2Chris RamosNo ratings yet
- Handwritten Digit RecognitionDocument8 pagesHandwritten Digit RecognitionAfif Akbar IskandarNo ratings yet
- Handwritten Character Recognition with Neural NetworksDocument12 pagesHandwritten Character Recognition with Neural Networksshreyash sononeNo ratings yet
- Statistical ModelingDocument22 pagesStatistical ModelinggugugagaNo ratings yet
- Subsetting Data in RDocument44 pagesSubsetting Data in RGoyobodNo ratings yet
- Achieving Compatible Numeral Handwriting Recognition Rate by A Simple Activation FunctionDocument9 pagesAchieving Compatible Numeral Handwriting Recognition Rate by A Simple Activation FunctionМБежуљNo ratings yet
- MATLAB - AlgebraDocument4 pagesMATLAB - AlgebraMourya ShashankNo ratings yet
- Advanced Statistics With MatlabDocument5 pagesAdvanced Statistics With MatlabRohit Vishal Kumar100% (2)
- C Arrays (1D) - Code Examples and ExercisesDocument7 pagesC Arrays (1D) - Code Examples and ExercisesIrtaza RizviNo ratings yet
- Awini Mustapha-Project1Document8 pagesAwini Mustapha-Project1writersleedNo ratings yet
- task1Document9 pagestask1Dương Vũ MinhNo ratings yet
- Anne Liz Claudia Donnie Bs21110012 Assignment 5Document9 pagesAnne Liz Claudia Donnie Bs21110012 Assignment 5Anne Liz Claudia DonnieNo ratings yet
- Exercise 1.1: Normally distributed random variables and their meansDocument40 pagesExercise 1.1: Normally distributed random variables and their meansCheepinapi Lakshmi Madhava KrishnaNo ratings yet
- R Studio Practicals-1Document29 pagesR Studio Practicals-1rajshukla7748No ratings yet
- Yuqian Hu Lab 06Document9 pagesYuqian Hu Lab 06api-270959481No ratings yet
- Analysis ReportDocument8 pagesAnalysis ReportwritersleedNo ratings yet
- Implementing Machine Learning AlgorithmsDocument43 pagesImplementing Machine Learning AlgorithmsPankaj Singh100% (1)
- ML IPN - Hands-on digit recognitionDocument14 pagesML IPN - Hands-on digit recognitionfuck off we need limitsNo ratings yet
- Multibank Server Flow and Config v1.0 230317Document18 pagesMultibank Server Flow and Config v1.0 230317ricorizaldyNo ratings yet
- Upc Horizon User ManualDocument93 pagesUpc Horizon User Manualdenagany0% (1)
- Agfa Drystar 5300 - Software Paches PDFDocument18 pagesAgfa Drystar 5300 - Software Paches PDFjamesNo ratings yet
- Windows Startup Processes and Scheduled TasksDocument7 pagesWindows Startup Processes and Scheduled TasksbryamNo ratings yet
- Computers For Africa Solutions Company ProfileDocument8 pagesComputers For Africa Solutions Company ProfileMwila KasondeNo ratings yet
- Tutorialsdojo - com-AWS CloudTrail Vs Amazon CloudWatchDocument2 pagesTutorialsdojo - com-AWS CloudTrail Vs Amazon CloudWatchasassaNo ratings yet
- Tcs Bancs Webservice Repository Document - InwarddirectcreditcorrectiontransactionDocument8 pagesTcs Bancs Webservice Repository Document - InwarddirectcreditcorrectiontransactionMuhammad Sheharyar MohsinNo ratings yet
- Db4o 4.5 Tutorial JavaDocument156 pagesDb4o 4.5 Tutorial JavanyellutlaNo ratings yet
- iNTRODUCTION TO BITCOINDocument35 pagesiNTRODUCTION TO BITCOINInnocent ObialorNo ratings yet
- Da Vinci's Machines - ALL EPISODES - DigitaloutDocument1 pageDa Vinci's Machines - ALL EPISODES - Digitaloutari sudrajatNo ratings yet
- Wilmont's Pharmacy Drone Delivery Pilot Project ScopeDocument3 pagesWilmont's Pharmacy Drone Delivery Pilot Project ScopeEliyas BezabehNo ratings yet
- No - Hands-On Assignment Topics Covered StatusDocument2 pagesNo - Hands-On Assignment Topics Covered StatusSHIVANo ratings yet
- Computer Vision AssignmentDocument5 pagesComputer Vision AssignmentMOHIT KUMARNo ratings yet
- 1000 Ways To Pack The Bin PDFDocument50 pages1000 Ways To Pack The Bin PDFafsarNo ratings yet
- Equipment List For Flexi BSCDocument47 pagesEquipment List For Flexi BSCgalal0% (1)
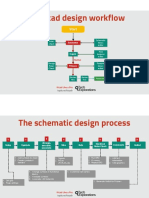
- Kicad Like A Pro 2 IllustrationsDocument5 pagesKicad Like A Pro 2 IllustrationselfrichNo ratings yet
- Automatic Transaxle Control SystemDocument2 pagesAutomatic Transaxle Control SystemMohamed AdelNo ratings yet
- DMOS Microstepping Driver With Translator: Description Features and BenefitsDocument12 pagesDMOS Microstepping Driver With Translator: Description Features and BenefitsAhmad SaeedNo ratings yet
- Fiche Technique MASTERCLAVE VA BAT2Document2 pagesFiche Technique MASTERCLAVE VA BAT2Dũng NguyễnNo ratings yet
- SAP CCTR Advanced Training Configuration Part 1Document146 pagesSAP CCTR Advanced Training Configuration Part 1HuseyinNo ratings yet
- PGDBA 2021 PI ToolkitDocument2 pagesPGDBA 2021 PI Toolkitthecoolguy96No ratings yet
- Infix, Postfix and Prefix EvalutionDocument8 pagesInfix, Postfix and Prefix EvalutionHager MassoudNo ratings yet
- ARM Processor RoadmapDocument23 pagesARM Processor RoadmapKi Ki100% (1)
- Banking Management System - TutorialsDuniyaDocument40 pagesBanking Management System - TutorialsDuniyaMustapha Saidu TatiNo ratings yet
- C7 - Production SchedulingDocument69 pagesC7 - Production SchedulingVo Thi Viet TrinhNo ratings yet
- HyperCrash IntroductionDocument137 pagesHyperCrash IntroductionIndranil BhattacharyyaNo ratings yet
- Icdl It Security QRG - v1.0Document4 pagesIcdl It Security QRG - v1.0AkshitNo ratings yet
- Cel2103 Writing Portfolio Task 3 - 25%Document6 pagesCel2103 Writing Portfolio Task 3 - 25%Muhammad FikriNo ratings yet
- Kdd2019tutorial 190804223750 PDFDocument272 pagesKdd2019tutorial 190804223750 PDFbNo ratings yet
- Epson Error Codes - Quick GuideDocument3 pagesEpson Error Codes - Quick GuideJavier M. Garcia PérezNo ratings yet