You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Introduction to Superstring Theory and its postulated 10-dimensional UniverseDocument31 pagesIntroduction to Superstring Theory and its postulated 10-dimensional UniverseSteveAbonyiNo ratings yet
- Condensed Intro To Tesla Transformers - Eric DollardDocument59 pagesCondensed Intro To Tesla Transformers - Eric Dollard~ScaLaR~100% (4)
- Crest LED Lighting Catalogue 2015Document98 pagesCrest LED Lighting Catalogue 2015SteveAbonyiNo ratings yet
- Terrawatt LaserDocument69 pagesTerrawatt LaserSteveAbonyiNo ratings yet
- Photovoltaic R&D in Germany: First-Class Research Partnerships Ensure A Sustainable EdgeDocument2 pagesPhotovoltaic R&D in Germany: First-Class Research Partnerships Ensure A Sustainable EdgeSteveAbonyiNo ratings yet
- Mobile Water Purifier Provides Safe Drinking Water in EmergenciesDocument4 pagesMobile Water Purifier Provides Safe Drinking Water in EmergenciesSteveAbonyiNo ratings yet
- Cancer Killer EngDocument9 pagesCancer Killer EngSteveAbonyiNo ratings yet
- 2213 ISE PI e World Record Solar CellDocument6 pages2213 ISE PI e World Record Solar CellSteveAbonyiNo ratings yet
- TStipsDocument2 pagesTStipsSteveAbonyiNo ratings yet
- Gtai PV Manufacturers Gtai 150813 TRDocument2 pagesGtai PV Manufacturers Gtai 150813 TRSteveAbonyiNo ratings yet
- Tsin STRDocument2 pagesTsin STRSteveAbonyiNo ratings yet
- Skull 2013Document11 pagesSkull 2013SteveAbonyiNo ratings yet
- LIDAR Lite Data SheetDocument2 pagesLIDAR Lite Data SheetSteveAbonyiNo ratings yet
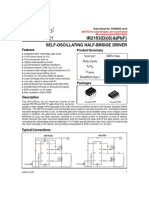
- Ir 2153Document9 pagesIr 2153SteveAbonyiNo ratings yet
- Thermocam WebDocument1 pageThermocam WebSteveAbonyiNo ratings yet
- Teslahighfrequency Coil PDFDocument156 pagesTeslahighfrequency Coil PDFMartin OngNo ratings yet
- LLLT of Eye and BrainDocument19 pagesLLLT of Eye and BrainSteveAbonyiNo ratings yet
- ZMP - 1131232 Osram Led TubeDocument4 pagesZMP - 1131232 Osram Led TubeSteveAbonyiNo ratings yet
- English in 20 Minutes A Day (1-6)Document289 pagesEnglish in 20 Minutes A Day (1-6)Anonymous wVxfrbkz9100% (2)
- LM80 Results CREE LedDocument40 pagesLM80 Results CREE LedSteveAbonyiNo ratings yet
- XKeyscore Slideshow Leaked by The GuardianDocument32 pagesXKeyscore Slideshow Leaked by The GuardianMatthew Keys100% (2)
- Force On An Asymmetric Capacitor (Antigravity Ufo, Army Report Arl-Tr-3005)Document38 pagesForce On An Asymmetric Capacitor (Antigravity Ufo, Army Report Arl-Tr-3005)SteveAbonyiNo ratings yet
- NEC Projector Lt265 ManualDocument145 pagesNEC Projector Lt265 ManualSteveAbonyiNo ratings yet
- Munkafüzet Megoldásai - Nyelvtan - Leckék Szavai 1-6 Stage English - in - 20 - Minutes - A - DayDocument31 pagesMunkafüzet Megoldásai - Nyelvtan - Leckék Szavai 1-6 Stage English - in - 20 - Minutes - A - Daykovaron80No ratings yet
- Quotation StreetlightDocument12 pagesQuotation StreetlightSteveAbonyiNo ratings yet
- Quotation StreetlightDocument12 pagesQuotation StreetlightSteveAbonyiNo ratings yet
- Montauk ProjectDocument8 pagesMontauk ProjectSteveAbonyiNo ratings yet
- Hydrogen Fueled RetrofittingDocument2 pagesHydrogen Fueled RetrofittingSteveAbonyiNo ratings yet
- Upower Analog 2Q08 Calpoly SM FinalDocument36 pagesUpower Analog 2Q08 Calpoly SM FinalSteveAbonyiNo ratings yet