You might also like
- Soil and Foundation DynamicsDocument53 pagesSoil and Foundation DynamicsRaúl ContrerasNo ratings yet
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionFrom EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNo ratings yet
- Critical Excitation Methods in Earthquake EngineeringFrom EverandCritical Excitation Methods in Earthquake EngineeringRating: 4 out of 5 stars4/5 (1)
- Soil-Structure Interaction Analyses of Shallow-Founded Structures On A Potential-Liquefiable Soil Deposit PDFDocument9 pagesSoil-Structure Interaction Analyses of Shallow-Founded Structures On A Potential-Liquefiable Soil Deposit PDFAlly TNo ratings yet
- Gazetas-Mylonakis - 2000 - Seismic Soil Structure InteractionDocument25 pagesGazetas-Mylonakis - 2000 - Seismic Soil Structure InteractionelbinclusolNo ratings yet
- Earthquake Ground Motions at Soft Soil SitesDocument9 pagesEarthquake Ground Motions at Soft Soil SitesJomalyn Tisang100% (1)
- Dynamic Soil Structure Interaction - 01 - Chapter 1 - NaganoDocument42 pagesDynamic Soil Structure Interaction - 01 - Chapter 1 - Naganonevam21100% (1)
- Poulos 1983Document18 pagesPoulos 1983Anonymous v1blzDsEWANo ratings yet
- Edmund-Hambly-1617728.html OBITUARY: Edmund Hambly: Sponsored LinksDocument5 pagesEdmund-Hambly-1617728.html OBITUARY: Edmund Hambly: Sponsored LinksIrfan VadtalaNo ratings yet
- Pais & Kausel 1988, Approx Stiff SDE (Corrected)Document15 pagesPais & Kausel 1988, Approx Stiff SDE (Corrected)Androutsopoulou MariannaNo ratings yet
- Foundations For Dynamic LoadsDocument17 pagesFoundations For Dynamic Loadspilar gilangNo ratings yet
- Soil Dynamics Simplified MethodsDocument23 pagesSoil Dynamics Simplified MethodsSergio CastroNo ratings yet
- 1965 Newmark - Earthquakes On Dams and EmbankmentsDocument21 pages1965 Newmark - Earthquakes On Dams and Embankments26283369100% (1)
- Origin of The Response Spectrum MethodDocument8 pagesOrigin of The Response Spectrum Methodvictorhma29No ratings yet
- A Correlation For Permanent Earthquake-Induced DeformationDocument12 pagesA Correlation For Permanent Earthquake-Induced DeformationhnavastNo ratings yet
- Design Procedure For Bridge Foundations Subject To Liquefaction Induced Lateral SpreadingDocument70 pagesDesign Procedure For Bridge Foundations Subject To Liquefaction Induced Lateral SpreadingNurali MamenNo ratings yet
- OtherDocument33 pagesOthermulham leeNo ratings yet
- Capacity SpectrumDocument27 pagesCapacity Spectrumdenisfr79100% (1)
- Engineering Structures: SciencedirectDocument14 pagesEngineering Structures: SciencedirectMaria AngelNo ratings yet
- Review of 2008 EERI Monograph on Soil Liquefaction Triggering CorrelationsDocument80 pagesReview of 2008 EERI Monograph on Soil Liquefaction Triggering CorrelationsLander07100% (1)
- Evaluation of Slope Performance Under Earthquake Loading ConditionsDocument13 pagesEvaluation of Slope Performance Under Earthquake Loading ConditionsFederico MalteseNo ratings yet
- CE G615 EarthquakeEngineeringDocument4 pagesCE G615 EarthquakeEngineeringvenkat27081995No ratings yet
- ResumeDocument38 pagesResumeRiyaz SiddiqueNo ratings yet
- The Use of Geosynthetics in Road Construction (Case Study - Geotextile)Document48 pagesThe Use of Geosynthetics in Road Construction (Case Study - Geotextile)Suresh DevarajanNo ratings yet
- Displacement Based Seismic Design Chapter 01 (Points)Document14 pagesDisplacement Based Seismic Design Chapter 01 (Points)MuhammadNomanKNo ratings yet
- Brinch Hansen Boletín 28Document21 pagesBrinch Hansen Boletín 28Neri HuamanNo ratings yet
- Sect 7 LinearRespSpec 09-1Document43 pagesSect 7 LinearRespSpec 09-1Surya Teja Bulusu100% (1)
- 26may2014 1Document16 pages26may2014 1Desai NileshNo ratings yet
- Performance-Based Seismic Design PlanDocument176 pagesPerformance-Based Seismic Design Plannick93No ratings yet
- Shear in One-Way Slabs Under Concentrate PDFDocument10 pagesShear in One-Way Slabs Under Concentrate PDFHesham MohamedNo ratings yet
- Effect of Soil - Structure Interaction Constitutive Models On Dynamic Response of Multi - Story Buildings PDFDocument5 pagesEffect of Soil - Structure Interaction Constitutive Models On Dynamic Response of Multi - Story Buildings PDFMirna KristiyantoNo ratings yet
- Seismic Earth Pressures Against Structures With Restrained DisplaDocument9 pagesSeismic Earth Pressures Against Structures With Restrained DisplavttrlcNo ratings yet
- Squat Shear WallDocument227 pagesSquat Shear WallMIKHA2014100% (4)
- Piled-Raft Tc18 Report July 2001Document46 pagesPiled-Raft Tc18 Report July 2001pperic13No ratings yet
- 1978 Damage - To Rock Tunnels From Earthquake ShakingDocument18 pages1978 Damage - To Rock Tunnels From Earthquake Shakingofelix505100% (1)
- EERC79 Soil Structure InteractionDocument61 pagesEERC79 Soil Structure InteractionjersonlopezfajardoNo ratings yet
- Response of Structures To Earthquake Ground MotionsDocument25 pagesResponse of Structures To Earthquake Ground Motionsnsuthar100% (2)
- WebPEER 2015 12 KolozvariDocument143 pagesWebPEER 2015 12 KolozvariRory Cristian Cordero RojoNo ratings yet
- Strength and Stiffness PropertiesDocument36 pagesStrength and Stiffness Propertiesriz2010No ratings yet
- Soil Structure Interaction Effects On Seismic Performance of Multi-Story RC Buildings With and Without Shear WallDocument12 pagesSoil Structure Interaction Effects On Seismic Performance of Multi-Story RC Buildings With and Without Shear WallIJRASETPublicationsNo ratings yet
- (ROBLEE) The Geoindez Model For Practical Design Selection of Nonlinear Soil PropertiesDocument11 pages(ROBLEE) The Geoindez Model For Practical Design Selection of Nonlinear Soil Propertieshal9000_mark1No ratings yet
- Deep FoundationsDocument822 pagesDeep FoundationsAnonymous t7uHD8BvD100% (2)
- Seismic Design of Structures With Viscous DampersDocument15 pagesSeismic Design of Structures With Viscous DampersErland Ramírez SalazarNo ratings yet
- Earthquake EngineeringDocument4 pagesEarthquake EngineeringNicholas ThompsonNo ratings yet
- Seismic Analysis of Structures IIIDocument152 pagesSeismic Analysis of Structures IIINiroj MaharjanNo ratings yet
- Effect of Friction Pendulum Bearing Properties On Behaviour of BuildingsDocument20 pagesEffect of Friction Pendulum Bearing Properties On Behaviour of BuildingsJuan ReyesNo ratings yet
- Performance-Based Design in Earthquake Engineering: A Multidisciplinary ReviewDocument19 pagesPerformance-Based Design in Earthquake Engineering: A Multidisciplinary ReviewBrowinMethownaDavidNo ratings yet
- Computational Geomechanics - Guide to Modeling Soil Properties and BehaviorDocument212 pagesComputational Geomechanics - Guide to Modeling Soil Properties and Behaviorد.م. محمد الطاهرNo ratings yet
- Special Steel Moment FrameDocument41 pagesSpecial Steel Moment FrameClaudio Enrique Nuñez ReyesNo ratings yet
- 2001 - Interaction Surfaces of Reinforced-Concrete Sections in Biaxial BendingDocument7 pages2001 - Interaction Surfaces of Reinforced-Concrete Sections in Biaxial Bendingryan rakhmatNo ratings yet
- Pile Group Stiffness For Seismic Soil-Structure InteractionDocument7 pagesPile Group Stiffness For Seismic Soil-Structure InteractionDani GoodoneNo ratings yet
- EFFECT OF SOIL ON STRUCTURAL RESPONSEDocument18 pagesEFFECT OF SOIL ON STRUCTURAL RESPONSERamesh GantiNo ratings yet
- Lecture Notes For Structural Dynamics - Full PDFDocument323 pagesLecture Notes For Structural Dynamics - Full PDFDavid CivilEngineer100% (2)
- Lateral Load Behavior of Full-Scale Pile Group in ClayDocument11 pagesLateral Load Behavior of Full-Scale Pile Group in ClayJuher ChoudhuryNo ratings yet
- Earthquake Textbook Site GuideDocument2 pagesEarthquake Textbook Site GuideBobby WskNo ratings yet
- Bok:978 1 4020 8733 2 PDFDocument495 pagesBok:978 1 4020 8733 2 PDFJLLIMPE3116No ratings yet
- Inelastic Analysis of StructuresDocument9 pagesInelastic Analysis of StructuresNaim Demiri0% (1)
- Seismic Isolator Design: Property Modification FactorsDocument242 pagesSeismic Isolator Design: Property Modification FactorsTim Van OssNo ratings yet
- Chemo-Mechanical Coupling Behaviour of Leached Concrete-Part1 Experimental ResultsDocument7 pagesChemo-Mechanical Coupling Behaviour of Leached Concrete-Part1 Experimental ResultscasanovavnNo ratings yet
- 1 s2.0 S0143974X12001423 MainDocument13 pages1 s2.0 S0143974X12001423 MaincasanovavnNo ratings yet
- Zero Drift AmplifiersDocument4 pagesZero Drift AmplifierscasanovavnNo ratings yet
- Load Cell PrimerDocument62 pagesLoad Cell PrimerJohn HallowsNo ratings yet
- Evaluation of The Maturity Method To Estimate Concrete Strength in Field ApplicationsDocument332 pagesEvaluation of The Maturity Method To Estimate Concrete Strength in Field ApplicationscasanovavnNo ratings yet
- Aggregates Crucial for Concrete Strength and PropertiesDocument25 pagesAggregates Crucial for Concrete Strength and Propertiesdatagap100% (2)
- Mix DesignDocument29 pagesMix Designshahhassa9No ratings yet
- Dissertation Vinh 2010Document245 pagesDissertation Vinh 2010casanovavnNo ratings yet
- Chap 02Document36 pagesChap 02Shoyeeb AhmedNo ratings yet
- Fly Ash Silica Fume in ConcreteDocument16 pagesFly Ash Silica Fume in ConcreteMax KopNo ratings yet
- Curing ConcreteDocument10 pagesCuring ConcreteShariq KhanNo ratings yet
- Manual On Estimating Soil Properties For Foundation DesignDocument308 pagesManual On Estimating Soil Properties For Foundation DesigncasanovavnNo ratings yet
- Chap 17 HPCDocument16 pagesChap 17 HPCLeen LeeanNo ratings yet
- Admixtures in ConcreteDocument15 pagesAdmixtures in ConcreteSundara LingamNo ratings yet
- Chap 02Document36 pagesChap 02Shoyeeb AhmedNo ratings yet
- A Kraftaufnehmer Ina - Kraftaufnehmer - in - en - LS - KDocument2 pagesA Kraftaufnehmer Ina - Kraftaufnehmer - in - en - LS - KcasanovavnNo ratings yet
- Soil Testing InstrumentsDocument2 pagesSoil Testing InstrumentscasanovavnNo ratings yet
- Dynamic Behaviour of Concrete Sandwich Panel under Blast LoadingDocument8 pagesDynamic Behaviour of Concrete Sandwich Panel under Blast LoadingcasanovavnNo ratings yet
- EOM Pressure Transducer KO 1000Document5 pagesEOM Pressure Transducer KO 1000casanovavnNo ratings yet
- MTS Exceed Universal Test SystemsDocument24 pagesMTS Exceed Universal Test SystemscasanovavnNo ratings yet
- Dredge Material StabilizationDocument22 pagesDredge Material StabilizationcasanovavnNo ratings yet
- Stainless Peeling02 2014Document1 pageStainless Peeling02 2014casanovavnNo ratings yet
- PunditLab ProceqDocument4 pagesPunditLab ProceqcasanovavnNo ratings yet
- Soil Testing InstrumentsDocument2 pagesSoil Testing InstrumentscasanovavnNo ratings yet
- 14 Schlangen Dundee2002Document17 pages14 Schlangen Dundee2002casanovavnNo ratings yet
- Rock Fracture Toughness Fixture (RFT-V100) : DescriptionDocument1 pageRock Fracture Toughness Fixture (RFT-V100) : DescriptioncasanovavnNo ratings yet
- 14 Schlangen Dundee2002Document10 pages14 Schlangen Dundee2002casanovavnNo ratings yet
- Headed Steel Stud Anchors in Composite StructuresDocument15 pagesHeaded Steel Stud Anchors in Composite StructurescasanovavnNo ratings yet
- Halfen HSC Stud Connector: ConcreteDocument6 pagesHalfen HSC Stud Connector: ConcretecasanovavnNo ratings yet
- Chapter 6 Mechanical PropertiesDocument14 pagesChapter 6 Mechanical PropertiescasanovavnNo ratings yet
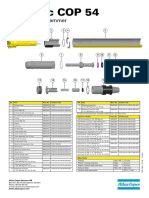
- 9853 1239 01 - COP 54 Service Poster - LOWDocument1 page9853 1239 01 - COP 54 Service Poster - LOWValourdos LukasNo ratings yet
- Flash ADCDocument3 pagesFlash ADCKiran SomayajiNo ratings yet
- Assign4 RANSDocument2 pagesAssign4 RANSankitsaneetNo ratings yet
- Minor Project Report On Efficiency Improvement of A Combined Cycle Power PlantDocument40 pagesMinor Project Report On Efficiency Improvement of A Combined Cycle Power PlantArpit Garg100% (1)
- Stokes' theorem simplifies integration of differential formsDocument6 pagesStokes' theorem simplifies integration of differential formssiriusgrNo ratings yet
- Conventional and Non-Conventional Energy Resources of India: Present and FutureDocument8 pagesConventional and Non-Conventional Energy Resources of India: Present and FutureAnkit SharmaNo ratings yet
- Rockaway Beach Branch Community Impact StudyDocument98 pagesRockaway Beach Branch Community Impact StudyHanaRAlbertsNo ratings yet
- Predicting and understanding rolling contact fatigue in wheels and railsDocument7 pagesPredicting and understanding rolling contact fatigue in wheels and railsmilikanNo ratings yet
- Picador Vegetales HCM450Document20 pagesPicador Vegetales HCM450javier vilchez romeroNo ratings yet
- Establishing OPC UA Connectivity With Rockwell Automation® Integrated ArchitectureDocument3 pagesEstablishing OPC UA Connectivity With Rockwell Automation® Integrated ArchitecturehuiyitNo ratings yet
- AMS Thread Size ChartDocument4 pagesAMS Thread Size Chartarunvelu_1250% (2)
- Nichrome60 Wire Data SheetDocument2 pagesNichrome60 Wire Data SheetvvingtsabtaNo ratings yet
- Linear Slot DiffuserDocument15 pagesLinear Slot DiffuserhyderabadNo ratings yet
- ITU ISUP Release Cause CodesDocument5 pagesITU ISUP Release Cause Codesdelgado08No ratings yet
- Previews AGA XQ9902 PreDocument6 pagesPreviews AGA XQ9902 PreAldrin HernandezNo ratings yet
- Beumer - Pipeconveyor TechnologyDocument51 pagesBeumer - Pipeconveyor TechnologyAli AlatasNo ratings yet
- Structural Systems Engineering GuideDocument67 pagesStructural Systems Engineering Guidejucar fernandezNo ratings yet
- TDS2000 Rig Systems DiagramsDocument13 pagesTDS2000 Rig Systems DiagramsBaskar KannaiahNo ratings yet
- Wireless Mouse m325 Quick Start GuideDocument2 pagesWireless Mouse m325 Quick Start GuideFabolos 9No ratings yet
- Pipeline Tow MethodDocument25 pagesPipeline Tow MethodctrlaltdestroyNo ratings yet
- Civil Engineering Reference BooksDocument2 pagesCivil Engineering Reference Booksdevbrat boseNo ratings yet
- Luran S KR2868C: Acrylonitrile Styrene Acrylate / Polycarbonate (ASA/PC)Document3 pagesLuran S KR2868C: Acrylonitrile Styrene Acrylate / Polycarbonate (ASA/PC)rosebifNo ratings yet
- Usn LM2500 Asme Paper GT2010-22811 61410 JalDocument7 pagesUsn LM2500 Asme Paper GT2010-22811 61410 Jalferrerick0% (1)
- MI MetadataDocument310 pagesMI MetadataMatthew McCreadyNo ratings yet
- Huawei EHuawei - Erelay - Solution - OverviewRelay Solution OverviewDocument31 pagesHuawei EHuawei - Erelay - Solution - OverviewRelay Solution Overviewtariq8283% (6)
- Physics ExamDocument30 pagesPhysics Examjomar bolasocNo ratings yet
- Department of Mechanical Engineering, Uet Lahore Refrigeration and Air Conditioning LaboratoryDocument7 pagesDepartment of Mechanical Engineering, Uet Lahore Refrigeration and Air Conditioning LaboratoryTauQeer ShahNo ratings yet
- Galvanize Galvanize Business Unit: Trust Us To GalvanizeDocument6 pagesGalvanize Galvanize Business Unit: Trust Us To GalvanizeAdet WildanNo ratings yet
- Smart Structural Protective Packaging Design Approach For Handicrafts ProductsDocument12 pagesSmart Structural Protective Packaging Design Approach For Handicrafts ProductsNohaNo ratings yet
- Composite Repair PDFDocument13 pagesComposite Repair PDFNarendra PalandeNo ratings yet