You might also like
- Substation Automation Systems: Design and ImplementationFrom EverandSubstation Automation Systems: Design and ImplementationRating: 4.5 out of 5 stars4.5/5 (3)
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- Logic Solver For Tank Overfill ProtectionDocument1 pageLogic Solver For Tank Overfill ProtectionazrinoordinNo ratings yet
- Logic Solvers For Overpressure Protection: Reliability Block Diagram For The SIF Showing The AC and SC For Each ElementDocument1 pageLogic Solvers For Overpressure Protection: Reliability Block Diagram For The SIF Showing The AC and SC For Each ElementazrinoordinNo ratings yet
- Logic Solvers For Overpressure Protection: Example Failure Data and MethodologyDocument1 pageLogic Solvers For Overpressure Protection: Example Failure Data and MethodologyazrinoordinNo ratings yet
- Logic Solver For Tank Overfill Protection: Example Failure Data and MethodologyDocument1 pageLogic Solver For Tank Overfill Protection: Example Failure Data and MethodologyazrinoordinNo ratings yet
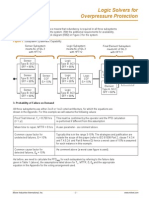
- CT 1706 Logic Solver For Overpressure Protection PDFDocument14 pagesCT 1706 Logic Solver For Overpressure Protection PDFRolandNo ratings yet
- Logic Solver For Tank Overfill ProtectionDocument14 pagesLogic Solver For Tank Overfill ProtectionPdjatmikoNo ratings yet
- Guideline IEC AppendicesDocument46 pagesGuideline IEC AppendicesgiovanniNo ratings yet
- Logic Solver For Tank Overfill Protection: Moore Industries-International, Inc. - 1Document14 pagesLogic Solver For Tank Overfill Protection: Moore Industries-International, Inc. - 1Ghulam MustafaNo ratings yet
- Logic Solvers For Overpressure ProtectionDocument1 pageLogic Solvers For Overpressure ProtectionazrinoordinNo ratings yet
- Logic Solvers For Overpressure Protection: Subsystem Systematic CapabilityDocument1 pageLogic Solvers For Overpressure Protection: Subsystem Systematic CapabilityazrinoordinNo ratings yet
- TLE7242G-TLE8242-2L+-Application-Note KP KI V2 0Document13 pagesTLE7242G-TLE8242-2L+-Application-Note KP KI V2 0Larbi_Lakrout_7056No ratings yet
- 1.1.1 Header Byte Definition of ISO 9141-2Document14 pages1.1.1 Header Byte Definition of ISO 9141-2sir_ajronNo ratings yet
- Hitachi Inverter PID Control Users' GuideDocument16 pagesHitachi Inverter PID Control Users' GuideMirinhaeThiago RosárioNo ratings yet
- White Paper Rouse 2h Sil Verification For Rosemount Type B Transmitters With Type A Components DataDocument16 pagesWhite Paper Rouse 2h Sil Verification For Rosemount Type B Transmitters With Type A Components DataCARLOS PEREZNo ratings yet
- DeltaV SIS With Electronic Marshalling Certificate Rev 1.2 Oct 2 2014Document2 pagesDeltaV SIS With Electronic Marshalling Certificate Rev 1.2 Oct 2 2014Danny PuchaNo ratings yet
- Procidia Control Solutions Coarse/Fine Control: Application DataDocument5 pagesProcidia Control Solutions Coarse/Fine Control: Application DataRodrigo LaucataNo ratings yet
- PFD Calculation MethodDocument6 pagesPFD Calculation Methodirfan22in100% (1)
- 56F8300 and 56F8100 ADC: Application NoteDocument20 pages56F8300 and 56F8100 ADC: Application NoteToacse IoanNo ratings yet
- Table RI-1: Equipment Reliability Information Data DescriptionDocument3 pagesTable RI-1: Equipment Reliability Information Data DescriptionGaneshrudNo ratings yet
- TC24 Temperature Controllers User Manual PDFDocument54 pagesTC24 Temperature Controllers User Manual PDFBreban MariusNo ratings yet
- Table RI-1: Equipment Reliability Information Data DescriptionDocument3 pagesTable RI-1: Equipment Reliability Information Data DescriptionGaneshrudNo ratings yet
- Ansi Iec Relay SymbolsDocument2 pagesAnsi Iec Relay Symbolseastsider908No ratings yet
- Habonim SIL CertificationDocument7 pagesHabonim SIL Certificationjamil vora0% (1)
- Eller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionDocument3 pagesEller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionGaneshrudNo ratings yet
- Sis 2.0Document25 pagesSis 2.0julio cesarNo ratings yet
- Seller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionDocument3 pagesSeller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionganeshrudraNo ratings yet
- IPC-HDBK-001F Final Industry Review Version 2 FINALDocument121 pagesIPC-HDBK-001F Final Industry Review Version 2 FINALRidwan100% (3)
- IRI1Document12 pagesIRI1Varun SharmaNo ratings yet
- 4 30Document6 pages4 30Simon PelletierNo ratings yet
- Ref 601Document22 pagesRef 601adrNo ratings yet
- Automatic Industrial Control LaboratoryDocument21 pagesAutomatic Industrial Control Laboratorytarottaurus54No ratings yet
- Module Descriptor Version: Vc1 Learning Outcome AssessmentsDocument7 pagesModule Descriptor Version: Vc1 Learning Outcome Assessmentsusman akbarNo ratings yet
- High-Tech Range: (Overcurrent, Short-Circuit and Earth Fault Relay)Document12 pagesHigh-Tech Range: (Overcurrent, Short-Circuit and Earth Fault Relay)Vijayaganthaan VisvanatthanNo ratings yet
- PLC AutomationDocument13 pagesPLC AutomationVamsi KumarNo ratings yet
- Eller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionDocument3 pagesEller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionGaneshrudNo ratings yet
- Eller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionDocument3 pagesEller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionGaneshrudNo ratings yet
- Eller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionDocument3 pagesEller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionGaneshrudNo ratings yet
- Eller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionDocument3 pagesEller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionGaneshrudNo ratings yet
- Eller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionDocument3 pagesEller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionGaneshrudNo ratings yet
- Eller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionDocument3 pagesEller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionGaneshrudNo ratings yet
- Eller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionDocument3 pagesEller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionGaneshrudNo ratings yet
- Eller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionDocument3 pagesEller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionGaneshrudNo ratings yet
- Eller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionDocument3 pagesEller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionGaneshrudNo ratings yet
- Eller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionDocument3 pagesEller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionGaneshrudNo ratings yet
- Eller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionDocument3 pagesEller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionGaneshrudNo ratings yet
- Eller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionDocument3 pagesEller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionGaneshrudNo ratings yet
- Eller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionDocument3 pagesEller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionGaneshrudNo ratings yet
- Eller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionDocument3 pagesEller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionGaneshrudNo ratings yet
- Eller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionDocument3 pagesEller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionGaneshrudNo ratings yet
- Eller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionDocument3 pagesEller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionGaneshrudNo ratings yet
- Eller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionDocument3 pagesEller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionGaneshrudNo ratings yet
- Eller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionDocument3 pagesEller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionGaneshrudNo ratings yet
- Eller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionDocument3 pagesEller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionGaneshrudNo ratings yet
- Eller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionDocument3 pagesEller Data Requirement List: Table RI-1: Equipment Reliability Information Data DescriptionGaneshrudNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Advanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesFrom EverandAdvanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesNo ratings yet
- For DOD Internal Use ONLY: AS/NZS 1768:2007 14Document1 pageFor DOD Internal Use ONLY: AS/NZS 1768:2007 14azrinoordinNo ratings yet
- For DOD Internal Use ONLY: AS/NZS 1768:2007 6Document1 pageFor DOD Internal Use ONLY: AS/NZS 1768:2007 6azrinoordinNo ratings yet
- For DOD Internal Use ONLY: 7 AS/NZS 1768:2007Document1 pageFor DOD Internal Use ONLY: 7 AS/NZS 1768:2007azrinoordinNo ratings yet
- For DOD Internal Use ONLY: 3 AS/NZS 1768:2007Document1 pageFor DOD Internal Use ONLY: 3 AS/NZS 1768:2007azrinoordinNo ratings yet
- For DOD Internal Use ONLY: AS/NZS 1768:2007 10Document1 pageFor DOD Internal Use ONLY: AS/NZS 1768:2007 10azrinoordinNo ratings yet
- For DOD Internal Use ONLY: PrefaceDocument1 pageFor DOD Internal Use ONLY: PrefaceazrinoordinNo ratings yet
- TT 10Document1 pageTT 10azrinoordinNo ratings yet
- Lightning Eliminators & Consultants, IncDocument1 pageLightning Eliminators & Consultants, IncazrinoordinNo ratings yet
- For DOD Internal Use ONLY: 9 AS/NZS 1768:2007Document1 pageFor DOD Internal Use ONLY: 9 AS/NZS 1768:2007azrinoordinNo ratings yet
- For DOD Internal Use ONLY: Standards Australia/Standards New Zealand Australian/New Zealand Standard Lightning ProtectionDocument1 pageFor DOD Internal Use ONLY: Standards Australia/Standards New Zealand Australian/New Zealand Standard Lightning ProtectionazrinoordinNo ratings yet
- For DOD Internal Use ONLY: AS/NZS 1768:2007 4Document1 pageFor DOD Internal Use ONLY: AS/NZS 1768:2007 4azrinoordinNo ratings yet
- Australian/New Zealand Standard: For DOD Internal Use ONLYDocument1 pageAustralian/New Zealand Standard: For DOD Internal Use ONLYazrinoordinNo ratings yet
- The "Ins" and "Outs": Input Quality Alarms and Isolators Custom LinearizationDocument1 pageThe "Ins" and "Outs": Input Quality Alarms and Isolators Custom LinearizationazrinoordinNo ratings yet
- Lightning Eliminators & Consultants, Inc.: BackgroundDocument1 pageLightning Eliminators & Consultants, Inc.: BackgroundazrinoordinNo ratings yet
- Lightning Eliminators & Consultants, Inc.: Comparing Conventional and Retractable Bypass ConductorsDocument1 pageLightning Eliminators & Consultants, Inc.: Comparing Conventional and Retractable Bypass ConductorsazrinoordinNo ratings yet
- Lightning Eliminators & Consultants, Inc.: What Does This Mean For FRT'S?Document1 pageLightning Eliminators & Consultants, Inc.: What Does This Mean For FRT'S?azrinoordinNo ratings yet
- Key Lightning Parameters: Lightning Eliminators & Consultants, IncDocument1 pageKey Lightning Parameters: Lightning Eliminators & Consultants, IncazrinoordinNo ratings yet
- Lightning Eliminators & Consultants, IncDocument1 pageLightning Eliminators & Consultants, IncazrinoordinNo ratings yet
- Lightning Eliminators & Consultants, Inc.: Improving Lightning Safety of Petroleum Storage Tanks, October 2009Document1 pageLightning Eliminators & Consultants, Inc.: Improving Lightning Safety of Petroleum Storage Tanks, October 2009azrinoordinNo ratings yet
- Lightning Eliminators & Consultants, Inc.: Improving Lightning Safety of Petroleum Storage Tanks, October 2009Document1 pageLightning Eliminators & Consultants, Inc.: Improving Lightning Safety of Petroleum Storage Tanks, October 2009azrinoordinNo ratings yet
- Lightning Eliminators & Consultants, Inc.: Component C Lasts 500 To 2,000 Times Longer Than The Fast Component ADocument1 pageLightning Eliminators & Consultants, Inc.: Component C Lasts 500 To 2,000 Times Longer Than The Fast Component AazrinoordinNo ratings yet
- Lightning Eliminators & Consultants, Inc.: 3. Roof-Shell Bonding CableDocument1 pageLightning Eliminators & Consultants, Inc.: 3. Roof-Shell Bonding CableazrinoordinNo ratings yet
- Lightning Eliminators & Consultants, Inc.: Three Traditional Methods of Roof-Shell Bonding 1. ShuntsDocument1 pageLightning Eliminators & Consultants, Inc.: Three Traditional Methods of Roof-Shell Bonding 1. ShuntsazrinoordinNo ratings yet
- Beyond The Basics: The "Ins" and "Outs"Document1 pageBeyond The Basics: The "Ins" and "Outs"azrinoordinNo ratings yet
- Lightning Eliminators & Consultants, Inc.: Improving Lightning Safety of Petroleum Storage Tanks, October 2009Document1 pageLightning Eliminators & Consultants, Inc.: Improving Lightning Safety of Petroleum Storage Tanks, October 2009azrinoordinNo ratings yet
- The "Ins" and "Outs" Powering An Isolator/Converter: Signal Isolators, Converters and InterfacesDocument1 pageThe "Ins" and "Outs" Powering An Isolator/Converter: Signal Isolators, Converters and InterfacesazrinoordinNo ratings yet
- The "Ins" and "Outs": VFD Noise: A New ProblemDocument1 pageThe "Ins" and "Outs": VFD Noise: A New ProblemazrinoordinNo ratings yet
- The "Ins" and "Outs": Signal Isolators, Converters and InterfacesDocument1 pageThe "Ins" and "Outs": Signal Isolators, Converters and InterfacesazrinoordinNo ratings yet
- Environmental Considerations: The "Ins" and "Outs"Document1 pageEnvironmental Considerations: The "Ins" and "Outs"azrinoordinNo ratings yet
- The "Ins" and "Outs": Signal Isolators, Converters and InterfacesDocument1 pageThe "Ins" and "Outs": Signal Isolators, Converters and InterfacesazrinoordinNo ratings yet
- Nitro WhitepaperDocument16 pagesNitro WhitepaperhelloNo ratings yet
- My 50 Programs On C++Document53 pagesMy 50 Programs On C++Fahad MughalNo ratings yet
- Course Syllabus: Serial Number: Course Title: Course DescriptionDocument8 pagesCourse Syllabus: Serial Number: Course Title: Course DescriptionJohn Isidro Jacob AnticNo ratings yet
- Technical Seminar: On Cyber SecurityDocument18 pagesTechnical Seminar: On Cyber Securityyasaswi sonyNo ratings yet
- 5453-Article Text-17110-3-10-20220314Document8 pages5453-Article Text-17110-3-10-20220314efidian ariskaNo ratings yet
- Mailam Engineering College Oop-Cs8392 - Unit - IDocument79 pagesMailam Engineering College Oop-Cs8392 - Unit - IVasantha chandrakala RNo ratings yet
- Penetration Tester 1616734798Document1 pagePenetration Tester 1616734798Rafael SenaNo ratings yet
- NBMR AIX QuickStartGuideDocument40 pagesNBMR AIX QuickStartGuideEsteban RestrepoNo ratings yet
- Google Advanced SearchDocument4 pagesGoogle Advanced SearchAINo ratings yet
- 2020 Assignment 2 3760 PDFDocument10 pages2020 Assignment 2 3760 PDFPikuNo ratings yet
- Datex-Ohmeda S5 PDFDocument6 pagesDatex-Ohmeda S5 PDFSERGIO PEREZNo ratings yet
- Manual Scriptcase9 En-Us PDFDocument1,380 pagesManual Scriptcase9 En-Us PDFAlex AskinNo ratings yet
- DP 17 3 SGDocument24 pagesDP 17 3 SGEDWIN ALEXANDER VARGAS JIMENEZNo ratings yet
- A Seminar Report ON Blue BrainDocument20 pagesA Seminar Report ON Blue BrainAngela KaifNo ratings yet
- ECG Monitoring System Using Arduino andDocument4 pagesECG Monitoring System Using Arduino andsalmanNo ratings yet
- Temp Based Fan Speed Control ProjectDocument62 pagesTemp Based Fan Speed Control ProjectKushal Malhotra100% (1)
- Open Text Transactional Content Processing 10.0.1 User GuideDocument247 pagesOpen Text Transactional Content Processing 10.0.1 User GuideAshutosh MishraNo ratings yet
- Torqo 1502 Operators ManualDocument131 pagesTorqo 1502 Operators ManualEliot RodriguezNo ratings yet
- IOS - WikipediaDocument49 pagesIOS - WikipediaMike MikkelsenNo ratings yet
- The Internet of Things (Iot)Document25 pagesThe Internet of Things (Iot)Ankit ThakkarNo ratings yet
- BST106-B60S (L) : Weighing / Force Measuring ControllerDocument39 pagesBST106-B60S (L) : Weighing / Force Measuring Controller29374925morNo ratings yet
- Daily Pip SystemDocument9 pagesDaily Pip SystemGustavo HernandezNo ratings yet
- Automated Election SystemDocument48 pagesAutomated Election Systemfernando100% (1)
- Cambridge Micro ComputersDocument1 pageCambridge Micro ComputersBruno Luiz Leite MartinsNo ratings yet
- MotivationDocument15 pagesMotivationNikhil Thomas AbrahamNo ratings yet
- Full Integration of Matlab Simulink With Control Application Developement Using OPC UADocument6 pagesFull Integration of Matlab Simulink With Control Application Developement Using OPC UABraian Konzgen100% (1)
- Algorithmics Mars Academy NewDocument11 pagesAlgorithmics Mars Academy NewRaghuveeRNo ratings yet
- 1 3Document11 pages1 3factorialNo ratings yet
- Practical-2: Observe Various Connectors, Ports, Front and Back Side of Computer. Write Their Purpose and SpecificationsDocument7 pagesPractical-2: Observe Various Connectors, Ports, Front and Back Side of Computer. Write Their Purpose and SpecificationsAarunain Pandavdra0% (1)
- Tessent Boundaryscan User'S Manual: For Use With Tessent ShellDocument102 pagesTessent Boundaryscan User'S Manual: For Use With Tessent Shellanu0% (1)