Professional Documents
Culture Documents
Cap1 2
Uploaded by
fcantarelliOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Cap1 2
Uploaded by
fcantarelliCopyright:
Available Formats
TRATAMENTO DE PROBLEMAS NO LINEARES NA
MECNICA DOS SLIDOS
EDUARDO BITTENCOURT
PPGEC - UFRGS
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
2
SUMRIO
1. INTRODUO
2. GRANDEZAS CINEMTICAS
2.1. Descrio do Movimento de um corpo
2.2. Gradiente de Deformao
2.3. A Decomposio Polar
2.4. Medidas de Deformao
2.5. Velocidade de Deformao
3. GRANDEZAS ESTTICAS
3.1. Tenso de Cauchy
3.2 Tenso de Kirchhoff
3.3 Tenses Nominais
3.4 Tenses Generalizadas de Hill
4. EQUAES CONSTITUTIVAS EM PEQUENAS DEFORMAES
4.1. Material Elstico
4.2. Material Elasto-plstico
4.3. Material Elasto-visco-plstico
4.4. Material com dano contnuo
5. EQUAES CONSTITUTIVAS EM GRANDES DEFORMAES
5.1. Introduo
5.2. Grandezas Objetivas
5.3. Taxas de tenso objetivas
5.4. Anlise das diferentes definies de taxas de tenso
6. O PROBLEMA DO EQUILBRIO EM PROBLEMAS NO-LINEARES
6.1. O princpio dos trabalhos virtuais
O princpio dos trabalhos virtuais referido a configurao
instantnea do corpo.
O princpio dos trabalhos virtuais referido a configurao inicial
do corpo.
6.2. Aplicao do mtodo dos elementos finitos
Introduo
Formulao Lagrangeana
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
3
Formulao Euleriana
Escolha do elemento finito
Equilbrio nodal
6.3. Soluo do problema no-linear
Mtodo de Newton - Raphson
Mtodo das Diferenas - Centrais
7. INTEGRAO TEMPORAL DA TENSO DE CAUCHY - RELAES
CONSTITUTIVAS HIPO-ELSTICAS
7.1. Integrao em pequenas deformaes
Caso Elasto-plstico
Caso Elasto-visco-plstico
Caso com Dano
7.2. Integrao em grandes deformaes
Introduo
Objetividade Incremental
Mtodo da rotao instantnea final
Outros mtodos incrementalmente ojetivos
8. O PROBLEMA DA INCOMPRESSIBILIDADE
8.1. Efeito do refinamento da malha
8.2 Sub-integrao numrica
Sub-integrao seletiva
Sub-integrao total
9. O PROBLEMA DE CONTATO E ATRITO
ANEXOS
A.1. COORDENADAS CURVILNEAS
A.2. MTODOS MIXTOS
A.2.1 Multiplicadores de Lagrange / Penalidade
A.2.2. Funcional Generalizado de Hu-Washizu
A.3. EFEITO KELVIN-POYTING
A.4. DIAGONALIZAO DE UMA MATRIZ SIMTRICA
A.5. AVALIAO NUMRICA DE GRANDEZAS CINEMTICAS E DA MATRIZ
TANGENTE
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
4
1. INTRODUO
A presente apostila foi elaborada inicialmente para servir de apoio disciplina PEC
00037 - Plasticidade Terica e Computacional I, do curso de ps-graduao em Engenharia
Civil da UFRGS. Os pr-requitos para leitura deste texto so conhecimentos bsicos de
mecnica do contnuo, elasticidade e mtodos dos elementos finitos.
O objetivo maior desta disciplina generalizar os conceitos bsicos de Mecnica do
Contnuo. Por exemplo, o sistema coordenado considerado aqui no mais necessariamente
retangular Cartesiano, as transformaes sofridas pelo corpo no precisam ser
necessariamente pequenas assim como as cargas externas no precisam ser conservativas
nem as tenses serem derivadas de um potencial, etc. Assim, apesar deste curso se destinar
originalmente a alunos que pretendem trabalhar com metais submetidos a grandes
deformaes, qualquer aluno que deseja uma viso mais aprofundada e geral da Mecnica
do Contnuo, encontrar neste texto temas de fundamental importncia. Na medida do
possvel, o texto procurar dar uma interpretao fsica aos tpicos desenvolvidos,
principalmente atravs de exemplos, evitando-se um formalismo matemtico exagerado.
A apostila inicia com a definio de grandezas cinemticas (deformaes) e
grandezas estticas (tenses). A definio destas grandezas no mais nica como usual
em pequenas deformaes. Assim, ser dado nfase ao significado fsico de cada uma das
definies e como ambas se relacionam para formar pares energeticamente consistentes.
Para a correta interpretao destas grandezas ser necessrio introduzir alguns conceitos
bsicos de tensores em coordenadas curvilneas, o que est descrito no Anexo 1.
Posteriormente sero definidas as relaes constitutivas mais comumente
empregadas na Mecnica dos Slidos (elasticidade, plasticidade e visco-plasticidade). At o
momento, apenas relaes hipo-elsticas istropas esto sendo consideradas nesta apostila.
Tambm ser discutido um modelo para introduzir o dano devido a deformao plstica, nas
relaes constitutivas. Inicialmente estas relaes so descritas num contexto de pequenas
deformaes e posteriormente ser visto como generaliz-las em grandes deformaes.
Como trataremos neste texto apenas materiais hipo-elsticos, uma formulao em taxas ser
necessria para as relaes constitutivas. Esta formulao em taxas exigir a definio de
taxas de tenso objetivas em grandes deformaes, tema que ainda gera polmica na
literatura internacional.
Uma vez definidas deformaes, tenses e as relaes entre elas, ser considerado o
problema de como atingir equilbrio em problemas no lineares em geral. Os procedimentos
sero apresentados num contexto do Mtodo dos Elementos Finitos.
Para que se estabelea o equilbrio, ser necessrio calcular foras internas, apartir
das tenses. Para tanto, as taxas de tenso sero integradas no tempo e no espao. Estes
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
5
passos so os mais crticos numa formulao no-linear pois o processo de integrao
temporal deve ser incrementalmente objetivo e a integrao volumtrica deve impedir
anomalias numricas como trancamento da malha e deformaes esprias. No se pretende
esgotar o tema de integrao de tenses nesta apostila pois, com certeza, este um dos
assuntos mais abordados na literatura internacional nos ltimos anos. A apostila pretende
apenas chamar a ateno para a importncia destes passos e propor algumas formas de
tratamento do problema.
Finalmente ser considerado o tratamento de problemas de contato e atrito,
fenmenos pelos quais existe a transmisso de cargas na Mecnica dos Slidos. Ser visto
que o problema de atrito similar ao problema elasto-plstico e os mesmos algoritmos
empregados para a integrao das tenses pode ser empregado para integrao das foras de
atrito.
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
6
2. GRANDEZAS CINEMTICAS
2.1. DESCRIO DO MOVIMENTO DE UM CORPO
A descrio do movimento de um contnuo (no relativstico) pode ser definida
basicamente de duas maneiras:
a) Descrio referencial: As variveis independentes so a posio de uma partcula numa
configurao escolhida como de referncia e o tempo t. (Se a configurao de referncia
escolhida como a inicial, indeformada, temos uma descrio Lagrangeana). A descrio
referencial por vezes tambm chamada de descrio material, pois as variveis
independentes esto relacionadas s partculas materiais.
b) Descrio espacial: As variveis independentes so a posio instantnea de uma
partcula e o tempo t. Fixa a ateno numa dada regio do espao em lugar da posio do
corpo. tambm denominada de descrio Euleriana.
Seja agora, na figura 2.1.1, um meio contnuo que no tempo t = 0 ocupa a regio B.
Depois que ocorre a deformao, num tempo t, os pontos da regio B transformam-se na
regio b. Nesta figura, quatro diferentes sistemas coordenados podem ser identificados:
a) Um sistema coordenado retangular Cartesiano fixo Z
K
(vetores de base unitrios
r
I
K
);
b) Um sistema coordenado retangular Cartesiano mvel z
K
(vetores de base unitrios
r
i
k
),
que acompanha o movimento do corpo;
c) Um sistema coordenado curvelneo fixo X
K
(vetores de base natural ou covariantes
r
G
K
);
d) Um sistema coordenado curvelneo mvel x
k
(vetores de base natural ou covariantes
r
g
k
),
que acompanha o movimento do corpo.
Fig. 2.1.1
X
3
X
1
X
2
x
3
x
1
x
2
b
B
G
1
G
3
G
2
g
1
g
3
g
2
Z
2
Z
3
Z
1
z
1
z
2
z
3
I
3
I
2
I
1
i
3
i
1
i
2
r
P
r
p
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
7
Z
K
e X
K
so denominadas coordenadas de referncia ou Lagrangeanas; z
k
e x
k
so
denominadas coordenadas instantneas ou Eulerianas. Letras maisculas sempre
identificaro coordenadas de referncia e minsculas, as coordenadas instantneas. (Observe
que X
K
e x
k
so componentes contravariantes, conforme definies no Anexo 1)
A relao entre os vetores de base dos sistemas retangulares Cartesianos e os
curvilneos numa mesma configurao, dada pela transformao de coordenadas abaixo
(ver Anexo 1, equao (A.1.26)
1
):
r r
G
Z
X
I
r
s
r
s
(2.1.1)
r
r
g
z
x
i
r
s
r
s
Em geral, na Mecnica do Contnuo, adotado as coordenadas retangulares
Cartesianas como representao de um ponto. Podemos dizer ento que X
K
coincide com Z
K
e que x
k
coincide com z
k
, de modo que temos
r r
r
r
G I
g i
K K
k k
(2.1.2)
Se, ainda, os pontos materiais so identificados relativos a um sistema coordenado
fixo e nico, conforme figura abaixo:
Figura 2.1.2
ento,
r r
I i
K k
(2.1.3)
r
u
r
p
p
x
2
, X
2
r
P
x
3
, X
3
x
1
, X
1
B
b
r
i
3
i
2
i
1
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
8
O movimento do corpo carrega as partculas materiais atravs do espao. Estes
movimentos podem ser expressos atravs das coordenadas de uma partcula,
x
m
= x
k
(X
1
, X
2
, X
3
, t) (2.1.4)
A equao (2.1.4) estabelece uma relao bi-unvoca entre X
K
e x
k
ou cada ponto p
em b vem de um ponto P em B. A unicidade desta relao ser provada mais abaixo.
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
9
2.2. GRADIENTE DE DEFORMAO
Seja um incremento diferencial do vetor-posio dP
r
no corpo indeformado que no
corpo deformado transforma-se para dp
r
, conforme a figura abaixo, ambos medidos num
mesmo sistema coordenado:
dP dX i
m
m
r r
dp dx i
m
m
r
r
Fig. 2.2.1
A relao entre as componentes dos vetores, pode ser obtida atravs da expresso abaixo
(onde (2.1.4) foi empregada):
dx
x X t
X
dX
r
r
r
r
r
( , )
ou dx
x X X X t
X
dX
r
r
m
m
( , , , )
1 2 3
(2.2.1)
onde
r
r
x
X
denominado de gradiente de deformao ou matriz jacobiana. (Uusalmente
identificado pela letra F
~
ou pelo smbolo de gradiente de um campo vetorial
r
w
x ).
F
x
X
ou F
x
X
rm
r
m
~
r
r (2.2.2)
A inversa do gradiente de deformao F
~
1
(ou
r
r
X
x
ou
r w
X
x
) tambm denominado
gradiente de deformao espacial.
O gradiente de deformao avalia como ocorre a transformao na vizinhana de um
ponto. (Apesar do valor do gradiente poder ser finito, a avaliao da transformao
restringe-se apenas a vizinhana do ponto considerado).
dp
r
dP
r
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
10
A inversa F
~
1
nica e existe sempre, de modo que
( )
r r
r
x x X t , inversvel (ou existe
a relao ( )
r r
r
X X x t , ), desde que:
det
~
F 0 (2.2.3)
(O determinante da matriz F
~
s vezes denominado de jacobiano e identificado pela letra
J). A hiptese em (2.2.3) conhecida como o axioma da continuidade e expressa a
indestrutibilidade da matria (um volume finito no pode ser transformado num volume
nulo) e a impenetrabilidade da matria (uma poro da matria no pode penetrar outra)
Prova:
Seja um volume indeformado dV definido pelas componentes cartesianas dX
i
, dY
j
,
dZ
k
, que se transforma num volume dv definido pelas componentes cartesianas dx
i
,
dy
j
, dz
k
. Do clculo vetorial, podemos calcular o volume dv como
dv dx dy dz ( )
r r r
ou:
dv e dx dy dz
ijk
i j k
Da definio (2.2.2) de gradiente de deformao, podemos dizer que:
dv e F F F dX dX dX
ijk im jn kp
m n p
lembrando agora que qualquer determinante de 3
a
ordem pode ser expandido como
e
mnp
(det a
rs
) = e
ijk
a
im
a
jn
a
kp
de modo que a equao acima fica:
dv e F dX dX dX F dV
mnp rs
m n p
rs
(det ) (det )
ou
det
~
F
dv
dV
(2.2.4)
Como o volume sempre uma grandeza positiva, det
~
F sempre positivo e por
consequncia fica provado que F
~
sempre inversvel, sempre que a continuidade da
matria preservada.
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
11
Da equao (2.1.8), observa-se que fisicamente o det
~
F representa a variao de volume da
transformao. No caso de haver conservao de massa, det
~
F representa tambm a
variao na densidade do material, conforme abaixo:
m dV dV
V
F dV
V
V
0
0
0
0 0
det
12 4 3 4
logo, podemos dizer que:
( det
~
) F dV
V
0 0
0
0
Como dV
0
arbitrrio, temos:
det
~
det
~
F ou F
0
0
(2.2.5)
Em materiais incompressveis, onde a transformao ocorre a volume constante,
temos que:
det
~
F 1 (2.2.6)
Nos casos de movimento de corpo rgido, no existe alterao dos comprimentos
dos vetores dX e dx
r
r
, logo:
dx dX
r
r
O quadrado do comprimento de um vetor Euclidiano pode ser calculado como (ver Anexo
1):
dx dx dX dX
i i i i
(2.2.7)
da definio de F
~
, podemos escrever que:
dx dx F F dX dX
i i
ik ij
k j
(2.2.8)
Comparando (2.2.7) e (2.2.8), resulta que:
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
12
F F
F F I
ou
F F
ik ij kj
T
T
~ ~ ~
~ ~
1
(2.2.9)
Logo F
~
uma matriz ortogonal.
Exemplo:
a) Translao: x
i
= X
i
+ S
i
, onde S
i
uma constante. Logo:
F
x
X
ou F I
ij
i
j
ij
~ ~
(2.2.10)
b) Rotao: x
i
= R
ij
X
j
onde R R I
T
~ ~ ~
. Neste caso:
F
ij
= R
ij
(2.2.11)
Em ambos os casos a condio (2.2.9)
3
fica satisfeita.
O gradiente de deformao s vezes qualificado como um tensor bi-ponto. Para
entender esta denominao, voltemos por um instante figura 2.1.1, e imaginemos que alm
das coordenadas curvilneas X
K
e x
k
(configuraes inicial e instantnea, respectivamente),
tenhamos uma transformao de coordenadas definida por
X X X X X
x x x x x
k k
k k
( , , )
( , , )
1 2 3
1 2 3
(2.2.12)
(Observe que enquanto a transformao (2.1.4) descreve uma transformao dependente do
tempo, associando dois pontos no espao, mas a mesma partcula, cada uma das
transformao (2.2.12) representam uma mudana de coordenadas no tempo t, do mesmo
ponto no espao). Assim o gradiente de deformao poderia, pela regra da cadeia, ser
escrito como:
x
X
x
x
x
X
X
X
k
K
k
m
m
M
M
K
ou
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
13
x
X
x
x
X
X
x
X
k
K
k
m
M
K
m
M
_
,
Observe que a primeira transformao entre parntesis refere-se a mudana no ponto em
suas coordenadas espaciais e a segunda transformao refere-se a mudana no ponto em
suas coordenadas materiais. Observe que F
~
ento transforma-se como uma componente
mixta (ver equao (A.1.21)
1
):
F b a F
k
K
m
k
K
M m
M (2.2.13)
Para apenas uma transformao de coordenadas, F
~
transforma-se da mesma forma que um
vetor. Por exemplo, se no h mudana de coordenadas espaciais:
b
m
k
m
k
F a F
k
K
K
M k
M
(Observe que a transformao acima covariante, ver (A.1.11)
1
). Se no h mudana de
coordenadas espaciais:
a
K
M
K
M
F b F
k
K
m
k m
K
(Observe que a transformao acima contravariante, ver (A.1.11)
2
).
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
14
2.3. A DECOMPOSIO POLAR
Toda transformao F
~
pode ser decomposta de forma nica em um tensor ortogonal
que representa uma rotao de corpo rgido ( R
~
) e um tensor simtrico positivo-definido
que representa uma deformao pura ( U ou V
~ ~
) (o que possvel para qualquer tensor
inversvel).
F R U
F V R
~ ~ ~
~ ~ ~
(2.3.1)
onde R R I
T
~ ~ ~
e det
~
R 1. A decomposio acima multiplicativa e deve ser lida da
direita para a esquerda. Assim, de (2.3.1)
1
temos a aplicao de uma deformao seguida
de uma rotao e em (2.3.1)
2
temos a aplicao de uma rotao seguida de uma
deformao. Estas transformaes podem ser visualizadas abaixo:
Fig. 2.3.1
Assim a deformao U
~
aplicada sobre a configurao original do corpo, enquanto
a deformao V
~
aplicada sobre a configurao rotada do mesmo. (Por esta razo o
primeiro considerado uma grandeza Lagrangeana, enquanto o segundo uma grandeza
Euleriana). Para que a F
~
resulte a mesma U
~
e V
~
devem ser tensores distintos:
R
U
V
R
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
15
RU VR
~ ~ ~ ~
Logo,
U R VR
T
~ ~ ~ ~
(2.3.2)
U
~
e V
~
so denominados, respectivamente, tensores de alongamento direito e esquerdo.
Unicidade da decomposio polar:
Pode-se demonstrar que a decomposio polar nica, ou seja, para:
F
~
= R
~
1
U
~
1
= R
~
2
U
~
2
(2.3.3)
podemos demonstrar que
R
~
1
=R
~
2
e U
~
1
=U
~
2
De (2.3.3), podemos escrever que:
R
~
2
=R
~
1
U
~
1
U
~
2
-1
ou, como R ortogonal e U simtrico
R
~
2
-1
=U
~
2
U
~
1
-1
R
~
1
T
= R
~
2
T
=U
~
2
-1
U
~
1
R
~
1
T
de onde podemos escrever que:
U
~
2
U
~
1
-1
= U
~
2
-1
U
~
1
Pr multiplicando ambos os termos acima por U
~
2
e ps multiplicando por U
~
1
, temos
U
~
2
2
= U
~
1
2
ou U
~
2
= U
~
1
(para U
~
i
simtrico, positivo definido)
Da equao (2.3.2), concluimos finalmente que
R
~
1
= R
~
2
ficando demonstrado a unicidade da soluo.
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
16
As transformaes podem ser compostas, conforme indica a figura abaixo.
Fig. 2.3.2
Podemos dizer da figura acima que:
dx F dX
dx F dX
dx F dx F F dX F dX
r
r
r
r
r r
r r
2
1
1
2
2
1
2 1
~
~
~ ~ ~ ~
(2.3.4)
logo:
F F F
~ ~ ~
2 1
(2.3.5)
Portanto temos em grandes deformaes uma decomposio multiplicativa dos
gradientes de deformao. No valem mais, portanto, os princpios de superposio (leis
aditivas) empregados em anlise linear. Observe que a decomposio multiplicativa aplica-se
apenas F
~
( R R R e U U U
~ ~ ~ ~ ~ ~
2 1 2 1
).
Exemplo:
Calcular F
~
no caso de aplicao de uma transformao F
~
1
seguida de uma
transformao F
~
2
conforme abaixo:
F R U
F R U
~ ~ ~
~ ~ ~
1 1 1
2 2 2
onde
F=RU
F
1
=R
1
U
1
F
2
=R
2
U
2
0
1
2
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
17
R R I
e
U
U
~ ~ ~
~
~
1 2
1
2
1 0
0 0
1 0
0 0
1
]
1
1
]
1
logo
F U U
~ ~ ~
2 1
ou
F
~
+ + +
1
]
1
1 0
0 0
(A)
Observe se e so pequenos frente a unidade, o produto entre ambos muito
menor que a unidade e pode ser desprezado. Neste caso, fica restituida a
decomposio aditiva, vlida em pequenas deformaes:
F
~
+ +
1
]
1
1 0
0 0
(B)
Por exemplo, imagine que = = 0.005, o que corresponde a um alongamento de
0.5%, o gradiente de deformao resultante pela equao (B), vlida para pequenas
deformaes, ser de 1.01. A resposta exata (equao (A)), seria 1.010025, ou seja,
um erro muito pequeno em Engenharia. No entanto, se = = 0.2, (20% de
alongamente), a resposta de pequenas deformaes seria 1.4, enquanto a resposta
exata seria 1.44, j um erro significativo. Devemos lembrar que em problemas de
conformao mecnica ou impacto entre estruturas, a deformao atinge nveis de
centenas porcento, inviabilizando totalmente o uso da decomposio aditiva.
Pode-se demostrar tambm que existe uma relao entre os auto-valores e auto-
vetores das matrizes U e V
~ ~
, conforme abaixo:
Como U
~
uma matriz simtrica positivo-definida, pode-se obter, atravs da
decomposio polar, seus valores-prprios e vetores-prprios. O problema de auto-valores
pode ser colocado como:
U
~
r r
(2.3.6)
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
18
onde
r
o auto-vetor associado ao auto-valor . Usando a relao U R V R
T
~ ~ ~ ~
e ainda
pr multiplicando a expresso acima por R
~
, temos:
{ {
R R VR R
ou
V
T
I
~ ~ ~ ~ ~
~
~
123
r
r
r
r
r r
(2.3.7)
Comparando (2.3.6) e (2.3.7)
2
observamos que os auto-valores de U
~
e V
~
so idnticos
enquanto os auto-vetores
r
de V
~
so relacionados aos auto-vetores
r
de U
~
atravs da
matriz de rotao R
~
, conforme abaixo:
r r
R
~
(2.3.8)
Fisicamente
r
representa os eixos principais da configurao de referncia, enquanto
que
r
representa os eixos principais da configurao atual.
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
19
2.4. MEDIDAS DE DEFORMAO
O gradiente de deformao estudado nos itens anteriores pode ser considerado uma
medida de deformao do corpo. Porm, conforme visto, ele incorpora informaes sobre
tanto deformaes como rotaes. Isto torna sua aplicao em relaes constitutivas
complicada uma vez que as mesmas devem ser construdas de modo que no sejam previstas
tenses devido a movimento de corpo rgido. Assim definies de deformao propriamente
ditas sero definidas abaixo. Veremos que diversas definies so possveis quando temos
deformaes finitas. Basicamente duas classes de definies so possveis: definies em
termos da configurao indeformada (ditas deformaes Lagrangeanas) ou em termos da
configurao instantnea (ditas deformaes Eulerianas).
Para caracterizar a deformao, seja na figura 2.2.1 o comprimento ds do segmento
dp
r
, que pode ser calculado como:
{
ds dx dx dx dx dX F FdX
i i
T T T
G
2
r r
r r
~ ~
~
logo
G F F U
T
~ ~ ~
2
(2.4.1)
Podemos observar que a matriz G
~
representa uma medida de deformao uma vez que
relaciona o comprimento do segmento na configurao instantnea (ds) a seu comprimento
na configurao indeformada (dS). G
~
denominado tensor de deformao de Cauchy-
Green direita.
Da mesma forma podemos definir
{
dS dX dX dX dX dx F F dx dx FF
C
dx
i i
T T T T T
B
2 1 1
r r
r r r
12 4 3 4
r
(
~ ~
) (
~ ~
)
~
~
B F F V
T
~ ~ ~ ~
2
(2.4.2)
onde B
~
definido tensor de deformao de Cauchy-Green esquerda (tensor de
Finger). Da relao acima ainda definido:
C B
~ ~
1
(2.4.3)
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
20
onde C
~
um tensor originalmente definido por Cauchy em 1827 (denominado tambm de
tensor de Cauchy).
Observe que todos estes tensores deformao definidos ( U V G Be C
~
,
~
,
~
,
~ ~
) ainda
caracterizam mal a deformao pois no fornecem um valor nulo quando no h deformao
(por exemplo movimento de corpo rgido) fornecendo como resposta a matriz identidade.
Os tensores empregados na prtica so regularizados de maneira a fornecer uma
deformao nula nestas situaes. Estes tensores podem ser agrupados segundo uma famlia
de tensores, denominada de Hill.
Famlia de tensores de Hill:
Estes tensores so genericamente definidos como:
( )
E
m
U I para m
m
~ ~ ~
>
1
0 (2.4.4)
Dependendo da escolha de m, tem-se os diferentes tensores encontrados na prtica.
m = 0 => Deformao Logartmica ou Natural ou de Hencky ( E U
LN
~
ln
~
) (esta
expresso obtida de (2.4.4) aplicando o limite de m 0 atravs da regra de
LHpital).
m = 1 => Deformao de Biot ( E U I
B
~ ~ ~
)
m = 2 => Deformao de Green-Lagrange
( ) ( )
E U I U U I
GL T
~ ~ ~ ~ ~ ~
_
,
1
2
1
2
2
A expresso para Green-Lagrange pode ainda ser reescrita como (ver (2.3.1)
1
).
( )
E F F I
GL T
~ ~ ~ ~
1
2
(2.4.5)
ou, na forma indicial,
( )
E F F
ij
GL
mi mj ij
1
2
o deslocamento de um ponto pode ser definido como:
u x X
i i i
logo,
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
21
F
x
X
X u
X
u
X
mi
m
i
m m
i
mi
m
i
+
+
( )
(2.4.6)
ento,
E
u
X
u
X
ij
GL
mi
m
i
mj
m
j
ij
+
_
,
+
_
,
1
]
1
1
1
2
empregando as caractersticas do operador
ij
, podemos reescrever Green-Lagrange como:
E
u
X
u
X
u
X
u
X
ij
GL
i
j
j
i
m
j
m
i
+ +
1
]
1
1
1
2
(2.4.7)
A equao (2.4.7) a forma mais usual de apresentao do tensor de deformao de Green-
Lagrange, em cursos introdutrios Mecnica do Contnuo.
Abaixo demonstramos fisicamente o significado de Green-Lagrange:
ds dS dx dx dX dX dX F F dX dX dX
dX F F I dX dX E dX
T T T T T
T T T GL
2 2
2
r r
r r r r r r
r r r r
~ ~
(
~ ~ ~
)
~
Portanto o tensor de Green-Lagrange representa a variao do comprimento de um
segmento com relao a seu comprimento inicial.
Comparando com a eq. (2.4.1), podemos ver que o tensor de Green-Lagrange
relaciona-se com Cauchy-Green a direita atravs da relao:
I E G
GL
~ ~ ~
+ 2
Tanto Green-Lagrange como Cauchy-Green a direita so tensores simtricos, de
modo que possuem 3 autovalores (valores principais) reais. Os autovetores (ou
direes principais) das duas matrizes coincidem, uma vez que a soma da matriz
identidade (matriz uniforme), no altera os autovetores do tensor de Green-
Lagrange.
Os tensores vistos acima so tensores Lagrangeanos, uma vez que medem a
deformao a partir da configurao indeformada ( U
~
) do corpo (m>0). Para valores de
m<0, pode-se gerar agora uma famlia de tensores Eulerianos, na qual a deformao
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
22
medida a partir da configurao instantnea do corpo. Para tanto, U
~
substitudo por V
~
em (2.4.4)
( )
E
m
V I para m
m
~ ~ ~
<
1
0 (2.4.8)
Entre os tensores Eulerianos, o de maior importncia o tensor de Almansi, que
obtido substituindo-se m = -2 na equao acima:
( ) ( )
E V I I F F
A
T
~ ~ ~ ~ ~ ~
1
2
1
2
2 1
(2.4.9)
Fisicamente Almansi pode ser definido como a variao do comprimento de um segmento
com relao a seu comprimento final:
ds dS dx dx dX dX dx dx dx F F dx
dx I F F dx dx E dx
T T T T T
T T T A
2 2 1
1
2
r r
r r
r r r r
r r r r
~ ~
(
~ ~ ~
)
~
logo,
E I F F
A
T
~
(
~ ~ ~
)
1
2
1
(2.4.10)
que pode ser escrito, empregando raciocnio similar ao empregado acima na deduo do
tensor de Green-Lagrange, como,
E
u
x
u
x
u
x
u
x
ij
A i
j
j
i
m
j
m
i
+ +
1
]
1
1
1
2
(2.4.11)
Comparando (2.4.10) com (2.4.5), fica evidente que a seguinte relao pode ser
construida entre os tensores de Almansi e Green-Lagrange:
E F E F
A
T GL
~ ~ ~ ~
1
(2.4.12)
Como F
X
x
~
o que corresponde inversa da matriz [A], definida em (A.1.28), se
compararmos (2.3.12) com (A.1.22)
1
, podemos observar que o tensor de Almansi uma
mudana frente covariante do tensor de Green-Lagrange.
Observe que para pequenas deformaes a configurao instantnea confunde-se
com a indeformada (x
i
= X
i
) e os valores de
r
r
u X / so pequenos de modo que a potncia
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
23
destes termos torna-se um infinitsimo de ordem superior. Portanto, em pequenas
deformaes, os tensores de Almansi e de Green-Lagrange confundem-se num nico tensor
deformao conforme abaixo:
ij
i
j
j
i
u
X
u
X
+
1
]
1
1
1
2
(2.4.13)
Este o clssico tensor deformao empregado em pequenas deformaes (tambm
denominado de tensor de Cauchy, embora esta denominao por vezes tambm seja
empregada para o tensor visto na equao (2.4.3)). Portanto, em pequenas deformaes,
perde o sentido a discusso sobre formulao lagrangeana ou euleriana, uma vez que as duas
se confundem. Este tensor tambm no capaz de levar em considerao rotaes rgidas,
como mostra o exemplo abaixo:
Seja um vetor que sofre uma rotao rgida conforme figura abaixo:
A transformao de coordenadas neste caso, dada por:
r
r
v RV
~
onde
r
r
v x i
m
m
r r
V X i
m
m
e
R
~
cos sen
sen cos
1
]
1
como
u x X R X
i i i
ij ij
j
( )
Aplicando a equao (2.4.13), temos,
ij ij ji ij
R R +
1
2
2 ( )
V
v
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
24
ou
ij
1
]
1
cos
cos
1 0
0 1
Portanto, pelo tensor (2.4.13) deformaes - e por conseqncia tenses !! - so
previstas quando temos movimento de corpo rgido
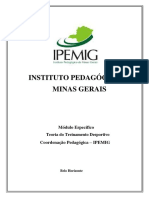
A figura abaixo (2.4.1), mostra as diferenas obtidas empregando as definies de
deformao referidas acima, para o caso uniaxial (barra de comprimento inicial L
0
, e final L).
No captulo 6 sero identificadas medidas de tenso energeticamente associadas a algumas
destas definies de deformao.
-6,00E+00
-5,00E+00
-4,00E+00
-3,00E+00
-2,00E+00
-1,00E+00
0,00E+00
1,00E+00
2,00E+00
3,00E+00
4,00E+00
3
,
0
0
E
-
0
3
2
,
1
3
E
-
0
1
4
,
2
3
E
-
0
1
6
,
3
3
E
-
0
1
8
,
4
3
E
-
0
1
1
,
0
5
E
+
0
0
1
,
2
6
E
+
0
0
1
,
4
7
E
+
0
0
1
,
6
8
E
+
0
0
1
,
8
9
E
+
0
0
2
,
1
0
E
+
0
0
2
,
3
1
E
+
0
0
2
,
5
2
E
+
0
0
2
,
7
3
E
+
0
0
2
,
9
4
E
+
0
0
D
e
f
o
r
m
a
o
Green-Lagrange
Biot
Log
Almansi
Deformao x L/L
0
Fig. (2.4.1)
Algumas observaes interessantes podem ser feitas da figura acima. Primeiramente
para valores de L/L
0
prximos de 1 (pequenas deformaes), todas definies vistas
fornecem valores muito prximos. A nica exceo a definio de Almansi. Pode-se
observar tambm que esta deformao fornece valores de deformao com sinal contrrio s
demais. Isto ocorre devido ao fato de Almansi ter como configurao de referncia a
configurao instantnea, enquanto nas demais a configurao de referncia a
configurao inicial do corpo.
Outra diferena em relao teoria de pequenas deformaes, refere-se ao clculo
da variao de volume. Para tanto, imagine um paraleleppedo orientado na direo dos
eixos principais de deformao, cujos lados sofrem um alongamento, conforme figura
(2.4.2):
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
25
Fig. (2.4.2)
Onde definimos
i
i
i
l
l
. A transformao do corpo pode ser equacionada como:
x
1
= X
1
+ X
1
1
x
2
= X
2
+ X
2
2
x
3
= X
3
+ X
3
3
Portanto, o gradiente de deformao pode ser calculado como,
F
~
+
+
+
1
]
1
1
1
1 0 0
0 1 0
0 0 1
1
2
3
Da equao (2.2.4),
v
V
+ + + + + + + + + + ( )( )( ) 1 1 1 1
1 2 3 1 2 3 1 2 2 3 1 3 1 2 3
(2.4.14)
Se as deformaes so pequenas (
i
pequeno), os produtos acima passam a ser
infinitsimos de ordem superior, de modo que:
v
V
+ + + 1
1 2 3
ou
v
V
I + +
1 2 3
(2.4.15)
x
1
,X
1
x
2
,X
2
x
3
,X
3
l
3
l
2
l
1
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
26
que a conhecida relao que estabelece que a variao de volume dada pelo primeiro
invariante do tensor de deformaes infinitesimais ( I
). Aqui fica claro, porm, que esta
relao vlida unicamente em pequenas deformaes. Se as deformaes no so
pequenas, a relao (2.4.14) deveria ser empregada. Para encontrarmos uma relao geral,
voltemos expresso do gradiente de deformao, que pode ser escrita como funo de U
~
(j que no existe rotao):
F
U
U
U
~
1
]
1
1
1
1
2
3
0 0
0 0
0 0
(2.4.16)
isolando U
~
da equao geral (2.4.4), temos:
F
mE
mE
mE
m
m
m
~
( )
( )
( )
+
+
+
1
]
1
1
1
1
1
1
1
1
2
1
3
1
1 0 0
0 1 0
0 0 1
(2.4.17)
onde E
1
, E
2
e E
3
so as deformaes principais do tensor de deformao generalizada de
Hill. Aplicando (2.2.4),
[ ] [ ]
v
V
mE mE mE mI m II m III m
E E E
m
+ + + + + + ( )( )( )
1 2 3
1
2 3
1
1 1 1 1 (2.4.18)
onde I
E
, II
E
e III
E
so os invariantes do tensor de deformao de Hill. Podemos reescrever a
equao acima na forma geral (2.4.4) como,
[ ]
v
V
mE
VOL
m +1
1
onde E
VOL
a deformao volumtrica, que pode ser escrita como:
E I mII m III
VOL E E E
+ +
2
(2.4.19)
V-se ento que a deformao volumtrica, em grandes deformaes, no mais dada
simplesmente pelo primeiro invariante do tensor deformao. nica exceo refere-se a
deformao logartmica (m=0). Neste caso,
E I U U U
VOL
E
ln
ln
ln ln ln + +
1 2 3
(2.4.20)
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
27
2.5. MEDIDAS DE VELOCIDADE DE DEFORMAO
Quando trabalha-se com teoria da elasticidade, no importa qual o movimento de P
para p (ver figuras (2.1.1) e (2.1.2)), j que as tenses so definidas conhecendo-se
unicamente a configurao inicial e final do corpo. Porm no caso de materiais plsticos ou
fluidos viscosos necessrio conhecermos a histria de deformao. Esta histria de
deformao pode ser estabelecida, desde que se conhea explicitamente o funcional:
r r
r
x x X t ( , ) (2.5.1)
o que obviamente uma tarefa muito difcil.
Para estes tipos de material, dependentes da histria de deformao, ento
necessrio uma formulao em taxas, que permita que o caminho de deformao seja
seguido. Para tanto, vamos definir a velocidade de um ponto como:
r r r
v v x t ( , ) (2.5.2)
Na figura abaixo as linhas pontilhadas descrevem o movimento das partculas P e Q,
cuja equao descrita por (2.5.1). Observe que
r
v definido em termos de coordenadas
Eulerianas
r
x de
r
p . Lempbrando que,
dP dX i
m
m
r r
e
dp dx i
m
m
r
r
ento a velocidade relativa de q em relao a p dada por:
Fig. (2.5.1)
P
Q
p
q
r
v
dv
r
r r
v dv +
dP
r
dp
r
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
28
dv
v
x
dx Ldx
r
r
r
r r
~
(2.5.3)
onde
L
v
x
x
x
~
&
r
r
r
r
(2.5.4)
definido como gradiente espacial de velocidade. Como
&
~
&
F
x
X
r
r
ento
L
x
X
X
x
FF
~
&
&
~~
r
r
r
r
1
(2.5.5)
Desenvolvendo o termo de (2.5.5), pode-se demonstrar que o gradiente de
velocidade composto de uma parte simtrica e outra antissimtrica, de modo que podemos
escrever :
( ) ( )
L L L L L D W
T T
~ ~ ~ ~ ~ ~ ~
+ + +
1
2
1
2
(2.5.6)
onde D
~
o tensor velocidade de deformao ( a parte simtrica de L
~
) e W
~
o tensor
velocidade de rotao ou spin ( a parte antissimtrica de L
~
). Em forma indicial, estas
matrizes podem ser escritas como:
D
x
x
x
x
u
x
u
x
ij
i
j
j
i
i
j
j
i
+
1
]
1
1
+
1
]
1
1
1
2
1
2
&
&
&
&
(2.5.7)
W
x
x
x
x
u
x
u
x
ij
i
j
j
i
i
j
j
i
1
]
1
1
1
]
1
1
1
2
1
2
&
&
&
&
(2.5.8)
Podemos tambm definir a velocidade angular
~
como:
~
&
~ ~
R R
T
(2.5.9)
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
29
Prova:
Seja um vetor unitrio
r
n que rota com o corpo sem se deformar. No instante inicial
da rotao, este tensor identificado por
r
N, de modo que:
r
r
n R N
~
Sua derivada temporal pode ser escrita como:
r
r
r
& &
~
&
~ ~
n R N R R n
T
A grandeza
&
~ ~
R R
T
mede portanto a rotao instantnea de
r
n , livre de todo efeito de
deformao.
Observe que enquanto
~
est livre de todo efeito de deformao, este no o caso de W
~
.
Estes tensores s sero iguais quando a transformao uma rotao pura ( F R
~ ~
).
Para verificarmos melhor a adequao do termo velocidade de deformao para o
tensor D
~
, derivemos no tempo o quadrado do comprimento de dx:
( ) d
dt
ds
d
dt
dx dx dx
d dx
dt
dx Ldx
T T T
( ) ( )
~
2
2 2
r r r
r
r r
Da eq. (2.5.6)
d
dt
ds dx D W dx
T
( ) (
~ ~
)
2
2 +
r r
como a operao
dx Wdx
T
r r
~
0
temos que
d
dt
ds dx Ddx
T
( )
~
2
2
r r
(2.5.10)
o que determina que a taxa de variao do comprimento ds calculado atravs da taxa de
deformao D
~
.
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
30
Se agora derivarmos temporalmente a deformao de Green-Lagrange, multiplicado
o resultado por 2, teremos:
2
&
~
&
~ ~ ~
&
~
E F F F F
GL T
T
+
Empregando (2.5.5) podemos dizer que
&
~ ~ ~
F LF . Substituindo esta expresso na equao
acima
( ) ( )
2 2
&
~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~
E F L F F LF F L L F F D F
GL
T T T T T T
+ +
que pode ser escrito de forma similar (2.4.12):
D F E F
T
GL
~ ~
&
~ ~
1
(2.5.11)
ou seja, podemos observar que o tensor de taxa de deformao uma mudana frente
covariante da taxa do tensor de Green-Lagrange. (Observe que isto no quer dizer que a
velocidade de deformao seja a derivada temporal do tensor deformao de Almansi)
Finalmente importante ressaltar que o tensor taxa de deformao D
~
no a mesma
grandeza que a derivada temporal do tensor de deformao infinitesimal (equao (2.4.13)).
Isto porque ao derivarmos (2.4.13) temporalmente, como X
i
independe do tempo, temos:
.
. .
ij
i
j
j
i
x
X
x
X
+
1
]
1
1
1
2
(2.5.12)
que difere de (2.5.7) onde temos derivada com relao a coordenadas espaciais x
i
. Quando
as deformaes so pequenas, ambas expresses se confundem. Porm, unicamente (2.5.7)
pode ser usada em grandes deformaes.
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
31
2.5. EXERCCIOS
1. Reproduzir os resultados da figura (2.3.1).
2. Seja o quadrado de dimenses dL. Para a transformao homognea geral 2D abaixo,
x
1
= X
1
+ AX
1
+ BX
2
; x
2
= X
2
+ CX
1
+ DX
2
determinar:
a) Os tensores F e E
GL
b) O valor de (ds)
2
e (ds)
2
- (dS)
2
para dX
r
, cujas componentes so (dL, dL, 0).
3. Seja um quadrado ABCD no plano XY (lado AB paralelo ao eixo x), que sofre a seguinte
transformao (cisalhamento simples):
x = X + kY; y = Y; z = Z
k uma constante.
Para este caso:
a) Desenhar a forma da configurao final.
b) Calcular os tensores: F, G, B, C, R, U, L, D, W, E
GL
, E
LN
,
c) Calcular a variao de volume da transformao.
4. Idem item anterior, exceto com a transformao (trao simples):
x = X + kX; y = Y - k Y; z = Z - k Z
k uma constante e o coeficiente de poisson.
5. Idem item anterior, exceto com a transformao (cisalhamento puro):
x = X + kY; y = Y + kX; z = Z
k uma constante.
6. Numa certa regio, o fluxo da matria tem as seguintes componente:
v
x
= -A(x
3
+ xy
2
)e
-kt
; v
y
= A(x
2
y +y
3
)e
-kt
(A e k so constantes; x, y e z so coordenadas espaciais e t o tempo). Definir as matrizes
L, D e W no ponto (1,1,0), no tempo 0. Determinar os valores mximos da taxa de
deformao.
7. O movimento de um certo meio contnuo definido pelas equaes
Tratamento de Problemas No-Lineares na Mecnica dos Slidos
____________________________________________________________________________
32
x
1
= (X
1
+ X
2
)e
t
+ (X
1
- X
2
)e
-t
; x
2
= (X
1
+ X
2
)e
t
- (X
1
- X
2
)e
-t
; x
3
= X
3
a) Expressar a velocidade em termos de coordenadas materiais.
b) Expressar a velocidade em termos de coordenadas espaciais.
c) Calcular a taxa de deformao infinitesimal d dt
ij
/ e comparar com a taxa de
deformao D
ij
nos tempo t=0 e t=0.05.
8. Mostrar que d[ln(ds)]/dt =
r r
n Dn
~
, onde
r r
n dx ds / .
9. Para o exemplo da pgina 23, determinar os tensores de defomao E
LN
, E
B
, E
GL
e E
A
.
10. Demonstrar que o problema de toro pura de um cilindro equivalente ao cisalhamento
simples. (Sugesto: empregar coordenadas cilndricas).
11. Para o caso de flexo pura abaixo.
Neste caso supomos que os lados X
1
= const. tornam-se crculos e X
2
= const. tornam-se
linhas radiais. Para R e tendo a mesma origem do sistema retangular, temos a seguinte
relao:
X
1
= R cos
X
2
= R sen
Determinar F, R, U, E
GL
.
X
1
X
2
R
t
t
0
You might also like
- O Guia Do Orgasmo PDFDocument34 pagesO Guia Do Orgasmo PDFMilton Erasmo Tembe,Jr.100% (4)
- Emoções e sentimentos: identificação e expressãoDocument29 pagesEmoções e sentimentos: identificação e expressãoIsa MagalhãesNo ratings yet
- Decifrando os Segredos dos Testes PsicológicosDocument21 pagesDecifrando os Segredos dos Testes PsicológicosCarolina Llanos75% (4)
- DESAFIO - Resumo Thiago Nigro 2019Document149 pagesDESAFIO - Resumo Thiago Nigro 2019Julio Cesar Feitosa da Hora100% (2)
- Vivendo de Imoveis em PortugalDocument96 pagesVivendo de Imoveis em PortugalJânio BiniNo ratings yet
- Teste de EstanqueidadeDocument7 pagesTeste de EstanqueidadeJerry FariaNo ratings yet
- É possível aumentar seu QI em 8% com treinoDocument7 pagesÉ possível aumentar seu QI em 8% com treinoHélio Furtado AlemãoNo ratings yet
- As 17 leis da equipe eficazDocument39 pagesAs 17 leis da equipe eficazSandro AzevedoNo ratings yet
- Estudo de tempos e métodos: cronometragem e análiseDocument59 pagesEstudo de tempos e métodos: cronometragem e análiseEduardo Yam100% (1)
- GURPS 3th ReligiãoDocument176 pagesGURPS 3th ReligiãoErlon VieiraNo ratings yet
- Cidade e UrbanidadeDocument9 pagesCidade e UrbanidadeBinô ZwetschNo ratings yet
- TCC Cancer e PsicossomaticaDocument112 pagesTCC Cancer e PsicossomaticaJuliana Azevedo100% (1)
- Organização e Gestão da ProduçãoDocument68 pagesOrganização e Gestão da ProduçãoSérgioCoastNo ratings yet
- Mel Robsten - de Repente, AmorDocument890 pagesMel Robsten - de Repente, AmorFernanda Fialho100% (1)
- Constantino - Química Orgânica Vol. - 2Document562 pagesConstantino - Química Orgânica Vol. - 2AliceLopesMacedoNo ratings yet
- Programa de Ecf - Rs - Com FotosDocument6 pagesPrograma de Ecf - Rs - Com FotosfcantarelliNo ratings yet
- DI Difusor Direcional PDFDocument20 pagesDI Difusor Direcional PDFfcantarelliNo ratings yet
- Souza, R.A. - Concreto Estrutural Análise e Dimensionamento de Elementos Com Descontinuidades - Tese de Doutorado, Escola Politécnica Da Universidade de São Paulo, POLI, USP, 2004 PDFDocument20 pagesSouza, R.A. - Concreto Estrutural Análise e Dimensionamento de Elementos Com Descontinuidades - Tese de Doutorado, Escola Politécnica Da Universidade de São Paulo, POLI, USP, 2004 PDFLeah RobinsonNo ratings yet
- SDR-2°Sem 2013-Jun-SetDocument1 pageSDR-2°Sem 2013-Jun-SetfcantarelliNo ratings yet
- Programa de Ecf - Rs - Com FotosDocument6 pagesPrograma de Ecf - Rs - Com FotosfcantarelliNo ratings yet
- A05 - Caracteristicas Geometricas Da Secao TransversalDocument32 pagesA05 - Caracteristicas Geometricas Da Secao TransversalAndré MarquesNo ratings yet
- Modelo e Projeto Escadas Prof MarcelloDocument30 pagesModelo e Projeto Escadas Prof MarcelloWesleyCamposAraujpNo ratings yet
- Estados Limites Serviço Estruturas Concreto ArmadoDocument24 pagesEstados Limites Serviço Estruturas Concreto ArmadoEvandro Paulo FollettoNo ratings yet
- Pilha Documentos PDFDocument1 pagePilha Documentos PDFJord PrimeNo ratings yet
- 2 - PilarDocument30 pages2 - PilarPaulo BarbosaNo ratings yet
- TCCDocument93 pagesTCCfcantarelliNo ratings yet
- Cola - Prova 1Document6 pagesCola - Prova 1fcantarelliNo ratings yet
- Equações de ChuvaDocument6 pagesEquações de ChuvafcantarelliNo ratings yet
- Equações de ChuvaDocument6 pagesEquações de ChuvafcantarelliNo ratings yet
- MACROFLUXODocument10 pagesMACROFLUXOfcantarelliNo ratings yet
- Pilha Documentos PDFDocument1 pagePilha Documentos PDFJord PrimeNo ratings yet
- Proposta Funcionalista de Mudança Lingüística - Ataliba CastilhoDocument32 pagesProposta Funcionalista de Mudança Lingüística - Ataliba CastilhoWilker SilvaNo ratings yet
- Ensino Matemática Ferramentas Século XXIDocument46 pagesEnsino Matemática Ferramentas Século XXIFernando Sousa da PenaNo ratings yet
- Manual Portugal 125UDocument46 pagesManual Portugal 125UAmilcar OliveiraNo ratings yet
- A Virgem Resgatada Pela Fera - J.M. SolloDocument291 pagesA Virgem Resgatada Pela Fera - J.M. Sollokerolyn.f16No ratings yet
- Como as ideias chegam à agenda políticaDocument4 pagesComo as ideias chegam à agenda políticaEduardo Barbabela100% (1)
- Ferramentas de Produção Médias EmpresasDocument249 pagesFerramentas de Produção Médias EmpresasKayo Henrique100% (1)
- Ribeiro Et Al., 2018 (Org) - Olhares - Geograficos - Paisagem - NaturezaDocument178 pagesRibeiro Et Al., 2018 (Org) - Olhares - Geograficos - Paisagem - NaturezaOscar LimaNo ratings yet
- Madis RB5707 PDFDocument10 pagesMadis RB5707 PDFDaniel MachadoNo ratings yet
- ?? Noticias 20220509 @O JornalDocument36 pages?? Noticias 20220509 @O JornalIlelo paulo arturNo ratings yet
- Manual de Aplicacao Radar Inovacao e GlossarioDocument66 pagesManual de Aplicacao Radar Inovacao e GlossarioJannsen Fernandes Justa MchadoNo ratings yet
- Manual de Instalação Do Tetros MIDI V1.01Document22 pagesManual de Instalação Do Tetros MIDI V1.01viniciusNo ratings yet
- Serie Consequences - #2.5 - Behind His Eyes - Truth - Aleatha RomigDocument223 pagesSerie Consequences - #2.5 - Behind His Eyes - Truth - Aleatha RomigJuliano Sampaio ConegundesNo ratings yet
- Matdidatico 78889Document41 pagesMatdidatico 78889Mirian Alves100% (1)
- Ficha de Avaliação de Concessão de Adicional de Insalubridade 1Document9 pagesFicha de Avaliação de Concessão de Adicional de Insalubridade 1Pedro Henrique Custodio BuenoNo ratings yet
- Aula-1b - Definições e Parâmetros - Sistema de Aguas PluviaisDocument16 pagesAula-1b - Definições e Parâmetros - Sistema de Aguas PluviaisOrlando SantosNo ratings yet