You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Proofs of The Pythagorean Theorem PDFDocument38 pagesProofs of The Pythagorean Theorem PDFSilviu BogaNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Lecture Notes On Linear System TheoryDocument158 pagesLecture Notes On Linear System Theorykkd3No ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Journal of Algebraic Hyperstructures and Logical Algebras The investigate of Γ UP-algebrasDocument14 pagesJournal of Algebraic Hyperstructures and Logical Algebras The investigate of Γ UP-algebrasAjit Kumar NairNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Kline Identity 02Document14 pagesKline Identity 02Apollo AdamaNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Pascal's Treatise On The Arithmetical Triangle: Mathematical Induction, Combinations, The Binomial Theorem and Fermat's TheoremDocument14 pagesPascal's Treatise On The Arithmetical Triangle: Mathematical Induction, Combinations, The Binomial Theorem and Fermat's TheoremYEAG92No ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Organization Theory and MethodologyDocument37 pagesOrganization Theory and MethodologyYAYASAN INSAN NUSANTARANo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Top 10 Greatest Mathematicians of All TimeDocument19 pagesTop 10 Greatest Mathematicians of All TimeRyan Christian AbanNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- K1 Postulates For The Integers (Optional)Document15 pagesK1 Postulates For The Integers (Optional)Arief Al IkhsanNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Monkeys and BananasDocument2 pagesMonkeys and BananasJacob RicheyNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- Euler Totient FunctionDocument2 pagesEuler Totient FunctiongyugamNo ratings yet
- Excerpt From Douglas Hofstadter's Gödel, Escher, Bach - Chapter XVIIDocument4 pagesExcerpt From Douglas Hofstadter's Gödel, Escher, Bach - Chapter XVIIJoseph DurrantNo ratings yet
- Automating Gödel's Ontological ProofDocument7 pagesAutomating Gödel's Ontological ProofJoão FerrariNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Bernoulli NumbersDocument10 pagesBernoulli NumbersMichel57No ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- KimberlyDocument6 pagesKimberlyAshutosh SharmaNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- © 2021 by Michael AnshelevichDocument3 pages© 2021 by Michael AnshelevichHarish KumarNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Conway J. B. - Functions of One Complex Variable II (1995) ErrataDocument5 pagesConway J. B. - Functions of One Complex Variable II (1995) Erratamatiashernan123No ratings yet
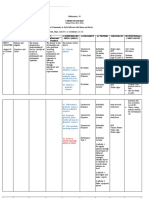
- Curriculum Map Math 10-2022-2023Document13 pagesCurriculum Map Math 10-2022-2023Rodel LaboneteNo ratings yet
- Lesson 3.2 Intuition, Proof and CertaintyDocument57 pagesLesson 3.2 Intuition, Proof and CertaintyBu NanaNo ratings yet
- Propositions and FunctionsDocument17 pagesPropositions and FunctionsRiza Mae BayoNo ratings yet
- Number TheoryDocument6 pagesNumber TheoryNoel HepigaNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Types of ProofDocument4 pagesTypes of ProofDhiyanti War HtpNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Karl Popper - The Logic of Scientific Discovery - PrefaceDocument29 pagesKarl Popper - The Logic of Scientific Discovery - PrefaceRejaneFAraujoNo ratings yet
- Lara Alcock - How To Think About Abstract AlgebraDocument307 pagesLara Alcock - How To Think About Abstract AlgebraGabriel Corrêa100% (8)
- Starting PointDocument69 pagesStarting Pointmaribel anganaNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Geometry Section 3 3Document10 pagesGeometry Section 3 3api-262621710No ratings yet
- Arnold On Teaching MathematicsDocument9 pagesArnold On Teaching MathematicsmehdiukNo ratings yet
- The Greater-Good Defence An Essay On The Rationality of Faith (Melville Y. Stewart (Auth.) )Document213 pagesThe Greater-Good Defence An Essay On The Rationality of Faith (Melville Y. Stewart (Auth.) )TheKarlos1212No ratings yet
- Lec-11 Kleene's TheoremDocument8 pagesLec-11 Kleene's Theoreminstance oneNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Find the type of symmetry for a function where f(t) = f(-tDocument5 pagesFind the type of symmetry for a function where f(t) = f(-tJsbebe jskdbsj0% (1)
- Infinite Sequences of Primes of Form 4n-1 and 4n+1Document2 pagesInfinite Sequences of Primes of Form 4n-1 and 4n+1inventionjournalsNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)