You might also like
- Induction MotorDocument39 pagesInduction MotorAhmed MagdyNo ratings yet
- AC Machine Stator Phases and Induction Motor Rotating Magnetic FieldDocument39 pagesAC Machine Stator Phases and Induction Motor Rotating Magnetic FieldSaneer M SaliNo ratings yet
- ELEC 2032 (3) Electromechanical System: Induction Motor IIIDocument19 pagesELEC 2032 (3) Electromechanical System: Induction Motor IIIAshvin AshNo ratings yet
- ELEC 344 - Module 2 Lecture NotesDocument45 pagesELEC 344 - Module 2 Lecture NotesMax HornerNo ratings yet
- 4Document5 pages4Alsmany ArdabNo ratings yet
- Induction Motor (Asynchronous Motor) : Electrical MachinesDocument41 pagesInduction Motor (Asynchronous Motor) : Electrical MachinesNAITIKNo ratings yet
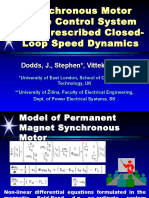
- Synchronous Motor Drive Control System With Prescribed Closed-Loop Speed DynamicsDocument20 pagesSynchronous Motor Drive Control System With Prescribed Closed-Loop Speed DynamicsVijay RajuNo ratings yet
- Induction Machines: Principle of Operation and Equivalent Circuit ModelDocument15 pagesInduction Machines: Principle of Operation and Equivalent Circuit ModelRyan BenjaminNo ratings yet
- Elec 380 Course NotesDocument210 pagesElec 380 Course NotesgranitebricksNo ratings yet
- Induction MachineDocument48 pagesInduction MachinechethanNo ratings yet
- Paper2 Sliding SRMDocument5 pagesPaper2 Sliding SRMjeba_evaNo ratings yet
- Induction Motor Tests-Shan JayamahaDocument8 pagesInduction Motor Tests-Shan Jayamahaදුප්පත් කොල්ලාNo ratings yet
- ECE 8830 - Electric Drives: Topic 11: Slip-Recovery Drives For Wound-Field Induction MotorsDocument42 pagesECE 8830 - Electric Drives: Topic 11: Slip-Recovery Drives For Wound-Field Induction MotorsVikas Roy100% (1)
- MECHDocument36 pagesMECHPalak AriwalaNo ratings yet
- 3-Phase Induction Motor GuideDocument108 pages3-Phase Induction Motor GuideKshitij ShrivastavaNo ratings yet
- Kramer DriveDocument42 pagesKramer DriveSenthil Kumar100% (1)
- Single-Phase External Rotor Synchronous Motor: August 2001Document11 pagesSingle-Phase External Rotor Synchronous Motor: August 2001istoniNo ratings yet
- T Induction MatlabDocument4 pagesT Induction MatlabImran MohmmedNo ratings yet
- Induction MatlabDocument12 pagesInduction Matlabgrido002No ratings yet
- FOC and DTCDocument69 pagesFOC and DTCRaed MohsenNo ratings yet
- Induction Motor Construction and OperationDocument23 pagesInduction Motor Construction and OperationDaniyar SeytenovNo ratings yet
- Performance Analysis of A Single-Phase Ac Voltage Controller Under Induction Motor LoadDocument8 pagesPerformance Analysis of A Single-Phase Ac Voltage Controller Under Induction Motor LoadInternational Journal of Research in Engineering and TechnologyNo ratings yet
- InductionMotors Gate Material PartBDocument38 pagesInductionMotors Gate Material PartBpraveen6494No ratings yet
- CHAPTER 3 Induction Machine PDFDocument32 pagesCHAPTER 3 Induction Machine PDFhailay haderaNo ratings yet
- Basics of A Electric Motor: Dcmotor 1Document47 pagesBasics of A Electric Motor: Dcmotor 1selraj0708No ratings yet
- ED Lab Manual Original - Exp 1 To Exp 5Document19 pagesED Lab Manual Original - Exp 1 To Exp 5Umang MewaraNo ratings yet
- Induction MotorsDocument14 pagesInduction MotorsAbdul RaheemNo ratings yet
- Induction Motor GuideDocument45 pagesInduction Motor GuideRevki 'Exiit'No ratings yet
- Three-Phase Induction MotorDocument10 pagesThree-Phase Induction MotorMadarwi SarwaNo ratings yet
- Induction Motors: The Concept of Rotor SlipDocument12 pagesInduction Motors: The Concept of Rotor Sliphafiz_jaaffarNo ratings yet
- Deternmination IM ParametersDocument26 pagesDeternmination IM ParametersAli AltahirNo ratings yet
- Design of Efficient Induction MotorsDocument43 pagesDesign of Efficient Induction MotorsVivek Pawar83% (6)
- 3 Phase ImDocument43 pages3 Phase Imvibhash kumar dwivediNo ratings yet
- Unit IvDocument24 pagesUnit IvVaibhav SanNo ratings yet
- Synchronous Reluctance Motor - PPSXDocument22 pagesSynchronous Reluctance Motor - PPSXselraj0708No ratings yet
- Exp. 3 - Load Test and Equivalent Circuit Determination On Three Phase Squirrel Cage Induction Motor andDocument9 pagesExp. 3 - Load Test and Equivalent Circuit Determination On Three Phase Squirrel Cage Induction Motor andSanjay MeenaNo ratings yet
- MoappDocument5 pagesMoappluanleNo ratings yet
- M.A.M School of Engineering TRICHY - 621 105Document97 pagesM.A.M School of Engineering TRICHY - 621 105Preethi RanganathanNo ratings yet
- Induction Motor 1Document34 pagesInduction Motor 1hitesh89No ratings yet
- Induction Machines: Steady State Torque Speed CharacteristicDocument9 pagesInduction Machines: Steady State Torque Speed CharacteristicRyan Benjamin100% (1)
- EV Class NotesDocument30 pagesEV Class NotesVinod BabaleshwarNo ratings yet
- DCM SessoinDocument63 pagesDCM SessoinLakshmiNo ratings yet
- Electrical Engineering Lab ManualDocument82 pagesElectrical Engineering Lab ManualManasa Sathyanarayana SNo ratings yet
- Slip Torque Characteristics of Induction MotorDocument22 pagesSlip Torque Characteristics of Induction MotorSree ShobhaNo ratings yet
- Manutec Robor Dynamic SimulationDocument18 pagesManutec Robor Dynamic SimulationlegendsamNo ratings yet
- Three Phase Induction Motor TestsDocument8 pagesThree Phase Induction Motor TestsRavi Teja Hari ShaNkarNo ratings yet
- Formula ShhetDocument10 pagesFormula Shhetandres2chNo ratings yet
- DC MotorDocument38 pagesDC MotorasuypowerNo ratings yet
- High Chopper Frequency Drive of Wound Rotor Induction MotorDocument5 pagesHigh Chopper Frequency Drive of Wound Rotor Induction MotorchandanjuenggNo ratings yet
- Chapter 5: Speed-Torque Characteristics of Electric MotorsDocument46 pagesChapter 5: Speed-Torque Characteristics of Electric MotorsFrozenTuxNo ratings yet
- Induction motor-UNIT-IVDocument23 pagesInduction motor-UNIT-IVVaibhav SanNo ratings yet
- Robotic ArmDocument106 pagesRobotic ArmGourav SinglaNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Week 05 Assignment 05Document1 pageWeek 05 Assignment 05naserhashemniaNo ratings yet
- Massachusetts Institute of Technology Department of Mechanical Engineering 2.010 Modeling, Dynamics, and Control IIIDocument3 pagesMassachusetts Institute of Technology Department of Mechanical Engineering 2.010 Modeling, Dynamics, and Control IIInaserhashemniaNo ratings yet
- Week 01 Assignment 01Document1 pageWeek 01 Assignment 01naserhashemniaNo ratings yet
- Unitary and Hermitian MatricesDocument8 pagesUnitary and Hermitian MatricesJo PopscNo ratings yet
- Lab Week 7 Ee462l DC DC BoostDocument16 pagesLab Week 7 Ee462l DC DC BoostnaserhashemniaNo ratings yet
- Errata 05 30 2008Document11 pagesErrata 05 30 2008naserhashemniaNo ratings yet
- DYprobDocument4 pagesDYprobnaserhashemniaNo ratings yet
- Machine 3-10-1-00Document4 pagesMachine 3-10-1-00naserhashemniaNo ratings yet
- حل مسائل پایان ترم تحلیل 1 ترم 3971Document3 pagesحل مسائل پایان ترم تحلیل 1 ترم 3971naserhashemniaNo ratings yet
- Homework 2 SolutionsDocument2 pagesHomework 2 SolutionsnaserhashemniaNo ratings yet
- Chapter 2. AC Power Flow in Linear Networks PDFDocument25 pagesChapter 2. AC Power Flow in Linear Networks PDFVíctor Hugo Reséndiz EstradaNo ratings yet
- Notes18 TransformersDocument64 pagesNotes18 TransformersnaserhashemniaNo ratings yet
- HW4 SolutionsDocument6 pagesHW4 SolutionsnaserhashemniaNo ratings yet
- Ieee Pes FinalDocument9 pagesIeee Pes FinallanoportoNo ratings yet
- مثال مباحث ویژهDocument4 pagesمثال مباحث ویژهnaserhashemniaNo ratings yet
- Fundamentals of Space-Vector TheoryDocument16 pagesFundamentals of Space-Vector Theoryhn317No ratings yet
- Notes3 LoadmetricsDocument13 pagesNotes3 LoadmetricsnaserhashemniaNo ratings yet
- حل سوالات میان ترم تحلیل 1 ترم 3971Document2 pagesحل سوالات میان ترم تحلیل 1 ترم 3971naserhashemniaNo ratings yet
- ECE320 HW6 SolutionDocument9 pagesECE320 HW6 SolutionnaserhashemniaNo ratings yet
- حل پایان ترم تحلیل 1 ترم 981Document3 pagesحل پایان ترم تحلیل 1 ترم 981naserhashemniaNo ratings yet
- Program ScheduleDocument3 pagesProgram SchedulenaserhashemniaNo ratings yet
- 671Document17 pages671naserhashemnia100% (1)
- Lecture20 2Document77 pagesLecture20 2naserhashemniaNo ratings yet
- Ieee Upcon-2016: List of Registered PapersDocument14 pagesIeee Upcon-2016: List of Registered PapersnaserhashemniaNo ratings yet
- Elk 24 3 19 1312 104Document12 pagesElk 24 3 19 1312 104naserhashemniaNo ratings yet
- ReadmeDocument1 pageReadmenaserhashemniaNo ratings yet
- Single Phase Motors: L1 CA N U1 CBDocument2 pagesSingle Phase Motors: L1 CA N U1 CBnaserhashemniaNo ratings yet
- Technology 900Document23 pagesTechnology 900naserhashemniaNo ratings yet
- Transient ReactanceDocument1 pageTransient Reactancegsantosh06No ratings yet
- Wind Energy Economics 1 (Re Pwut - Blogfa.com)Document30 pagesWind Energy Economics 1 (Re Pwut - Blogfa.com)naserhashemniaNo ratings yet
- American Journal of Sociology Volume 46 Issue 3 1940 (Doi 10.2307/2769572) C. Wright Mills - Methodological Consequences of The Sociology of KnowledgeDocument16 pagesAmerican Journal of Sociology Volume 46 Issue 3 1940 (Doi 10.2307/2769572) C. Wright Mills - Methodological Consequences of The Sociology of KnowledgeBobi BadarevskiNo ratings yet
- Monitor AOC 24P3CW EnglishDocument32 pagesMonitor AOC 24P3CW Englishflorinf_uNo ratings yet
- What Is Canal LiningDocument6 pagesWhat Is Canal LiningFiaz GujjarNo ratings yet
- Session5 Automotive PackagingDocument72 pagesSession5 Automotive PackagingShivprasad Savadatti100% (1)
- Star and Its PropertiesDocument4 pagesStar and Its PropertiesRemond BalabaNo ratings yet
- Innovative Injection Rate Control With Next Generation Common Rail Fuel Injection SystemDocument8 pagesInnovative Injection Rate Control With Next Generation Common Rail Fuel Injection SystemRakesh BiswasNo ratings yet
- CG-SR SL Mechanical Drawing Ver1.40Document28 pagesCG-SR SL Mechanical Drawing Ver1.40Jose Cardoso100% (1)
- Types of Nuclear Reactors GuideDocument19 pagesTypes of Nuclear Reactors GuideUgur GuvenNo ratings yet
- UNAVCO 2008 LiDAR Campaign Processing ReportDocument23 pagesUNAVCO 2008 LiDAR Campaign Processing ReportLina Xiomara SierraNo ratings yet
- Active FilterDocument16 pagesActive FilterRam SankarNo ratings yet
- Jetty Modification - Upd 250417Document86 pagesJetty Modification - Upd 250417Deni Yudha PermanaNo ratings yet
- Section 1Document28 pagesSection 1Sonia KaurNo ratings yet
- Zebralette User GuideDocument24 pagesZebralette User GuideGiacomo TimbrelloNo ratings yet
- GH Chap 78 - Insulin, Glucagon and DMDocument16 pagesGH Chap 78 - Insulin, Glucagon and DMShellz2428No ratings yet
- HP LaserJet 5P - 6P Service Manual (Proper)Document116 pagesHP LaserJet 5P - 6P Service Manual (Proper)maroudasp100% (1)
- Skripsi #2 Tanpa HyperlinkDocument19 pagesSkripsi #2 Tanpa HyperlinkindahNo ratings yet
- Touareg FL Dimensions PDFDocument2 pagesTouareg FL Dimensions PDFZeljko PekicNo ratings yet
- Steel Castings, Welding, Qualifications of Procedures and PersonnelDocument15 pagesSteel Castings, Welding, Qualifications of Procedures and PersonnelRafael CossolinoNo ratings yet
- PSAB Product ManualDocument4 pagesPSAB Product ManualArnold StevenNo ratings yet
- Manual Fx2n 485 BDDocument8 pagesManual Fx2n 485 BDaxo_vfrNo ratings yet
- PD05P XXX XXX B SeDocument2 pagesPD05P XXX XXX B SemaaoeNo ratings yet
- SK EngineeringDocument16 pagesSK EngineeringOmkar waghuleNo ratings yet
- Design of RC Building - ExerciseDocument6 pagesDesign of RC Building - Exercisesajeerala100% (1)
- F-500 Encapsulator TechnologyDocument6 pagesF-500 Encapsulator TechnologyBdSulianoNo ratings yet
- NFRC 200-2010Document45 pagesNFRC 200-2010reynolds534100% (1)
- Solutions: Rise Desnita, M.Si., AptDocument41 pagesSolutions: Rise Desnita, M.Si., Aptdeput_rprNo ratings yet
- S7 314 IFM: Hardware and InstallationDocument87 pagesS7 314 IFM: Hardware and InstallationNitko NetkoNo ratings yet
- PI ControllerDocument5 pagesPI Controllerdanuega1No ratings yet
- DesignScript Summary User ManualDocument20 pagesDesignScript Summary User ManualEsper AshkarNo ratings yet
- NMNR5104 Research MethodologyDocument2 pagesNMNR5104 Research MethodologynadiaNo ratings yet