You might also like
- Bend Tooling IncDocument4 pagesBend Tooling IncSonali SrivastavaNo ratings yet
- Zone Designation Description: 1A First Return Stroke ZoneDocument2 pagesZone Designation Description: 1A First Return Stroke ZoneSonali SrivastavaNo ratings yet
- Statically Determinate - Chapter 2Document43 pagesStatically Determinate - Chapter 2Sonali SrivastavaNo ratings yet
- 3D Functional Tolerancing & Annotation: What's New Getting StartedDocument528 pages3D Functional Tolerancing & Annotation: What's New Getting StartedSonali SrivastavaNo ratings yet
- Aircraft Icing HandbookDocument108 pagesAircraft Icing HandbookThanasis GodosidisNo ratings yet
- Ar0854 PDFDocument240 pagesAr0854 PDFramchanderNo ratings yet
- Lightning Protection AircraftDocument564 pagesLightning Protection AircraftSonali Srivastava100% (1)
- Test Your GD&T Knowledge: Question 1: GD&T Axis Straightness Along With An Orientation or Position ToleranceDocument4 pagesTest Your GD&T Knowledge: Question 1: GD&T Axis Straightness Along With An Orientation or Position ToleranceSonali SrivastavaNo ratings yet
- Frequency Response - Bode PlotsDocument12 pagesFrequency Response - Bode PlotsSonali SrivastavaNo ratings yet
- Number System TGDocument85 pagesNumber System TGSonali SrivastavaNo ratings yet
- Courseplan For Avionics II - FinalDocument7 pagesCourseplan For Avionics II - FinalSonali SrivastavaNo ratings yet
- Introduction To Geometric Dimensioning and TolerancingDocument14 pagesIntroduction To Geometric Dimensioning and Tolerancingtushk20No ratings yet
- InstallDocument222 pagesInstallSonali SrivastavaNo ratings yet
- Basic Autopilot SystemsDocument4 pagesBasic Autopilot SystemsSonali Srivastava100% (1)
- Basic Concept of ThermodynamicsDocument73 pagesBasic Concept of ThermodynamicsLavu Anil ChowdaryNo ratings yet
- AerodynamicsDocument35 pagesAerodynamicsSonali SrivastavaNo ratings yet
- FM BasicDocument49 pagesFM BasicSonali SrivastavaNo ratings yet
- Install ATC Creo Pro 5.0Document21 pagesInstall ATC Creo Pro 5.0Sonali SrivastavaNo ratings yet
- Acp33 3 Flight Airplane EnginesDocument77 pagesAcp33 3 Flight Airplane EnginesAndre GordonNo ratings yet
- Basic AerodynamicsDocument49 pagesBasic AerodynamicsJayDeep KhajureNo ratings yet
- Directional Stability: Students: B.Tech ASE VII Instructor: Dr. Om PrakashDocument9 pagesDirectional Stability: Students: B.Tech ASE VII Instructor: Dr. Om PrakashSonali SrivastavaNo ratings yet
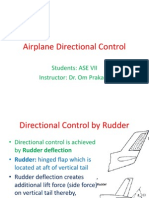
- Airplane Directional Control: Students: ASE VII Instructor: Dr. Om PrakashDocument6 pagesAirplane Directional Control: Students: ASE VII Instructor: Dr. Om PrakashSonali SrivastavaNo ratings yet
- Directional Stability: Students: B.Tech ASE VII Instructor: Dr. Om PrakashDocument9 pagesDirectional Stability: Students: B.Tech ASE VII Instructor: Dr. Om PrakashSonali SrivastavaNo ratings yet
- Aerodynamic BalancingDocument14 pagesAerodynamic BalancingSonali Srivastava50% (2)
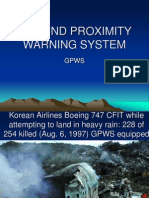
- 19ground Proximity Warning SystemDocument22 pages19ground Proximity Warning SystemSonali Srivastava100% (1)
- Maneuvering StabilityDocument4 pagesManeuvering StabilitySonali SrivastavaNo ratings yet
- Business OrganizationsDocument24 pagesBusiness OrganizationsHemang LimbachiyaNo ratings yet
- NextGen CRM by Sonali UpdatedDocument58 pagesNextGen CRM by Sonali UpdatedSonali SrivastavaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)