You might also like
- R7311006-Process Control InstrumentationDocument4 pagesR7311006-Process Control InstrumentationsivabharathamurthyNo ratings yet
- r7311306 Process ControlDocument4 pagesr7311306 Process ControlsivabharathamurthyNo ratings yet
- rr311004 Process Control InstrumentationDocument8 pagesrr311004 Process Control InstrumentationSRINIVASA RAO GANTANo ratings yet
- r05320803 - Process Dynamics & ControlDocument7 pagesr05320803 - Process Dynamics & ControlSRINIVASA RAO GANTANo ratings yet
- rr311304 Process ControlDocument6 pagesrr311304 Process ControlSRINIVASA RAO GANTANo ratings yet
- Code No: 35110Document8 pagesCode No: 35110SRINIVASA RAO GANTANo ratings yet
- R7311006 Process Control InstrumentationDocument1 pageR7311006 Process Control InstrumentationsivabharathamurthyNo ratings yet
- R7322304 Instrumentation & Bioprocess ControlDocument1 pageR7322304 Instrumentation & Bioprocess ControlsivabharathamurthyNo ratings yet
- Set No. 1Document7 pagesSet No. 1Sony GeorgeNo ratings yet
- Code No: 45108/45108Document6 pagesCode No: 45108/45108SRINIVASA RAO GANTANo ratings yet
- 9A19401 Control SystemsDocument5 pages9A19401 Control SystemssivabharathamurthyNo ratings yet
- Control Systems 6Document8 pagesControl Systems 6paramkusamNo ratings yet
- NR 421002 Telemetry and TelecontrolDocument4 pagesNR 421002 Telemetry and TelecontrolSrinivasa Rao G100% (1)
- Nr-311104 Biological Control SystemsDocument4 pagesNr-311104 Biological Control SystemsSrinivasa Rao GNo ratings yet
- Nr-410204-Power System Operation and ControlDocument8 pagesNr-410204-Power System Operation and ControlSrinivasa Rao GNo ratings yet
- Instrumentation & Control Systems PDFDocument4 pagesInstrumentation & Control Systems PDFPawan YNo ratings yet
- Jntuk 3-1 R13 Q.P May 2018 INSTRUMENTATION & CONTROL SYSTEMS PDFDocument1 pageJntuk 3-1 R13 Q.P May 2018 INSTRUMENTATION & CONTROL SYSTEMS PDFPawan YNo ratings yet
- B.Tech. DEGREE EXAMINATION Questions on Industrial Management and Power SystemsDocument31 pagesB.Tech. DEGREE EXAMINATION Questions on Industrial Management and Power SystemsSiva KumarNo ratings yet
- NR 310301 Basic ElectronicsDocument5 pagesNR 310301 Basic ElectronicsSrinivasa Rao G100% (2)
- MCT 2014Document1 pageMCT 2014Eric CookNo ratings yet
- 9A10701 Automation of Industrial ProcessesDocument4 pages9A10701 Automation of Industrial ProcessessivabharathamurthyNo ratings yet
- Mechatronics - UNIT1-FHDocument23 pagesMechatronics - UNIT1-FHsaba100% (3)
- Adaptive Control Systems Q PDocument4 pagesAdaptive Control Systems Q PSree MurthyNo ratings yet
- Or 421453 Industrial ElectronicsDocument2 pagesOr 421453 Industrial ElectronicsSrinivasa Rao GNo ratings yet
- NR 310202 Electrical MeasurementsDocument8 pagesNR 310202 Electrical MeasurementsSrinivasa Rao G100% (1)
- RR 320803 Process Dynamics & ControlDocument8 pagesRR 320803 Process Dynamics & ControlSRINIVASA RAO GANTANo ratings yet
- Flexible Ac Transmission Systems: Code: EE7T4Document3 pagesFlexible Ac Transmission Systems: Code: EE7T4SumanthNo ratings yet
- NR - 410203 - Computer Methods in Power SystemsDocument6 pagesNR - 410203 - Computer Methods in Power SystemsSrinivasa Rao GNo ratings yet
- Digital Control Systems Exam QuestionsDocument8 pagesDigital Control Systems Exam Questionst chinnaNo ratings yet
- WWW - Manaresults.Co - In: Set No. 1Document4 pagesWWW - Manaresults.Co - In: Set No. 1maheshNo ratings yet
- ME 464 Exam Paper Final-VettedDocument5 pagesME 464 Exam Paper Final-VettedSaad RasheedNo ratings yet
- CCE.MDocument2 pagesCCE.MAsif ChoudharyNo ratings yet
- R07 Set No. 2Document4 pagesR07 Set No. 2Niroshita MadanalaNo ratings yet
- Power System Operation and ControlDocument7 pagesPower System Operation and Controlrv_andeNo ratings yet
- R7410402 Electronic Measurements & InstrumentationDocument4 pagesR7410402 Electronic Measurements & InstrumentationsivabharathamurthyNo ratings yet
- Mechatronics questions bankDocument11 pagesMechatronics questions banksaravananNo ratings yet
- R7410307 MechatronicsDocument4 pagesR7410307 MechatronicssivabharathamurthyNo ratings yet
- WWW - Manaresults.Co - In: Set No. 1Document4 pagesWWW - Manaresults.Co - In: Set No. 1syedinthiyazNo ratings yet
- Mid Internal ICSDocument1 pageMid Internal ICSmanispnNo ratings yet
- Mechatronics (May 2015) Paper 2Document3 pagesMechatronics (May 2015) Paper 2Irfan AliNo ratings yet
- NR 422001 C Automation in ManufactureDocument8 pagesNR 422001 C Automation in ManufactureSrinivasa Rao GNo ratings yet
- NR-221103 - Digital Circuits Design and ApplictionDocument5 pagesNR-221103 - Digital Circuits Design and ApplictionSrinivasa Rao G100% (1)
- MT Modern Control TheoryDocument2 pagesMT Modern Control Theoryhari0118No ratings yet
- BE 2008 Electronics&TelecommunicationDocument71 pagesBE 2008 Electronics&TelecommunicationAdib ShaikhNo ratings yet
- (Rronl' C 'Sevy : : S / - U. An-4444Document2 pages(Rronl' C 'Sevy : : S / - U. An-4444Shah PatelNo ratings yet
- Sensors and Transducers (ICE 2105)Document1 pageSensors and Transducers (ICE 2105)Shantmanu KarnaNo ratings yet
- Improved Direct Torque Control of Induction MotorDocument19 pagesImproved Direct Torque Control of Induction MotorSambitKumarNo ratings yet
- III B. Tech I Semester Regular/Supplementary Examinations, October-2016 Power ElectronicsDocument6 pagesIII B. Tech I Semester Regular/Supplementary Examinations, October-2016 Power ElectronicssixfacerajNo ratings yet
- r05320204 InstrumentationDocument4 pagesr05320204 InstrumentationSRINIVASA RAO GANTANo ratings yet
- Te 2004Document498 pagesTe 2004rahulsaini855No ratings yet
- Nr-210201 Prime Movers and PumpsDocument4 pagesNr-210201 Prime Movers and PumpsSrinivasa Rao GNo ratings yet
- M. Tech II Semester Q.P Oct 2015 Day 1Document5 pagesM. Tech II Semester Q.P Oct 2015 Day 1Prabhath DarlingNo ratings yet
- Merged DocumentDocument25 pagesMerged DocumentAshokAbiNo ratings yet
- 9A10705 Power Plant InstrumentationDocument4 pages9A10705 Power Plant InstrumentationsivabharathamurthyNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsFrom EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsNo ratings yet
- Electrical Circuits with Variable Parameters: Including Pulsed-Control SystemsFrom EverandElectrical Circuits with Variable Parameters: Including Pulsed-Control SystemsNo ratings yet
- Advanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesFrom EverandAdvanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesNo ratings yet
- r05320403 Microwave EngineeringDocument8 pagesr05320403 Microwave EngineeringSrinivasa Rao G100% (2)
- r05320305 Design of Machine Members IIDocument11 pagesr05320305 Design of Machine Members IISrinivasa Rao G100% (4)
- Rr322305 ImmunologyDocument4 pagesRr322305 ImmunologySrinivasa Rao GNo ratings yet
- 42 Mca NR Programming in JavaDocument1 page42 Mca NR Programming in JavaSrinivasa Rao GNo ratings yet
- 43-Mca-Or-Design and Analysis of AlgorithmDocument1 page43-Mca-Or-Design and Analysis of AlgorithmSrinivasa Rao GNo ratings yet
- r5 401 Mba Strategic Management Set1Document1 pager5 401 Mba Strategic Management Set1Srinivasa Rao G100% (3)
- 41 Mca NR Software EngineeringDocument1 page41 Mca NR Software EngineeringSrinivasa Rao G100% (2)
- Switch Gear and ProtectionDocument6 pagesSwitch Gear and Protectionrajaniram100% (1)
- r5 402 Mba Management of Technology Set1Document1 pager5 402 Mba Management of Technology Set1Srinivasa Rao G100% (1)
- 41 Mca or Software EngineeringDocument1 page41 Mca or Software EngineeringSrinivasa Rao G100% (1)
- r5 401 Mba Strategic Management Set1Document1 pager5 401 Mba Strategic Management Set1Srinivasa Rao G100% (3)
- 41 Mca NR Software EngineeringDocument1 page41 Mca NR Software EngineeringSrinivasa Rao G100% (2)
- r6 42 Mca Advanced Java Programming Set1Document1 pager6 42 Mca Advanced Java Programming Set1Srinivasa Rao G100% (1)
- r6 43 Mca Data Warehousing and Mining Set1Document1 pager6 43 Mca Data Warehousing and Mining Set1Srinivasa Rao GNo ratings yet
- 43-Mca-Or-Design and Analysis of AlgorithmDocument1 page43-Mca-Or-Design and Analysis of AlgorithmSrinivasa Rao GNo ratings yet
- r5 305 Mba Retailing Management Set1Document1 pager5 305 Mba Retailing Management Set1Srinivasa Rao GNo ratings yet
- NR 302 Mba Cost and Management Accounting Set1Document1 pageNR 302 Mba Cost and Management Accounting Set1Srinivasa Rao GNo ratings yet
- r6 43 Mca Data Warehousing and Mining Set1Document1 pager6 43 Mca Data Warehousing and Mining Set1Srinivasa Rao GNo ratings yet
- Or 32 Mcacomputer Communication NetworksDocument1 pageOr 32 Mcacomputer Communication NetworksSrinivasa Rao GNo ratings yet
- Or 34 Mca Management Information SystemsDocument1 pageOr 34 Mca Management Information SystemsSrinivasa Rao GNo ratings yet
- r5 304 Mba Enterprise Resource PlanningDocument1 pager5 304 Mba Enterprise Resource PlanningSrinivasa Rao GNo ratings yet
- Nr-35-Mca-Design and Analysis of AlgorithmDocument2 pagesNr-35-Mca-Design and Analysis of AlgorithmSrinivasa Rao G100% (1)
- NR 305 Mba Retailing Management Set1Document1 pageNR 305 Mba Retailing Management Set1Srinivasa Rao GNo ratings yet
- r6 34 Mca Management Information Systems Set1Document1 pager6 34 Mca Management Information Systems Set1Srinivasa Rao G100% (2)
- r6 47 Mca Distributed Operating Systems Set1Document1 pager6 47 Mca Distributed Operating Systems Set1Srinivasa Rao GNo ratings yet
- r6 48 Mca Mobile Computing Set1Document1 pager6 48 Mca Mobile Computing Set1Srinivasa Rao GNo ratings yet
- NR 31 Mca Database Management SystemsDocument1 pageNR 31 Mca Database Management SystemsSrinivasa Rao GNo ratings yet
- r6 33 Mca Unix Networks Programming Set1Document1 pager6 33 Mca Unix Networks Programming Set1Srinivasa Rao GNo ratings yet
- r5 408 Mba Decision Support Systems Set1Document4 pagesr5 408 Mba Decision Support Systems Set1Srinivasa Rao GNo ratings yet
- r5 410 Mba Management of Change Set1Document1 pager5 410 Mba Management of Change Set1Srinivasa Rao GNo ratings yet
- Salting-Out Crystallisation Using NH Ina Laboratory-Scale Gas Lift ReactorDocument10 pagesSalting-Out Crystallisation Using NH Ina Laboratory-Scale Gas Lift ReactorChester LowreyNo ratings yet
- FINA 7A10 - Review of ConceptsDocument2 pagesFINA 7A10 - Review of ConceptsEint PhooNo ratings yet
- Currency Exchnage FormatDocument1 pageCurrency Exchnage FormatSarvjeet SinghNo ratings yet
- L5 Isomerism 3Document16 pagesL5 Isomerism 3Cheng FuNo ratings yet
- Nord Lock Washers Material Type GuideDocument1 pageNord Lock Washers Material Type GuideArthur ZinkeNo ratings yet
- Praveen Verma Auto CAD IntershipDocument15 pagesPraveen Verma Auto CAD IntershipPraveen vermaNo ratings yet
- Grid Infrastructure Installation and Upgrade Guide Ibm Aix Power Systems 64 BitDocument284 pagesGrid Infrastructure Installation and Upgrade Guide Ibm Aix Power Systems 64 BitAntonioNo ratings yet
- Semi Detailed Lesson Format BEEd 1Document2 pagesSemi Detailed Lesson Format BEEd 1Kristine BuenaventuraNo ratings yet
- Chapter 2 (Teacher)Document19 pagesChapter 2 (Teacher)ajakazNo ratings yet
- Lista 30 JulioDocument2 pagesLista 30 JulioMax Bike MartinezNo ratings yet
- RA ELECTRONICSENGR DAVAO Apr2019 PDFDocument6 pagesRA ELECTRONICSENGR DAVAO Apr2019 PDFPhilBoardResultsNo ratings yet
- ChE 4110 Process Control HW 1Document6 pagesChE 4110 Process Control HW 1MalloryNo ratings yet
- Sample COBOL ProgramsDocument35 pagesSample COBOL Programsrahul tejNo ratings yet
- CeramicsDocument39 pagesCeramicsD4-dc1 Kelas100% (1)
- W17155 PDF EngDocument7 pagesW17155 PDF Engluis alfredo lachira coveñasNo ratings yet
- Installation Guide for lemonPOS POS SoftwareDocument4 pagesInstallation Guide for lemonPOS POS SoftwareHenry HubNo ratings yet
- Watson Studio - IBM CloudDocument2 pagesWatson Studio - IBM CloudPurvaNo ratings yet
- The 4Ms of Operations: Prepared By: Karla Jane F. BangaysisoDocument18 pagesThe 4Ms of Operations: Prepared By: Karla Jane F. BangaysisoKarla BangFerNo ratings yet
- Sales TAX FORMATDocument6 pagesSales TAX FORMATMuhammad HamzaNo ratings yet
- Cambridge Ext2 Ch1 Complex Numbers IWEBDocument62 pagesCambridge Ext2 Ch1 Complex Numbers IWEBchenNo ratings yet
- Saturn Engine Compression Test GuideDocument7 pagesSaturn Engine Compression Test GuideManuel IzquierdoNo ratings yet
- Ethical and Social Dimensions of Science and TechnologyDocument26 pagesEthical and Social Dimensions of Science and TechnologyKlester Kim Sauro ZitaNo ratings yet
- Sbi Home Loan InfoDocument4 pagesSbi Home Loan InfoBhargavaSharmaNo ratings yet
- Lecture Notes On Revaluation and Impairment PDFDocument6 pagesLecture Notes On Revaluation and Impairment PDFjudel ArielNo ratings yet
- 1404 Pratul Singhal Ideal Gas Equation Density StoichiometryDocument22 pages1404 Pratul Singhal Ideal Gas Equation Density StoichiometryYang ChoudhuryNo ratings yet
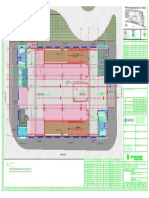
- Key plan and area statement comparison for multi-level car park (MLCPDocument1 pageKey plan and area statement comparison for multi-level car park (MLCP121715502003 BOLLEMPALLI BINDU SREE SATYANo ratings yet
- Moral Agent - Developing Virtue As HabitDocument2 pagesMoral Agent - Developing Virtue As HabitCesar Jr Ornedo OrillaNo ratings yet
- Cylinder Liner W32Document1 pageCylinder Liner W32Poma100% (1)
- Quick Healthcare Stencil: SketchDocument2 pagesQuick Healthcare Stencil: SketchNafiz Hannan NabilNo ratings yet
- Sustainability and Design EthicsDocument178 pagesSustainability and Design EthicsAbby SmithNo ratings yet