You might also like
- EM-II Lab Manual 28.10.08 LatestDocument72 pagesEM-II Lab Manual 28.10.08 LatestPakala YedukondaluNo ratings yet
- Electrical Machines 1 Lab Manual May 2015Document129 pagesElectrical Machines 1 Lab Manual May 2015SufiSayyidZakiyahNo ratings yet
- 02-Alternator On LoadDocument12 pages02-Alternator On Loadcooldude99344100% (1)
- PPTDocument28 pagesPPTSri RamNo ratings yet
- Synchronous Machine Power and Torque CalculationDocument18 pagesSynchronous Machine Power and Torque CalculationUsama RaoNo ratings yet
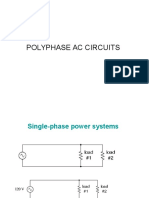
- Polyphase Ac CircuitsDocument18 pagesPolyphase Ac CircuitsRay YudaNo ratings yet
- Electrical Machines-I Lab ManualDocument24 pagesElectrical Machines-I Lab Manualankur_sharma_95No ratings yet
- 3-Phase IM Direction Reversal by Phase ReversalDocument2 pages3-Phase IM Direction Reversal by Phase ReversalAshutoshBhattNo ratings yet
- Analysing Three Phase Circuits PDFDocument16 pagesAnalysing Three Phase Circuits PDFsenthilNo ratings yet
- DC Machines and Transformers Lab ManualDocument50 pagesDC Machines and Transformers Lab ManualSuseel MenonNo ratings yet
- Module 8: Armature Reaction and Commutation in DC MachinesDocument11 pagesModule 8: Armature Reaction and Commutation in DC MachinesJoshua Roberto GrutaNo ratings yet
- Ac Machines Lab ManualDocument102 pagesAc Machines Lab ManualAshwin Gopinath100% (3)
- Electrical Machines Quiz QuestionsDocument13 pagesElectrical Machines Quiz Questionskarthi100% (1)
- EEE431 Module 2Document27 pagesEEE431 Module 2Victor ImehNo ratings yet
- Transformer Voltage Regulation GuideDocument21 pagesTransformer Voltage Regulation GuideAbdelilahaliNo ratings yet
- DC Machines Lab ManualDocument56 pagesDC Machines Lab ManualRockstar RichNo ratings yet
- Date Performed: - Rating: - Date SubmittedDocument39 pagesDate Performed: - Rating: - Date SubmittedALlan ABiangNo ratings yet
- A.C Single Phase 4-Pole Squirrel Cage Induction Motor TheoryDocument5 pagesA.C Single Phase 4-Pole Squirrel Cage Induction Motor TheoryCønstäh Van Der WüppertälärîanskíhNo ratings yet
- Questions On Electrical Machine Applications Armature Reaction and CommutationDocument12 pagesQuestions On Electrical Machine Applications Armature Reaction and Commutationkibrom atsbhaNo ratings yet
- Electrical Machines-II Lab ManualDocument52 pagesElectrical Machines-II Lab Manualsai100% (1)
- Vector problems and electric circuitsDocument4 pagesVector problems and electric circuitsVan Daryl C MonteNo ratings yet
- Magenetic Chip Collector New 2Document27 pagesMagenetic Chip Collector New 2Hemasundar Reddy JolluNo ratings yet
- Department of Electrical and Electronics Engineering: List of Experiments SL - No Name of The Experiment Page NoDocument51 pagesDepartment of Electrical and Electronics Engineering: List of Experiments SL - No Name of The Experiment Page Nosuresh270No ratings yet
- EE8261-Electric Circuits Lab Manual PDFDocument91 pagesEE8261-Electric Circuits Lab Manual PDFPraveen Kumar50% (2)
- Solid State On Load Tap Changer For Transformer Using ArduinoDocument59 pagesSolid State On Load Tap Changer For Transformer Using ArduinoAkhileswara RaoNo ratings yet
- Electrical Machines Lab ManualDocument37 pagesElectrical Machines Lab ManualAtharv ParanjpeNo ratings yet
- ELEC4612-11 Exp 1 IntroductionDocument6 pagesELEC4612-11 Exp 1 IntroductionJoseph MouNo ratings yet
- of SRMDocument22 pagesof SRMGopoji Dayanand71% (7)
- Asynchronous Machines Tutorial Sheets (EL-208Document10 pagesAsynchronous Machines Tutorial Sheets (EL-208Kushagra BhatiaNo ratings yet
- 50 Handbook Ee V SemDocument50 pages50 Handbook Ee V SemSoumil SarkarNo ratings yet
- MA-415 Industrial Drives Lab IndexDocument19 pagesMA-415 Industrial Drives Lab IndexMayankJainNo ratings yet
- Power Electronics Lab ManualDocument89 pagesPower Electronics Lab ManualPartha DewriNo ratings yet
- Lab Manual Electrical Workshop4 IDocument47 pagesLab Manual Electrical Workshop4 Ishoaib ehsanNo ratings yet
- Machies Singly ExcitedDocument15 pagesMachies Singly ExcitedMohamed ElfekyNo ratings yet
- Basic Motor Control GuideDocument17 pagesBasic Motor Control GuideHeizen BulanNo ratings yet
- Three Phase Synchronous MachinesDocument14 pagesThree Phase Synchronous MachinesMohdFirdausNo ratings yet
- Voltage Divider BiasDocument4 pagesVoltage Divider BiasRememberMeNo ratings yet
- Electric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, UttarakhandDocument15 pagesElectric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, Uttarakhandjaya mishraNo ratings yet
- Magnetization Characteristics of A D.C. Shunt Generator: Exp. No: DateDocument60 pagesMagnetization Characteristics of A D.C. Shunt Generator: Exp. No: DateSuyash SinghNo ratings yet
- Academic Projects For B.Tech/M.TechDocument45 pagesAcademic Projects For B.Tech/M.TechhaleemforyouNo ratings yet
- Stepper Motor 1Document2 pagesStepper Motor 1sivaNo ratings yet
- Detection of Fault Location in Transmission Line Using Internet of Things (Iot)Document3 pagesDetection of Fault Location in Transmission Line Using Internet of Things (Iot)Journal 4 ResearchNo ratings yet
- Basic Electrical LabDocument32 pagesBasic Electrical Labsrinu247No ratings yet
- National Institute of Technology, Rourkela: Department of Electrical EngineeringDocument11 pagesNational Institute of Technology, Rourkela: Department of Electrical Engineeringvineeth kumarNo ratings yet
- Exp. 3 - Load Test and Equivalent Circuit Determination On Three Phase Squirrel Cage Induction Motor andDocument9 pagesExp. 3 - Load Test and Equivalent Circuit Determination On Three Phase Squirrel Cage Induction Motor andSanjay MeenaNo ratings yet
- Electronic System Design - ESD SyllabusDocument3 pagesElectronic System Design - ESD SyllabusAnoop MathewNo ratings yet
- Electri Circuits Lab Manual 1Document11 pagesElectri Circuits Lab Manual 1Sri RoNo ratings yet
- UNIT-1 DC Machines: ConstructionDocument54 pagesUNIT-1 DC Machines: ConstructionT.ThilagamaniNo ratings yet
- EMI Lab ManualDocument81 pagesEMI Lab Manualkiran_y2No ratings yet
- EM-I Lab Manual 28.10.08 LatestDocument82 pagesEM-I Lab Manual 28.10.08 Latestjoe2509100% (6)
- EE Lab Manual for Mechanical Engineering StudentsDocument64 pagesEE Lab Manual for Mechanical Engineering Studentsbhavanimurugaramalin33% (3)
- PLC & Scada Lab Manual (Part-1)Document33 pagesPLC & Scada Lab Manual (Part-1)Pavan Deshpande70% (10)
- PLC Scada Lab Manual Part 1 PDFDocument33 pagesPLC Scada Lab Manual Part 1 PDFAnonymous huaIYe1100% (1)
- Eletrical MeasurementsDocument56 pagesEletrical MeasurementsRajkumar PulaputhurNo ratings yet
- Laboratory Practice Safety RulesDocument4 pagesLaboratory Practice Safety RulesGetahun Shanko KefeniNo ratings yet
- Lab Safety RulesDocument3 pagesLab Safety RulesAlluri Appa RaoNo ratings yet
- Ee2259 Electrical Machines I LaboratoryDocument47 pagesEe2259 Electrical Machines I LaboratoryfvijayamiNo ratings yet
- EE Lab Manual for Electrical MachinesDocument60 pagesEE Lab Manual for Electrical MachinesSHYAM SUNDAR OJHA SHYAMNo ratings yet
- EM-II Lab Manual - 1 PDFDocument60 pagesEM-II Lab Manual - 1 PDFSHYAM SUNDAR OJHA SHYAMNo ratings yet
- Eee 3307Document42 pagesEee 3307Hesham HamdyNo ratings yet
- VisakhapatnamDocument13 pagesVisakhapatnamgopi_905No ratings yet
- CullenLevittCrimeUrban1999 PDFDocument11 pagesCullenLevittCrimeUrban1999 PDFgopi_905No ratings yet
- Environment and CrimeDocument25 pagesEnvironment and CrimematthewafarrNo ratings yet
- Magnetic CircuitsDocument52 pagesMagnetic Circuitsgopi_905100% (1)
- TicketDocument1 pageTicketgopi_905No ratings yet
- Mayors GuideDocument68 pagesMayors Guidegopi_905No ratings yet
- City Crime Rankings 2014: Rankings by Population CategoriesDocument1 pageCity Crime Rankings 2014: Rankings by Population Categoriesgopi_905No ratings yet
- FuseDocument2 pagesFusegopi_905No ratings yet
- Faraday"s LawDocument12 pagesFaraday"s LawashrafraziNo ratings yet
- Induction NotesDocument15 pagesInduction NotesKartikNo ratings yet
- Windows 8 - Notice PDFDocument1 pageWindows 8 - Notice PDFSanthosh KumarNo ratings yet
- InsureDocument1 pageInsuregopi_905No ratings yet
- Elesus 02 ES Istosmjerni ENGL 12-13Document31 pagesElesus 02 ES Istosmjerni ENGL 12-13gopi_905No ratings yet
- Fileadmin Catalog Multimedia PPT Fuses Vs Circuit Breakers For Low Voltage ApplicationsDocument15 pagesFileadmin Catalog Multimedia PPT Fuses Vs Circuit Breakers For Low Voltage Applicationsgopi_905No ratings yet
- TicketDocument1 pageTicketgopi_905No ratings yet
- Electric Motor Fundamentals: Types, Operation and ModelingDocument30 pagesElectric Motor Fundamentals: Types, Operation and Modelinggopi_905No ratings yet
- 05 DC MicrogridsDocument18 pages05 DC Microgridsgopi_905No ratings yet
- PresentationDocument16 pagesPresentationsrinu247No ratings yet
- Design Realization: John Canny 10/30/03Document35 pagesDesign Realization: John Canny 10/30/03muserahmatNo ratings yet
- Lecture 05 - DC MotorsDocument105 pagesLecture 05 - DC MotorsShivam SinghNo ratings yet
- Speed Control of DC Motors (DC Drives)Document27 pagesSpeed Control of DC Motors (DC Drives)gopi_905No ratings yet
- Direct - Current Motor Characteristics and ApplicationsDocument58 pagesDirect - Current Motor Characteristics and ApplicationsMaman SomantriNo ratings yet
- Generators and MotorsDocument18 pagesGenerators and MotorsMuhammad Kashif IshaqueNo ratings yet
- CDA 4170 - Data Acquisition and Control Systems Janusz ZalewskiDocument9 pagesCDA 4170 - Data Acquisition and Control Systems Janusz Zalewskigopi_905No ratings yet
- DC MachinesDocument31 pagesDC Machinesravi26vNo ratings yet
- Sohaib Hasan - Brushless DC MotorsDocument12 pagesSohaib Hasan - Brushless DC Motorsgopi_905No ratings yet
- CDA 4170 - Data Acquisition and Control Systems Janusz ZalewskiDocument9 pagesCDA 4170 - Data Acquisition and Control Systems Janusz Zalewskigopi_905No ratings yet
- DC Current Electricity and MagnetismDocument23 pagesDC Current Electricity and Magnetismgopi_905No ratings yet
- Generators, Motors and How We Get ElectricityDocument17 pagesGenerators, Motors and How We Get Electricitygopi_905No ratings yet
- DC Motor ActionDocument20 pagesDC Motor Actiongopi_905No ratings yet
- Power Electronics DevicesDocument16 pagesPower Electronics DevicesAlessandro LorussoNo ratings yet
- Lecture Notes Pumps 2022Document15 pagesLecture Notes Pumps 2022Anele HadebeNo ratings yet
- Basic of Thermal StratificationDocument10 pagesBasic of Thermal StratificationHamdani Wahab 2010242012No ratings yet
- Marcet Boiler Experiment Heat Transfer AnalysisDocument3 pagesMarcet Boiler Experiment Heat Transfer AnalysisMedo Saleh0% (1)
- 1N479 PDFDocument3 pages1N479 PDFDiego MaycoNo ratings yet
- Effect of corona on transmission linesDocument5 pagesEffect of corona on transmission linesParimal PatelNo ratings yet
- Electrodynamic Withstand and Effects of Short-Circuit CurrentsDocument6 pagesElectrodynamic Withstand and Effects of Short-Circuit CurrentsTriều Nguyễn NgọcNo ratings yet
- Cambridge IGCSE: PHYSICS 0625/42Document16 pagesCambridge IGCSE: PHYSICS 0625/42Isa ShahidNo ratings yet
- Kozeny Karman EquationDocument2 pagesKozeny Karman Equationvijay kumar honnaliNo ratings yet
- Electrostatics Formula-1Document2 pagesElectrostatics Formula-1Aakash KumarNo ratings yet
- Passive Components TestDocument29 pagesPassive Components TestKesalan TerasaNo ratings yet
- WCU Engineering Lab ReportDocument8 pagesWCU Engineering Lab Reportallan_zirconia444No ratings yet
- 2SC1383/2SC1384 Transistor Specs & CharacteristicsDocument5 pages2SC1383/2SC1384 Transistor Specs & Characteristicsnugroho_budiNo ratings yet
- Motion On An Inclined PlaneDocument55 pagesMotion On An Inclined PlaneUwyebsb JjehdbsbwNo ratings yet
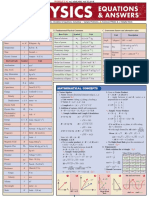
- Quick Study - Physics Equations & AnswersDocument6 pagesQuick Study - Physics Equations & AnswersjavierfajardoNo ratings yet
- Electrical Engineering SlidesDocument12 pagesElectrical Engineering SlidessbatatiNo ratings yet
- Physics Chapter 13 HWDocument9 pagesPhysics Chapter 13 HWSam ZahzouhiNo ratings yet
- 927 Series: ModelsDocument3 pages927 Series: ModelsArmando LopezNo ratings yet
- International Iec 60076-11 2018Document30 pagesInternational Iec 60076-11 2018sokrat sebti100% (2)
- Lecture Notes On General RelativityDocument962 pagesLecture Notes On General RelativityClara MenendezNo ratings yet
- What Is VK and Imag IDocument4 pagesWhat Is VK and Imag Ijhakg_169712275No ratings yet
- 1st Year Syllabus Physics Cycle SyllabusDocument24 pages1st Year Syllabus Physics Cycle SyllabusMuwaizNo ratings yet
- Chapter 04 Solution Van Wylen 8aDocument244 pagesChapter 04 Solution Van Wylen 8aPatricia VazNo ratings yet
- VK+Formula Calculation +sampleDocument4 pagesVK+Formula Calculation +sampleSudhakar Ys50% (2)
- Impeder Cores for High Frequency Pipe WeldingDocument13 pagesImpeder Cores for High Frequency Pipe WeldingАлексей АндрияшNo ratings yet
- A Two-Stage Stirling CryocoolerDocument7 pagesA Two-Stage Stirling CryocoolerrkoGearNo ratings yet
- Earth TesterDocument10 pagesEarth TesternananghadisodikinNo ratings yet
- LV and HV Cable SizingDocument7 pagesLV and HV Cable Sizingelectrifier_suren100% (1)
- Physics-1-Module-5-Laboratory Activity No. 5Document3 pagesPhysics-1-Module-5-Laboratory Activity No. 5Vince GarciaNo ratings yet
- Mock CPhO Finals Training 1Document13 pagesMock CPhO Finals Training 1Nguyễn Trần Minh Trí100% (1)